
一种去蜂窝大规模MIMO系统定位方法.pdf

猫巷****雪凝

1/10

2/10
3/10

4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种去蜂窝大规模MIMO系统定位方法.pdf
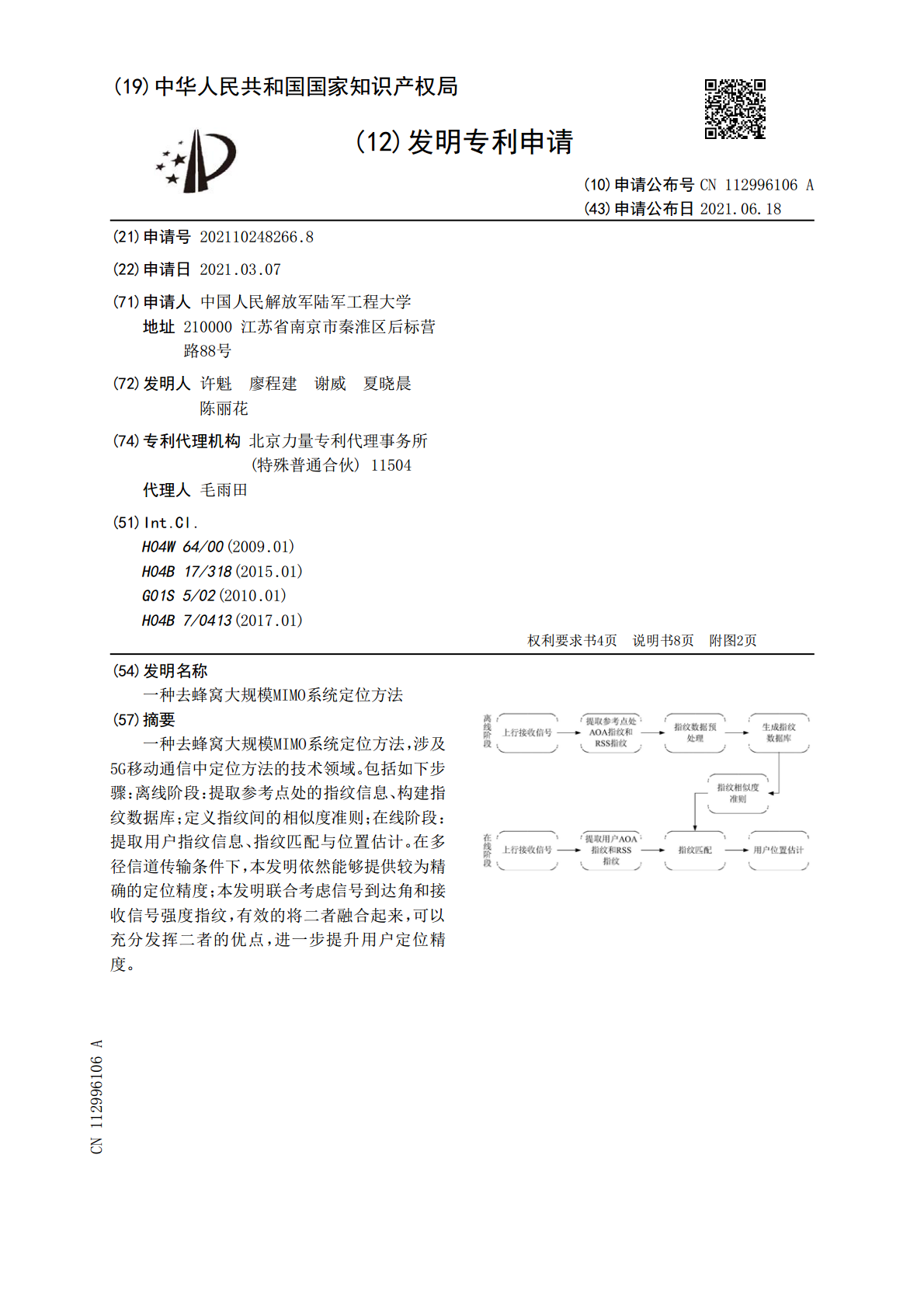
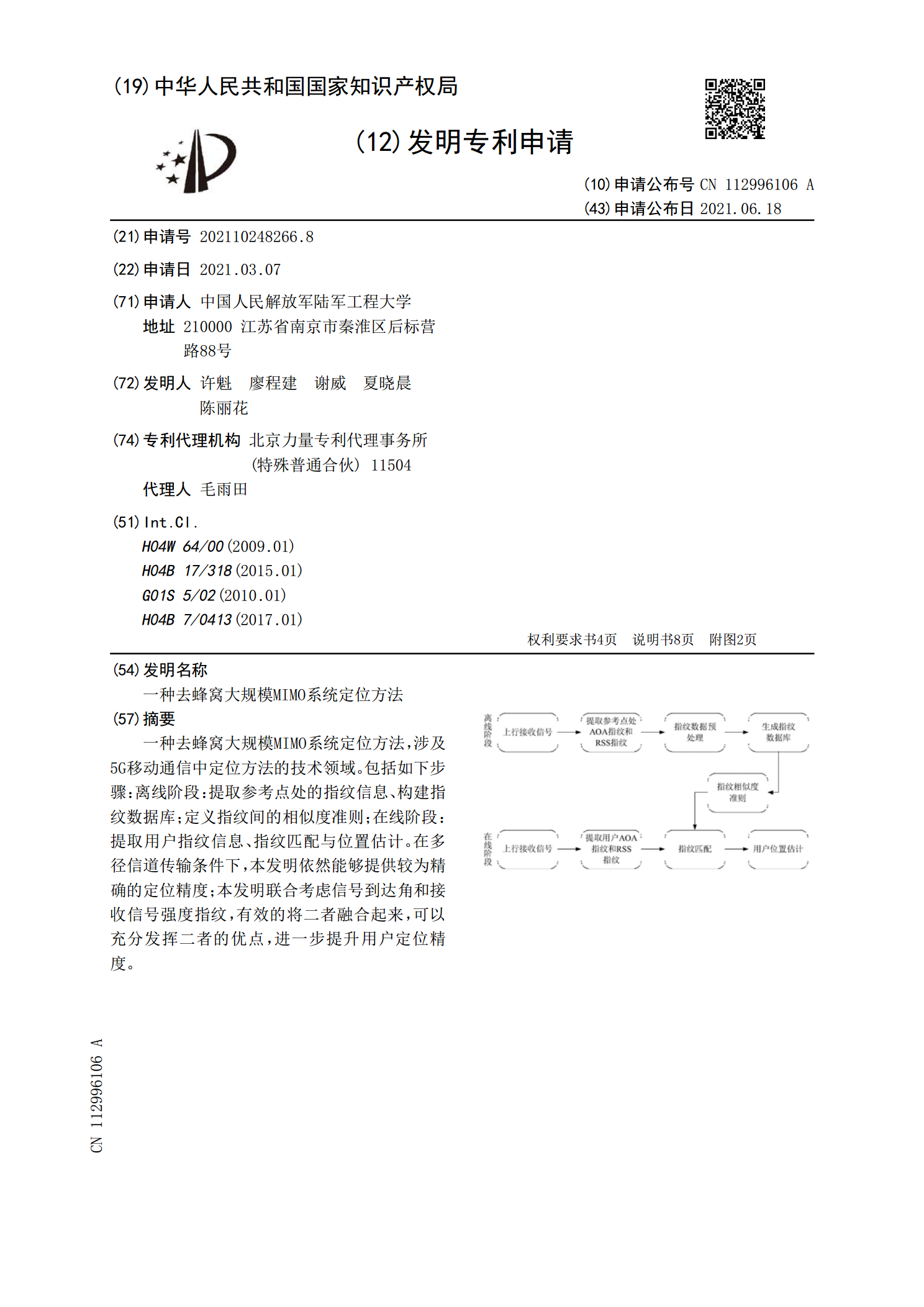
一种去蜂窝大规模MIMO系统定位方法,涉及5G移动通信中定位方法的技术领域。包括如下步骤:离线阶段:提取参考点处的指纹信息、构建指纹数据库;定义指纹间的相似度准则;在线阶段:提取用户指纹信息、指纹匹配与位置估计。在多径信道传输条件下,本发明依然能够提供较为精确的定位精度;本发明联合考虑信号到达角和接收信号强度指纹,有效的将二者融合起来,可以充分发挥二者的优点,进一步提升用户定位精度。
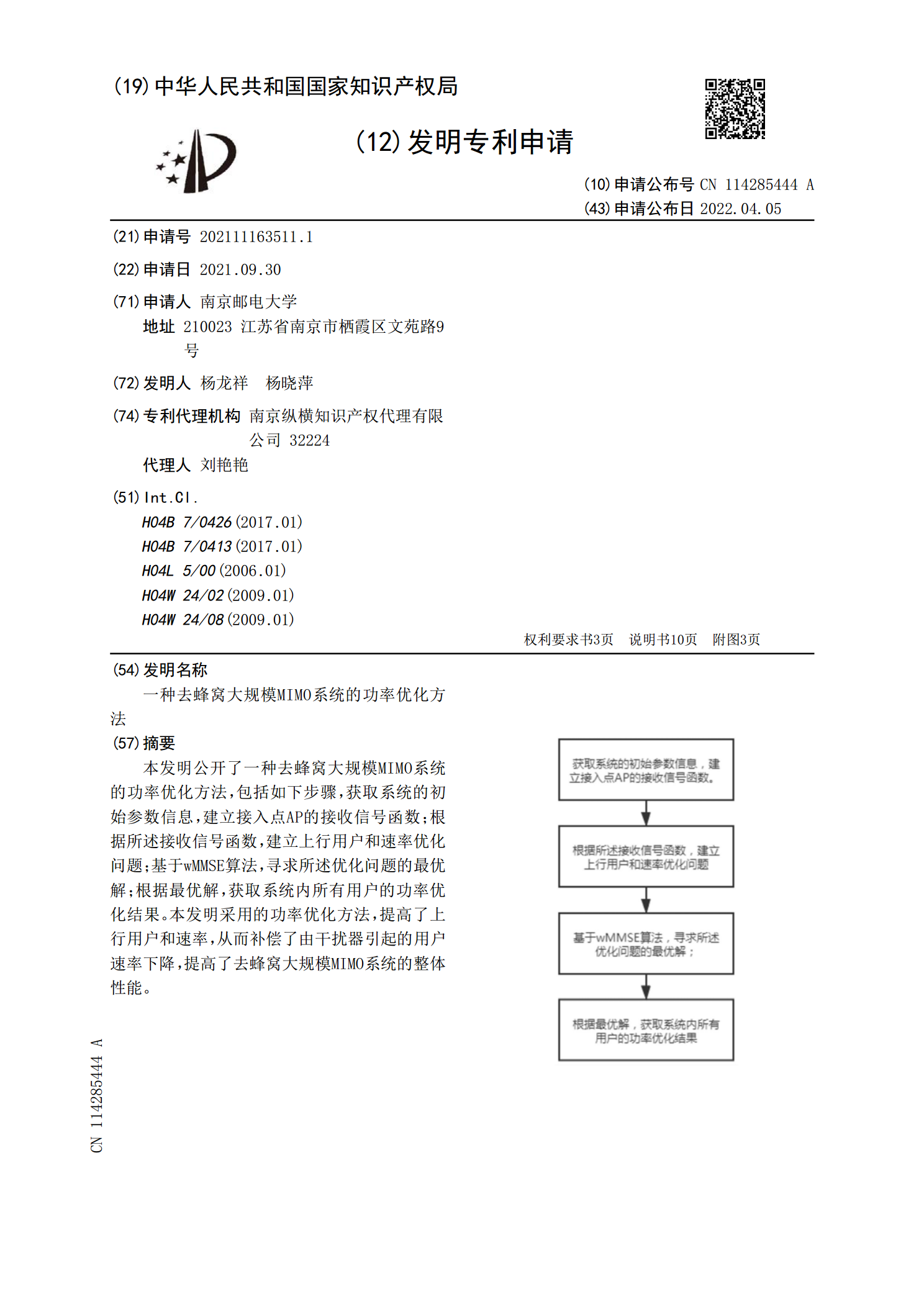
一种去蜂窝大规模MIMO系统的功率优化方法.pdf
本发明公开了一种去蜂窝大规模MIMO系统的功率优化方法,包括如下步骤,获取系统的初始参数信息,建立接入点AP的接收信号函数;根据所述接收信号函数,建立上行用户和速率优化问题;基于wMMSE算法,寻求所述优化问题的最优解;根据最优解,获取系统内所有用户的功率优化结果。本发明采用的功率优化方法,提高了上行用户和速率,从而补偿了由干扰器引起的用户速率下降,提高了去蜂窝大规模MIMO系统的整体性能。

一种在去蜂窝大规模MIMO系统中提升系统性能的方法.pdf
本发明公开了一种在去蜂窝大规模MIMO系统中提升系统性能的方法,建立移动终端到无线接入点的信道进行估计模型,获得无线接入点接收上行链路矢量以及接收的信号,再获得中央处理器接收的信号;进一步获得系统的上行和速率。根据功率控制因子构造上行和速率最大化问题P1,再将该问题P1转化为凸优化问题P2;使用拉格朗日函数求解凸优化问题P2,获得第一最优功率控制因子;通过预设方法B求解凸优化问题P2,获得第二最优功率控制因子;在相同的硬件条件下比较第一、第二最优功率控制因子,获得最终最优功率控制因子。本发明的算法优化了上

一种下行去蜂窝大规模MIMO系统的建立方法.pdf
本发明揭示了一种下行去蜂窝大规模MIMO系统的建立方法,包括如下步骤:S1、建立基于低分辨率ADCs/DACs多组多播多用户多天线的下行去蜂窝大规模MIMO系统模型;S2、对S1中所建立的下行去蜂窝大规模MIMO系统模型进行有效性评价;S2中的有效性评价方式包括计算模型下行链路的频谱效率以及计算模型的能量效率。由本发明的方法所建立的系统模型,可以在确保系统鲁棒性的前提下,尽可能地提升系统的效率、降低系统实现的复杂度。而且本发明还能够作为技术思路的依据,对日后的多组多播去蜂窝大规模MIMO系统的设计提供具体
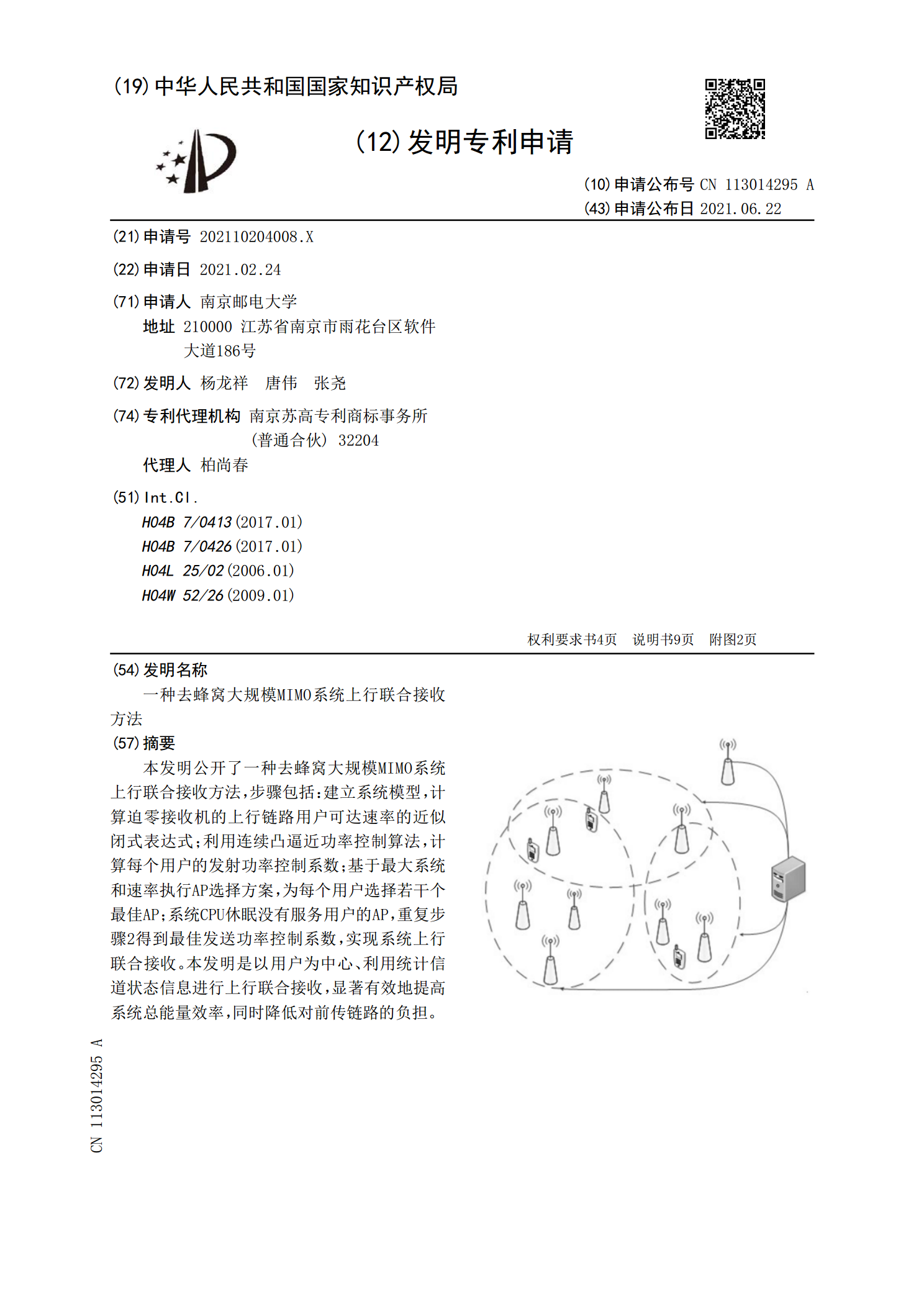
一种去蜂窝大规模MIMO系统上行联合接收方法.pdf
本发明公开了一种去蜂窝大规模MIMO系统上行联合接收方法,步骤包括:建立系统模型,计算迫零接收机的上行链路用户可达速率的近似闭式表达式;利用连续凸逼近功率控制算法,计算每个用户的发射功率控制系数;基于最大系统和速率执行AP选择方案,为每个用户选择若干个最佳AP;系统CPU休眠没有服务用户的AP,重复步骤2得到最佳发送功率控制系数,实现系统上行联合接收。本发明是以用户为中心、利用统计信道状态信息进行上行联合接收,显著有效地提高系统总能量效率,同时降低对前传链路的负担。