
Cz硅单晶炉用高频开关电源的控制系统及控制方法.pdf

论文****可爱


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

Cz硅单晶炉用高频开关电源的控制系统及控制方法.pdf
本发明公开的Cz硅单晶炉用高频开关电源的控制系统及控制方法,将自适应模糊控制与滑模变结构控制相结合,针对Cz硅单晶炉用高频开关加热电源,设计基于自适应模糊滑模变结构控制方法的电源控制器,发挥模糊控制和滑模变结构控制各自的优势,进一步提高系统的动态性能,对输入电压或者负载扰动具有现象较好的鲁棒性,减轻或避免了一般滑模出现的抖振。

MCZ硅单晶炉用超导磁体励磁高频开关电源的控制方法.pdf
本发明公开了MCZ硅单晶炉用超导磁体励磁高频开关电源的控制方法,针对MCZ硅单晶炉用超导磁体励磁电源,将增量式控制与传统模糊滑模控制相结合,设计了基于增量式切换项的模糊滑模变结构控制方法。本发明利用滑模控制具有较强鲁棒性的优点,提高系统的动态性能;利用模糊控制对切换项系数进行实时调整,以减小滑模控制中存在的抖振;利用增量式切换项对输出占空比进行调整,以消除实际控制中存在的稳态误差并降低系统对噪声的灵敏度;在每个开关周期内对开关管的占空比进行补偿,动态地调整占空比的大小,在保证较大误差情况下趋近速度同时,保

用高频波进行硅单晶生长过程控制的硅单晶炉.pdf
本公开涉及一种用高频波进行硅单晶生长过程控制的,其特征在于包括炉体、以及坩埚,其中,所述坩埚位于炉体内,用于容纳原料,其中,所述炉体的侧壁和/或底部布置有馈波孔,用于与外部微波加热组件对接,以对坩埚内的原料进行加热,所述坩埚由石英钳锅、以及套在所述石英钳锅外的石墨钳锅组成,所述石墨坩埚的底部连接有坩埚轴,所述坩埚轴从所述炉体的底部贯穿,用于在单晶硅生长过程中上下移动和转动所述坩埚。本公开使用微波提供热能,充分利用波能的频率和波长特性,既能达到直接高效加热硅料又能绕开介质的吸能浪费,根据多晶料的特性做到高效
一种碳化硅单晶炉用压力控制系统.pdf
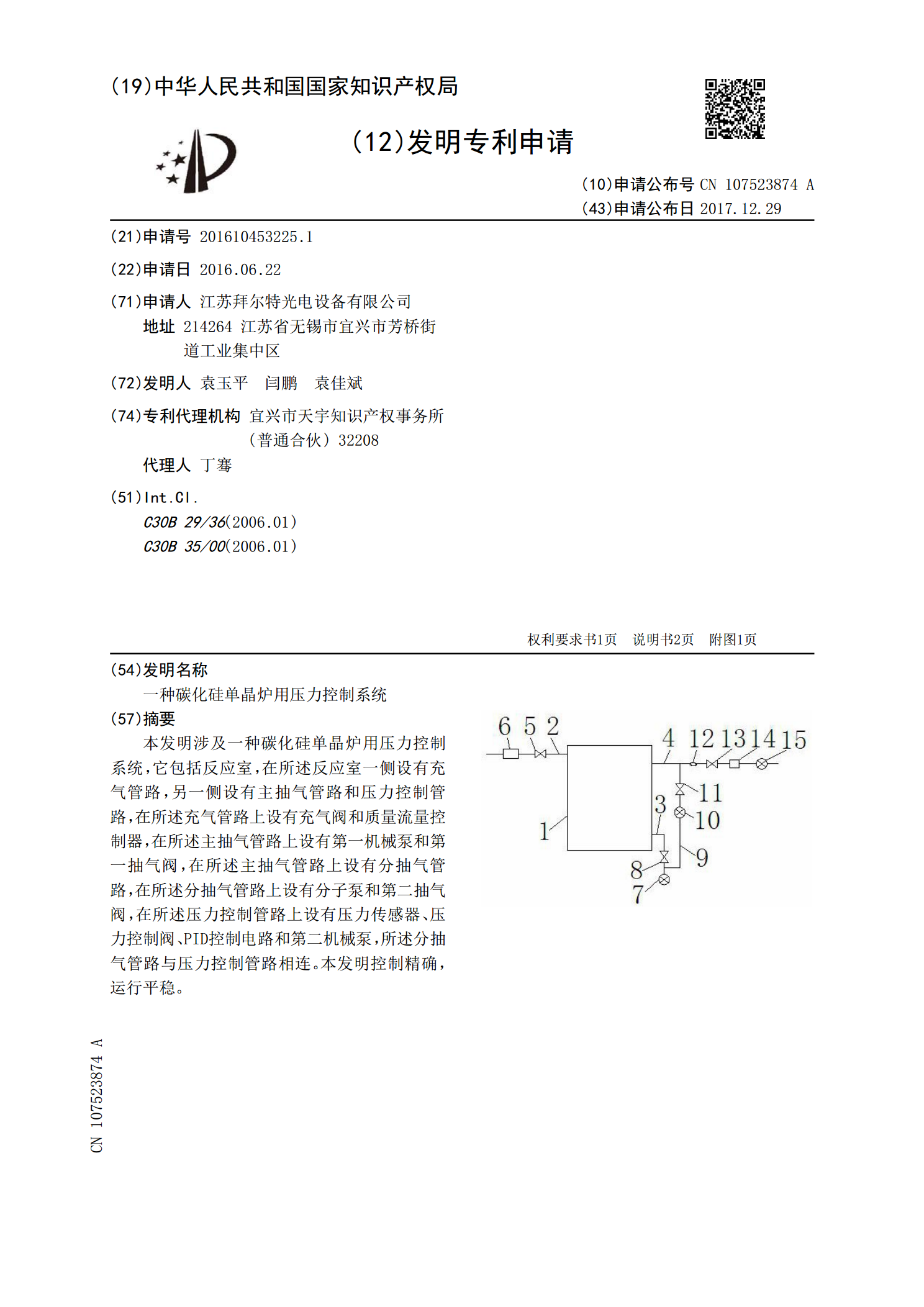
本发明涉及一种碳化硅单晶炉用压力控制系统,它包括反应室,在所述反应室一侧设有充气管路,另一侧设有主抽气管路和压力控制管路,在所述充气管路上设有充气阀和质量流量控制器,在所述主抽气管路上设有第一机械泵和第一抽气阀,在所述主抽气管路上设有分抽气管路,在所述分抽气管路上设有分子泵和第二抽气阀,在所述压力控制管路上设有压力传感器、压力控制阀、PID控制电路和第二机械泵,所述分抽气管路与压力控制管路相连。本发明控制精确,运行平稳。

一种90单晶节能控制炉用高频开关电源.pdf
本发明公开了一种90单晶节能控制炉用高频开关电源,主要内容为:所述电源输入与熔断保护电路连接,熔断保护电路与三相全桥整流模块连接,三相全桥整流模块分别与软启动控制模块、直流采样模块和LC滤波模块连接,直流采样模块分别与保护电路和电感滤波模块连接,保护电路与主控电路连接,主控电路与驱动电路连接,LC滤波模块和驱动电路都与高频逆变器连接,高频逆变器与高频变压器连接,高频变压器与高效整流模块连接,高效整流模块与电感滤波模块连接,电感滤波模块与电源输出模块连接。