
一种带有气杆缓冲的永磁轮爬臂机器人.pdf

书生****文章

1/6
2/6

3/6

4/6
5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种带有气杆缓冲的永磁轮爬臂机器人.pdf
一种带有气杆缓冲的永磁轮爬臂机器人,本发明涉及一种永磁轮爬臂机器人,本发明为解决现有技术中还没有出现可以在水冷壁上进行爬行的带有气杆缓冲的永磁轮爬臂机器人,以及没有出现通过带有气杆缓冲的永磁轮爬臂机器人对循环流化床锅炉中水冷壁进行检查的机器人,它包括气杆缓冲连接机构、两个探头支撑机构、两个连接杆、两个主架体、两个主动行走轮机构、两个从动行走轮机构和两个驱动电机;从动行走轮机构包括永磁从动轮、从动轮轴和从动轮固定架,主动行走轮机构包括驱动电机固定板、永磁主动轮、主动轮轴、主动轮固定架和两个锥齿轮,气杆缓冲连

一种带有气杆缓冲的V形永磁链片的爬臂机器人.pdf
一种带有气杆缓冲的V形永磁链片的爬臂机器人,以解决现有水冷壁机器人运动攀爬不灵活的问题。气杆缓冲连接机构包括两组交叉气杆组件,每组交叉气杆组件包括两个气杆,两个气杆交叉设置,两组交叉气杆组件上下设置且四个气杆的外壳组成菱形,左侧的上下两个气杆外壳通过第一销钉与左侧的主架体铰接,右侧的上下两个气杆外壳通过第一销钉与右侧的主架体铰接,每个气杆的内杆通过第二销钉与相对应的固定件铰接,每个固定件固装在相应的连接杆上,每个从动轮固定架上固装有一个探头支撑机构,每条梯形同步带上均布设置有数个V形支架,且V形支架的V形

一种带有气杆缓冲的永磁链条爬壁机器人.pdf
一种带有气杆缓冲的永磁链条爬壁机器人,它涉及一种爬壁机器人。本发明为了解决目前并没有专用的水冷壁测厚设备,给水冷壁的养护和检修工作带来了不便的问题。本发明的第一滑轨架和第二滑轨架之间通过至少一根滑轨连接,多个滑套可滑动套装在至少一根滑轨上,直流伺服电机安装在第二滑轨架上,主动轴可转动安装在第二滑轨架内,主动链轮安装在主动轴上,从动轴可转动安装在第二滑轨架内,从动链轮安装在从动轴上,主动链轮与从动链轮之间通过永磁链条组件连接,超声波测厚仪安装在至少一根滑轨的中部,弹性缓冲连接件铰接在第一爬壁腿和第二爬壁腿的
一种带有弹簧缓冲的永磁轮爬臂机器人.pdf
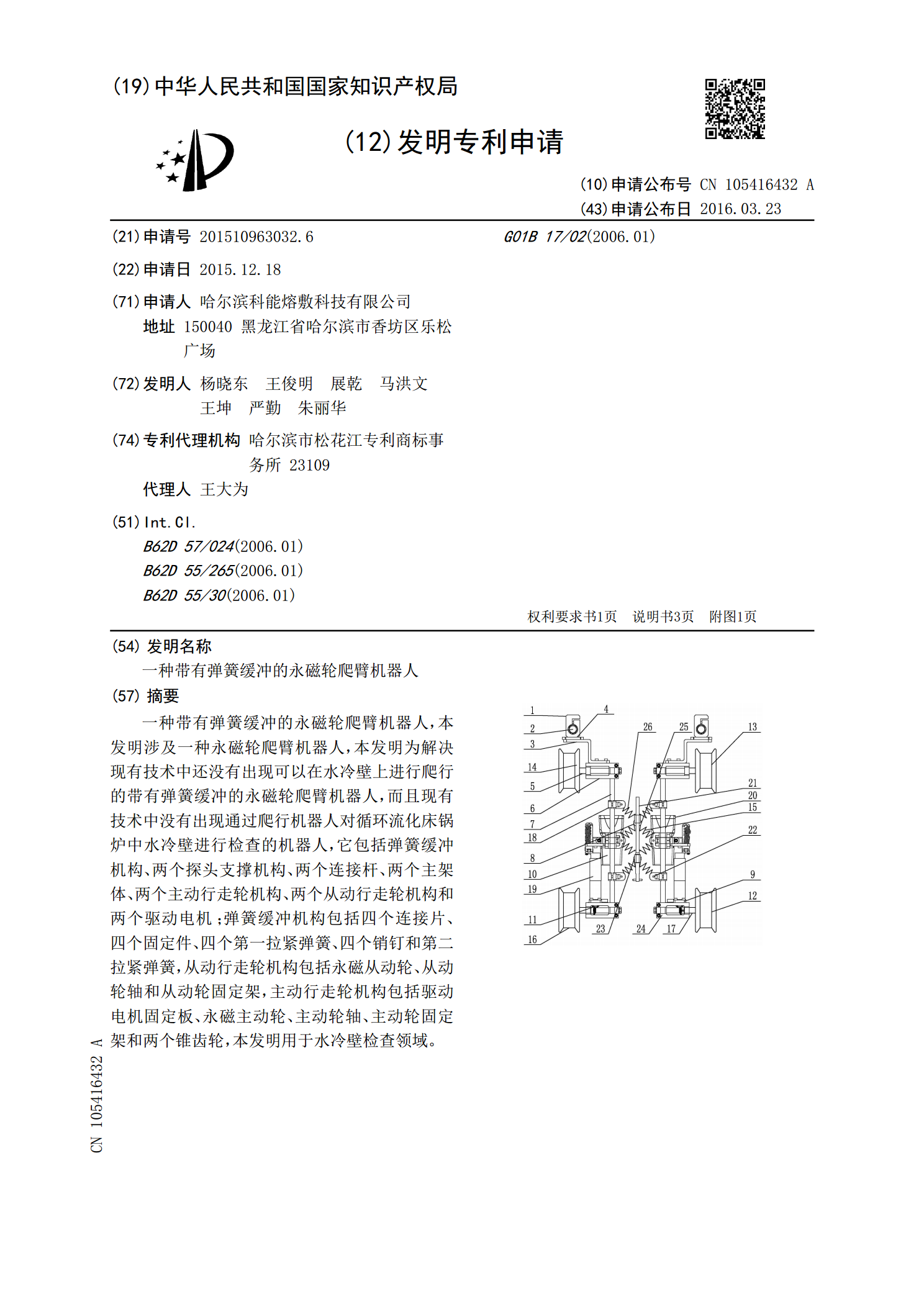
一种带有弹簧缓冲的永磁轮爬臂机器人,本发明涉及一种永磁轮爬臂机器人,本发明为解决现有技术中还没有出现可以在水冷壁上进行爬行的带有弹簧缓冲的永磁轮爬臂机器人,而且现有技术中没有出现通过爬行机器人对循环流化床锅炉中水冷壁进行检查的机器人,它包括弹簧缓冲机构、两个探头支撑机构、两个连接杆、两个主架体、两个主动行走轮机构、两个从动行走轮机构和两个驱动电机;弹簧缓冲机构包括四个连接片、四个固定件、四个第一拉紧弹簧、四个销钉和第二拉紧弹簧,从动行走轮机构包括永磁从动轮、从动轮轴和从动轮固定架,主动行走轮机构包括驱动电

一种带有弹性钢片的永磁轮爬臂机器人.pdf
一种带有弹性钢片的永磁轮爬臂机器人,本发明涉及一种永磁轮爬臂机器人,本发明为解决现有技术中还没有出现可以在水冷壁上进行爬行的机器人,以及没有出现通过爬行机器人对水冷壁进行检查的机器人,它包括弹性钢片连接机构、两个探头支撑机构、两个连接杆、两个主架体、两个主动行走轮机构、两个从动行走轮机构和两个驱动电机;从动行走轮机构包括永磁从动轮、从动轮轴和从动轮固定架,主动行走轮机构包括驱动电机固定板、永磁主动轮、主动轮轴、主动轮固定架和两个锥齿轮,本发明用于水冷壁检查领域。