
基于滑模预测控制的超超临界火电机组协调控制方法.pdf

Wi****m7

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于滑模预测控制的超超临界火电机组协调控制方法.pdf
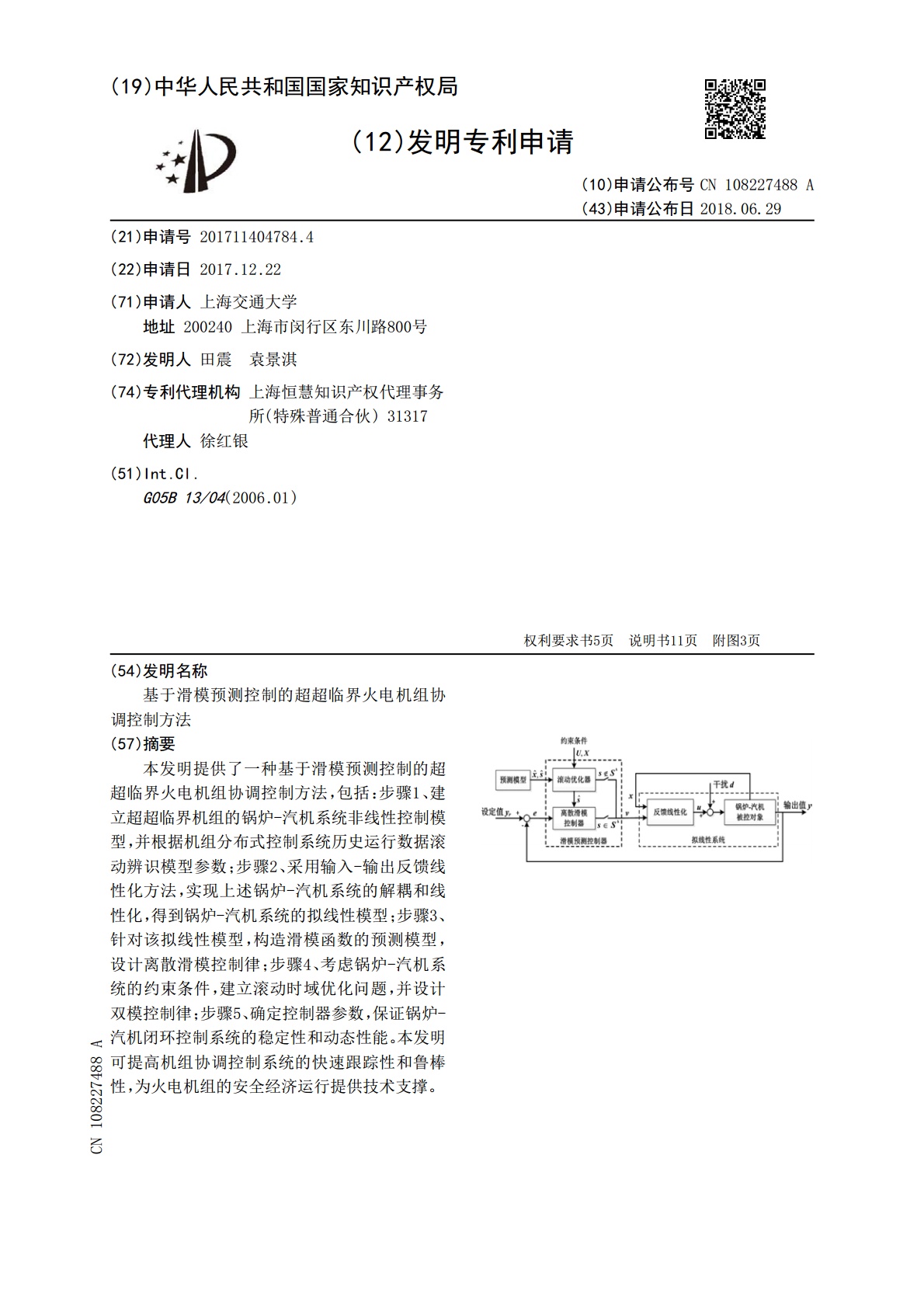
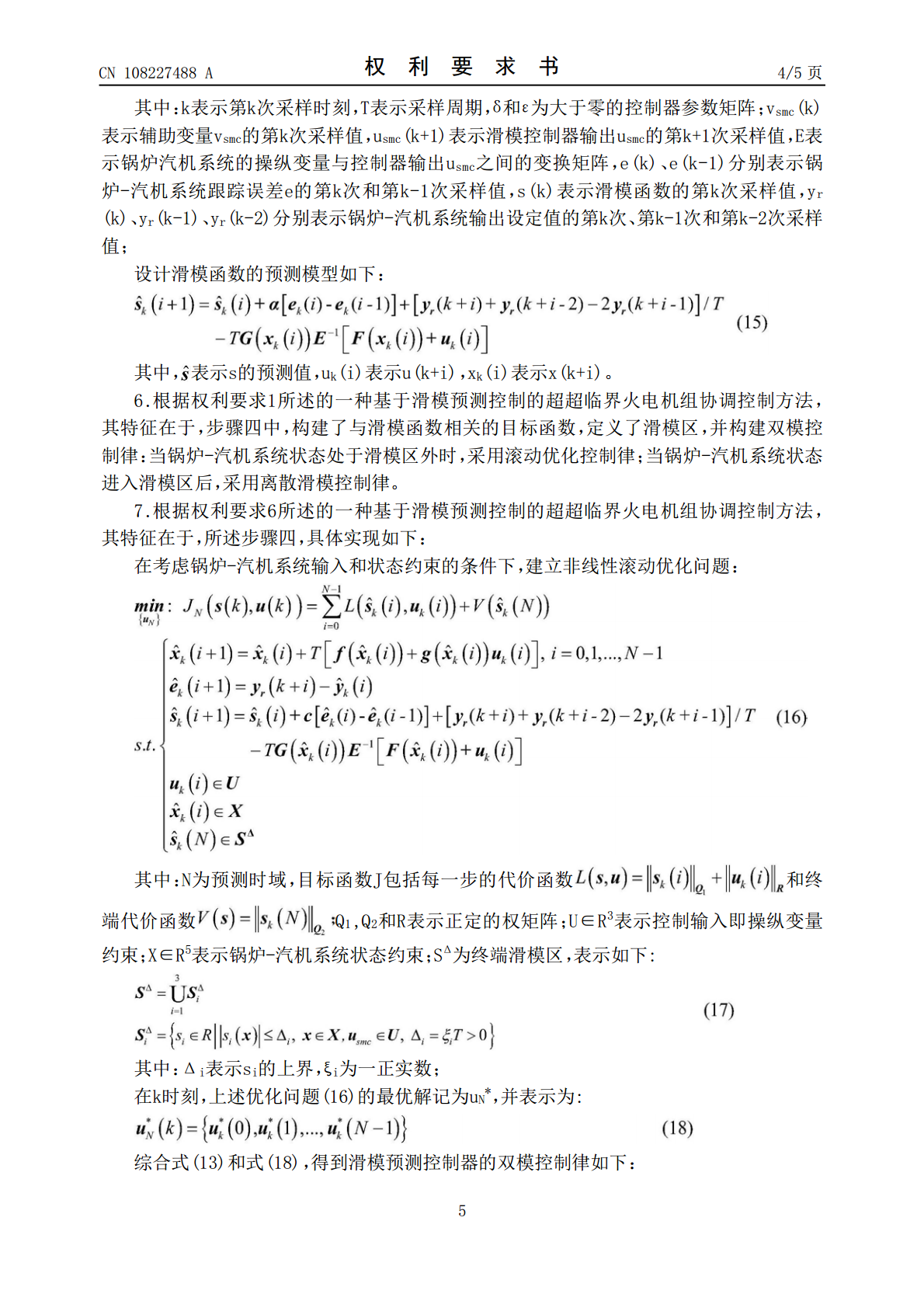
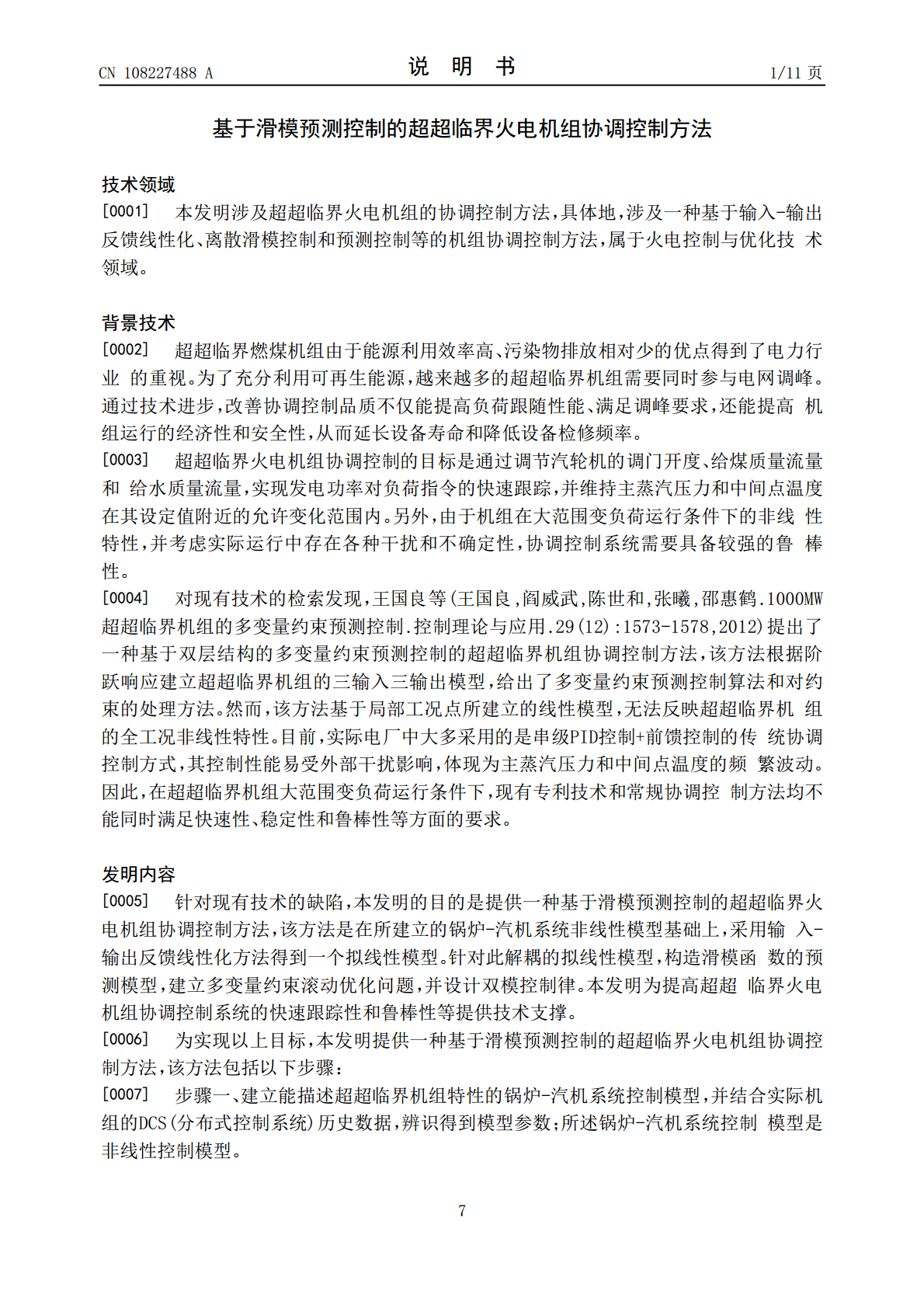
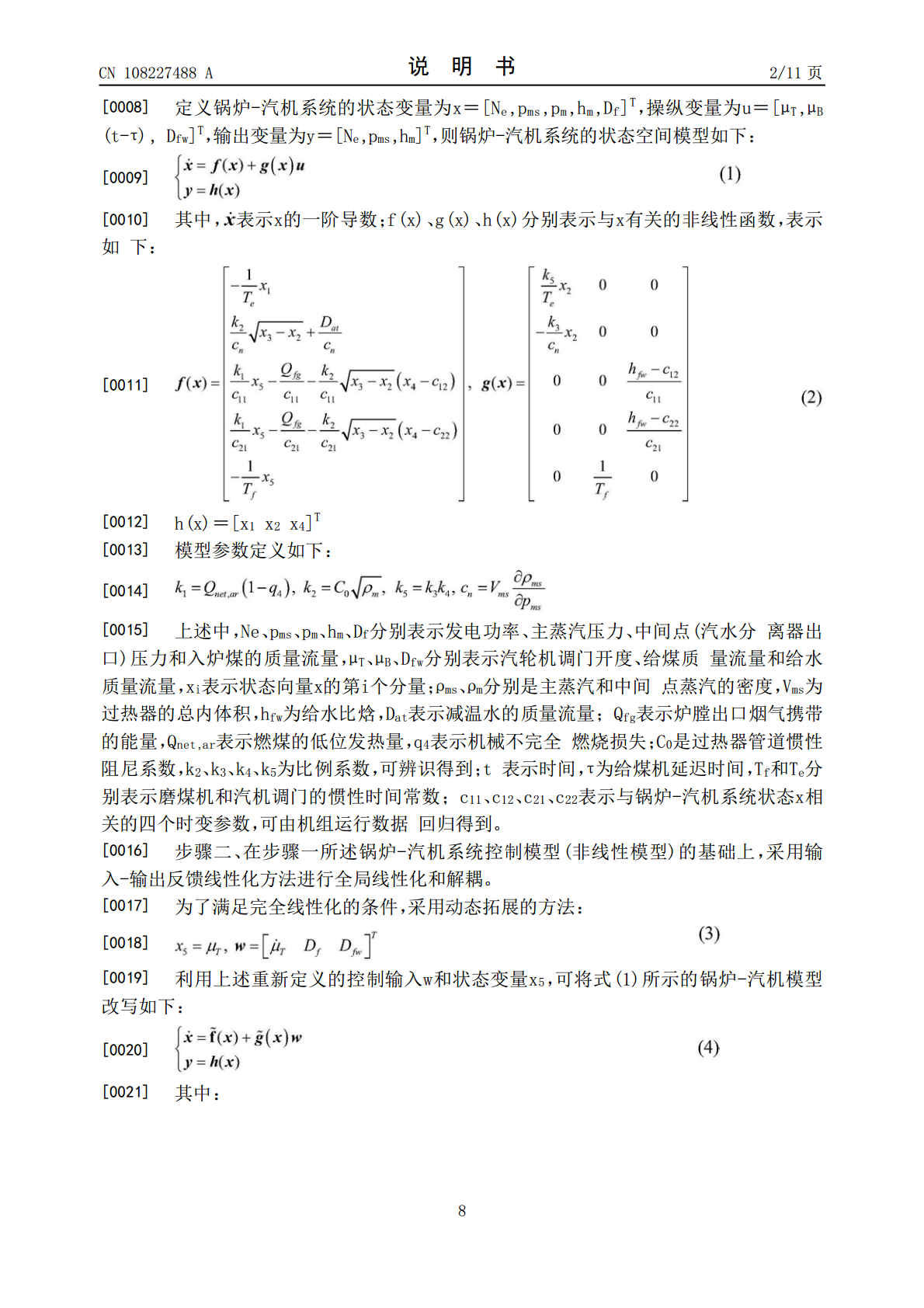
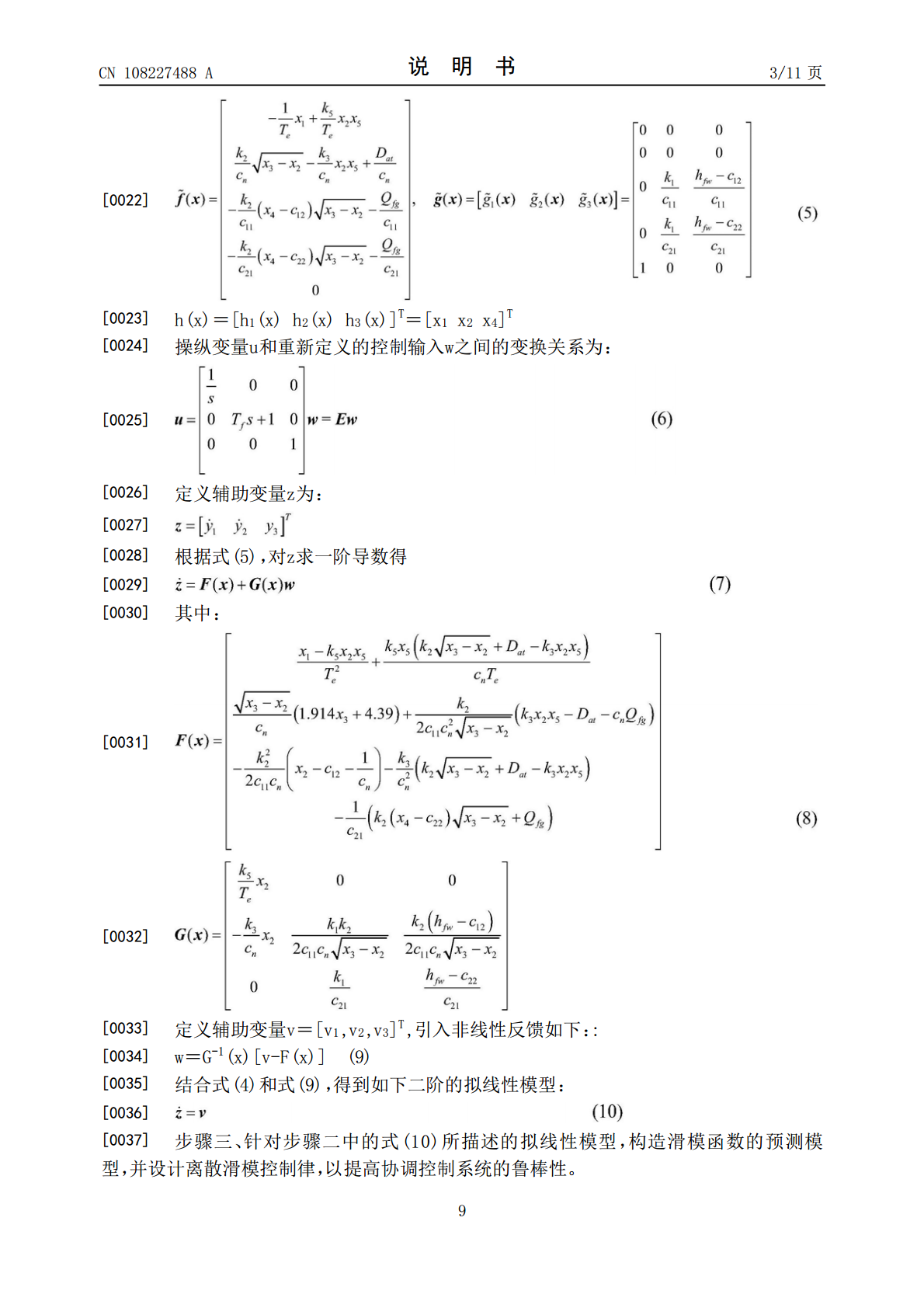
本发明提供了一种基于滑模预测控制的超超临界火电机组协调控制方法,包括:步骤1、建立超超临界机组的锅炉‑汽机系统非线性控制模型,并根据机组分布式控制系统历史运行数据滚动辨识模型参数;步骤2、采用输入‑输出反馈线性化方法,实现上述锅炉‑汽机系统的解耦和线性化,得到锅炉‑汽机系统的拟线性模型;步骤3、针对该拟线性模型,构造滑模函数的预测模型,设计离散滑模控制律;步骤4、考虑锅炉‑汽机系统的约束条件,建立滚动时域优化问题,并设计双模控制律;步骤5、确定控制器参数,保证锅炉‑汽机闭环控制系统的稳定性和动态性能。本发
基于全局滑模控制的亚临界火电机组协调控制方法.pdf
本发明提供一种基于全局滑模控制的亚临界火电机组协调控制方法,包括:选择适用于变工况运行的亚临界锅炉‑汽机系统非线性控制模型,根据实际机组DCS历史运行数据辨识出模型参数,锅炉‑汽机系统是指亚临界锅炉‑汽机系统非线性模型;采用精确反馈线性化方法,对上述非线性系统实现解耦和全局线性化,通过输入变换得到锅炉‑汽机系统的拟线性模型;针对拟线性模型构造时变的二阶滑模函数并设计全局滑模控制律;针对拟线性模型设计增广观测器,估计出外部干扰并在控制器中加入干扰补偿;以跟踪误差积分最小作为目标函数,通过构造优化问题求解出最

基于控制受限MIMO预测控制的超超临界机组集中式协调控制.docx
基于控制受限MIMO预测控制的超超临界机组集中式协调控制基于控制受限MIMO预测控制的超超临界机组集中式协调控制摘要:本论文研究了基于控制受限MIMO预测控制的超超临界机组集中式协调控制问题。针对超超临界机组控制的难点,提出了一种基于控制受限MIMO预测控制的协调控制策略。通过数学模型建立机组系统的描述,并设计了合适的动态矩阵来描述机组的动态特性,使得控制器可以根据系统响应特性进行优化。仿真结果表明,该协调控制策略能够有效提高超超临界机组的控制精度和响应速度。关键词:超超临界机组,协调控制,控制受限MIM

超临界火电机组协调控制分析.docx
超临界火电机组协调控制分析超临界火电机组协调控制分析随着我国经济的发展,能源消耗量不断增加,尤其是火力发电站作为主要的电力供给方式,在满足国家电力需求方面扮演着重要的角色。其中超临界火电机组的研发和应用成为了近年来火力发电技术领域的热点。超临界火电机组相较传统的超临界技术具有更高的发电效率、更稳定的工作性能等优点。但由于机组数量的增加和互联互通性的增强,超临界火电机组所面临的控制问题愈加复杂,机组运行状态和能量传输等需求也更加严格。因此,超临界火电机组协调控制及其优化研究日益引起人们的关注。本文主要就该主

超临界火电机组协调控制系统多模型预测控制设计方法.pdf
本发明公开一种基于空间度量算法的超临界火电机组协调控制系统多模型预测控制设计方法,用于超临界燃煤机组机炉协调系统的控制,属于热能动力工程和自动控制领域。目前多数电厂的机炉协调控制系统基于常规PID设计,在大范围变工况运行时,机炉协调被控对象大迟滞、非线性、时变的特性使得协调控制系统性能退化,导致机组在运行过程中出现负荷调节速率低、精度差、主蒸汽压力及汽温波动大等问题。本发明对传统预测控制进行适当简化实现线性预测控制的简化设计,其次结合空间度量算法实现具体子模型的选择,最后针对多个子控制器的综合提出一种计算