
锅炉管道清扫检测攀爬机器人.pdf

思洁****爱吗


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

锅炉管道清扫检测攀爬机器人.pdf
本发明公开了一种锅炉管道清扫检测攀爬机器人,包括机械臂、清扫装置、检测装置和自锁装置;机械臂包括臂主体和臂主体两端的摆动机构,臂主体可伸展收拢,摆动机构能驱动机械臂摆动;清扫装置包括清扫架、清扫组件、驱动组件,清扫组件布置于清扫架内,驱动组件设置于清扫架外向清扫组件提供动力;检测装置包括检测架、检测轨道和检测元件,检测轨道连接于检测架上,检测元件装配于检测轨道上;自锁装置包括主板、主夹具、副夹具和旋转电机,主夹具铰接于主板侧部,旋转电机固接于主板外,副夹具与旋转电机的输出轴相连,主夹具与副夹具围成卡口;自
一种用于管道检测的攀爬机器人.pdf
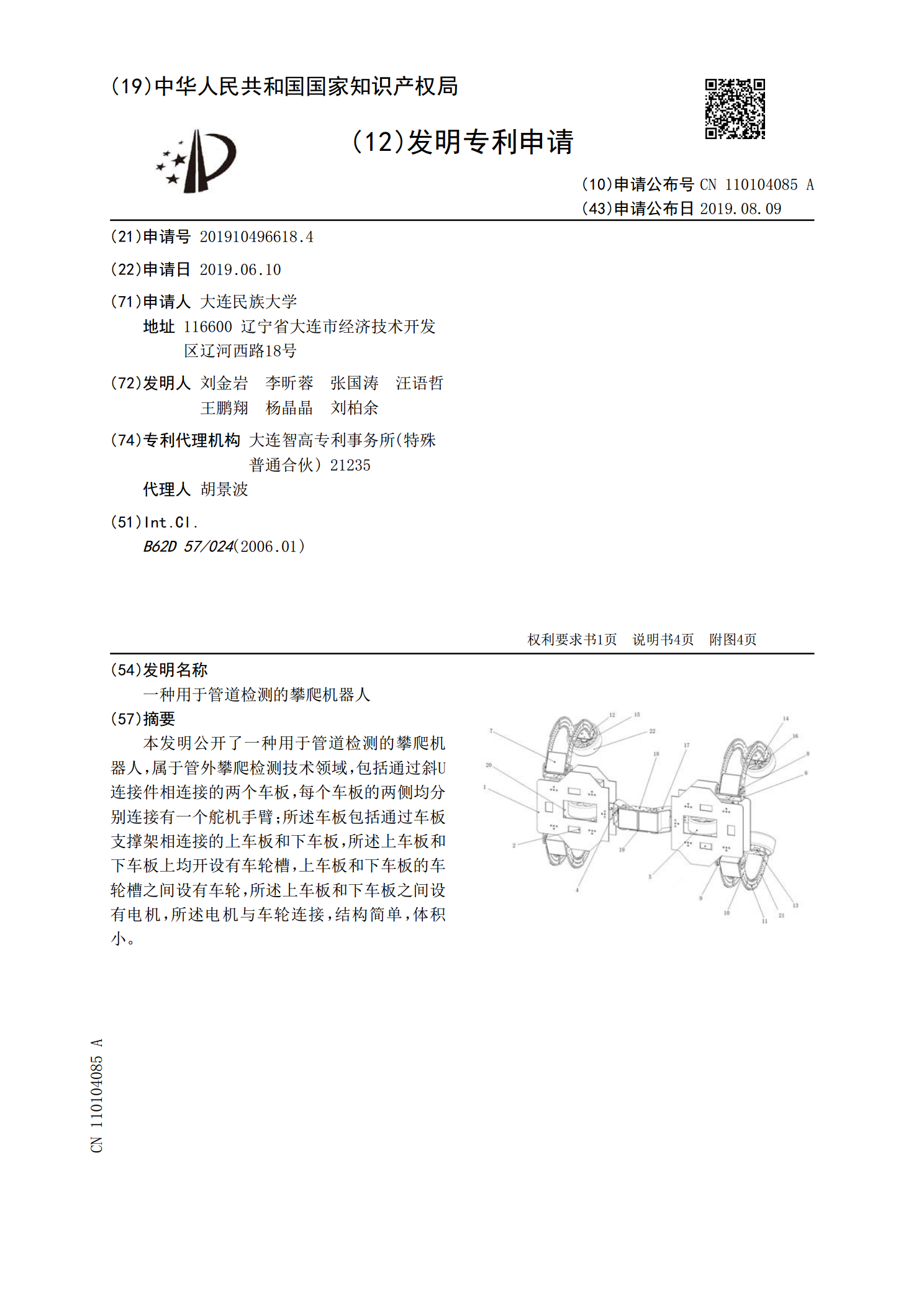
本发明公开了一种用于管道检测的攀爬机器人,属于管外攀爬检测技术领域,包括通过斜U连接件相连接的两个车板,每个车板的两侧均分别连接有一个舵机手臂;所述车板包括通过车板支撑架相连接的上车板和下车板,所述上车板和下车板上均开设有车轮槽,上车板和下车板的车轮槽之间设有车轮,所述上车板和下车板之间设有电机,所述电机与车轮连接,结构简单,体积小。
一种用于管道检测的攀爬机器人.pdf
本发明公开了一种用于管道检测的攀爬机器人,其结构包括安装支架、抱闸机构、摄像机、驱动盒、行走轮,驱动盒两侧安装有四个行走轮,驱动盒顶端面设有安装支架,安装支架和驱动盒通过螺铨锁定,安装支架上安装有摄像机,行走轮和驱动盒之间的驱动主轴上装设有摄像机,本发明通过抱闸机构,在所检测的管道内部泽进行转弯的时候,立即对支脚进行角度锁定,稳定支脚,防止发生触碰的问题,稳定拍摄的主体,本发明抱闸机构的动摩擦片上设有两个以上的凸起,与静摩擦片上相互配合,增加和驱动主轴接触摩擦系数,提高锁定的稳定性,抱闸稳定。

管道内壁攀爬除障机器人.pdf
本发明公开了管道内壁攀爬除障机器人,属于机器人,其结构包括立体支撑底盘、机械手臂和摄像头,所述的摄像头设置在机械手臂上,所述的机械手臂设置在立体支撑底盘的上部,且与立体支撑底盘相连;所述的立体支撑底盘包括主框架、U型槽、支撑板、电机和轮子,所述的主框架为圆筒形结构,所述的U型槽包括6个,两个一组,共形成三对,每组U型槽沿主框架圆周面上下设置,三对U型槽分别沿主框架圆周方向均匀设置,每个U型槽的外端部两内侧分别设置有支撑板,两支撑板的末端之间连接有电机,电机与减速机相连,减速机的两端输出轴分别连接有轮子。本

一种柱体攀爬清扫机器人.pdf
本发明公开的一种柱体攀爬清扫机器人,包括机器人主体,所述机器人主体由多组清洁主动小车、多组行走小车及车体连接桥机构组成;所述清洁主动小车及行走小车均设置有车体,所述清洁主动小车上安装有清洁机构,所述行走小车上安装有行驶机构,其中所述清洁机构包括清洁摇杆、连接所述清洁摇杆的连锁弹簧单元及套设于所述清洁摇杆上的清洁头,所述行驶机构包括左右对称设置的多组滚轮、步进电动机、行驶弹簧压紧单元及PLC控制模块,所述车体连接桥将所述清洁主动小车及所述行走小车连接起来。本发明通过摇杆和小车行驻的配合达到擦拭污渍的目的,成