
一种超超临界机组协调控制系统的控制优化方法.pdf

美丽****ka


1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种超超临界机组协调控制系统的控制优化方法.pdf
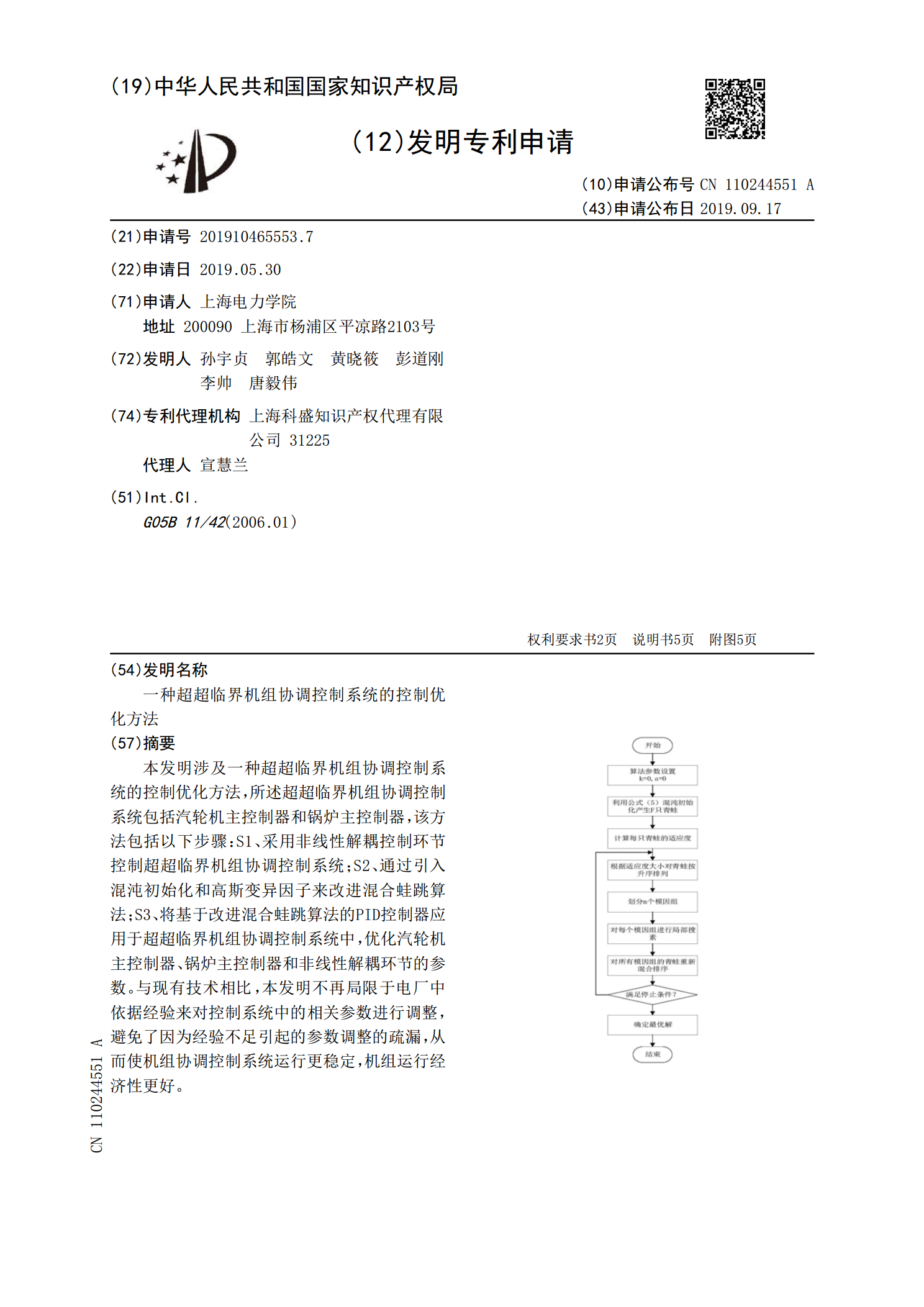
本发明涉及一种超超临界机组协调控制系统的控制优化方法,所述超超临界机组协调控制系统包括汽轮机主控制器和锅炉主控制器,该方法包括以下步骤:S1、采用非线性解耦控制环节控制超超临界机组协调控制系统;S2、通过引入混沌初始化和高斯变异因子来改进混合蛙跳算法;S3、将基于改进混合蛙跳算法的PID控制器应用于超超临界机组协调控制系统中,优化汽轮机主控制器、锅炉主控制器和非线性解耦环节的参数。与现有技术相比,本发明不再局限于电厂中依据经验来对控制系统中的相关参数进行调整,避免了因为经验不足引起的参数调整的疏漏,从而使
一种超超临界机组协调控制系统的解耦控制方法.pdf
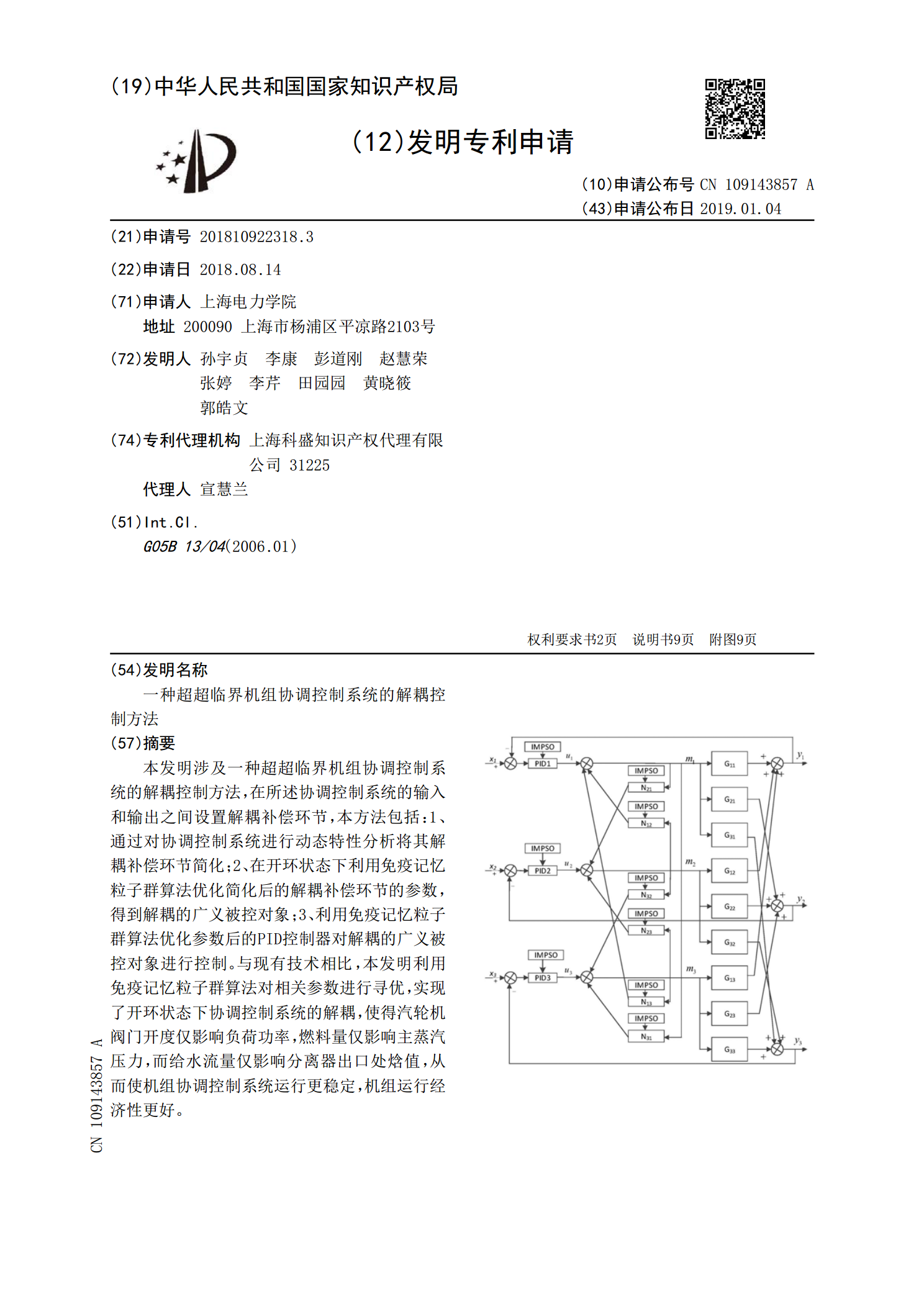
本发明涉及一种超超临界机组协调控制系统的解耦控制方法,在所述协调控制系统的输入和输出之间设置解耦补偿环节,本方法包括:1、通过对协调控制系统进行动态特性分析将其解耦补偿环节简化;2、在开环状态下利用免疫记忆粒子群算法优化简化后的解耦补偿环节的参数,得到解耦的广义被控对象;3、利用免疫记忆粒子群算法优化参数后的PID控制器对解耦的广义被控对象进行控制。与现有技术相比,本发明利用免疫记忆粒子群算法对相关参数进行寻优,实现了开环状态下协调控制系统的解耦,使得汽轮机阀门开度仅影响负荷功率,燃料量仅影响主蒸汽压力,

超超临界机组协调控制系统先进控制方法研究的开题报告.docx
超超临界机组协调控制系统先进控制方法研究的开题报告一、选题背景及意义随着电力工业的不断发展,超超临界机组已经成为国内外国力工业领域的重点发展对象。在超超临界机组的运行过程中,协调控制系统是非常重要的组成部分。因此,本课题旨在研究超超临界机组协调控制系统的先进控制方法,以提高机组的运行效率和运行稳定性,提高电网的可靠性和供电质量。二、国内外研究现状目前,超超临界机组协调控制系统的研究主要集中在模型预测控制、模糊控制、神经网络控制、遗传算法控制等方面。国内外很多学者在这方面进行了探索和研究,取得了一定的进展和

超超临界机组协调控制系统先进控制方法研究的中期报告.docx
超超临界机组协调控制系统先进控制方法研究的中期报告一、研究背景和意义超超临界机组协调控制系统是一种新型的热电联产系统,具有高效、环保和经济的优点。然而,由于其较为复杂的系统结构和控制策略,使得其建模和设计具有一定的难度。因此,需要对超超临界机组协调控制系统进行研究,探索先进的控制方法,从而提高系统的性能和稳定性。本文旨在对超超临界机组协调控制系统先进控制方法的研究进行中期报告,介绍目前已有的研究成果,探究未来的研究方向,为该领域的研究提供借鉴。二、研究现状1.超超临界机组建模超超临界机组是一种非线性、耦合

超临界机组特性建模与协调控制系统优化的中期报告.docx
超临界机组特性建模与协调控制系统优化的中期报告本项目旨在研究超临界机组的特性建模和协调控制系统的优化,以提高其整体性能和稳定性。本文是中期报告,主要介绍项目的进展情况和下一步的计划。一、研究进展1.超临界机组特性建模通过文献调研和实验数据分析,我们对超临界机组的特性进行了建模。首先,我们建立了机组的基本数学模型,包括主汽道、再热器、汽轮机、发电机等子系统的模型。然后,我们考虑了机组各子系统之间的相互影响关系,建立了整个机组的集成模型。最后,我们根据实验数据对模型进行了验证和优化。2.协调控制系统优化我们在