
全自动硅铁出炉系统及硅铁出炉机器人.pdf

音景****ka

1/10
2/10

3/10
4/10
5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

全自动硅铁出炉系统及硅铁出炉机器人.pdf
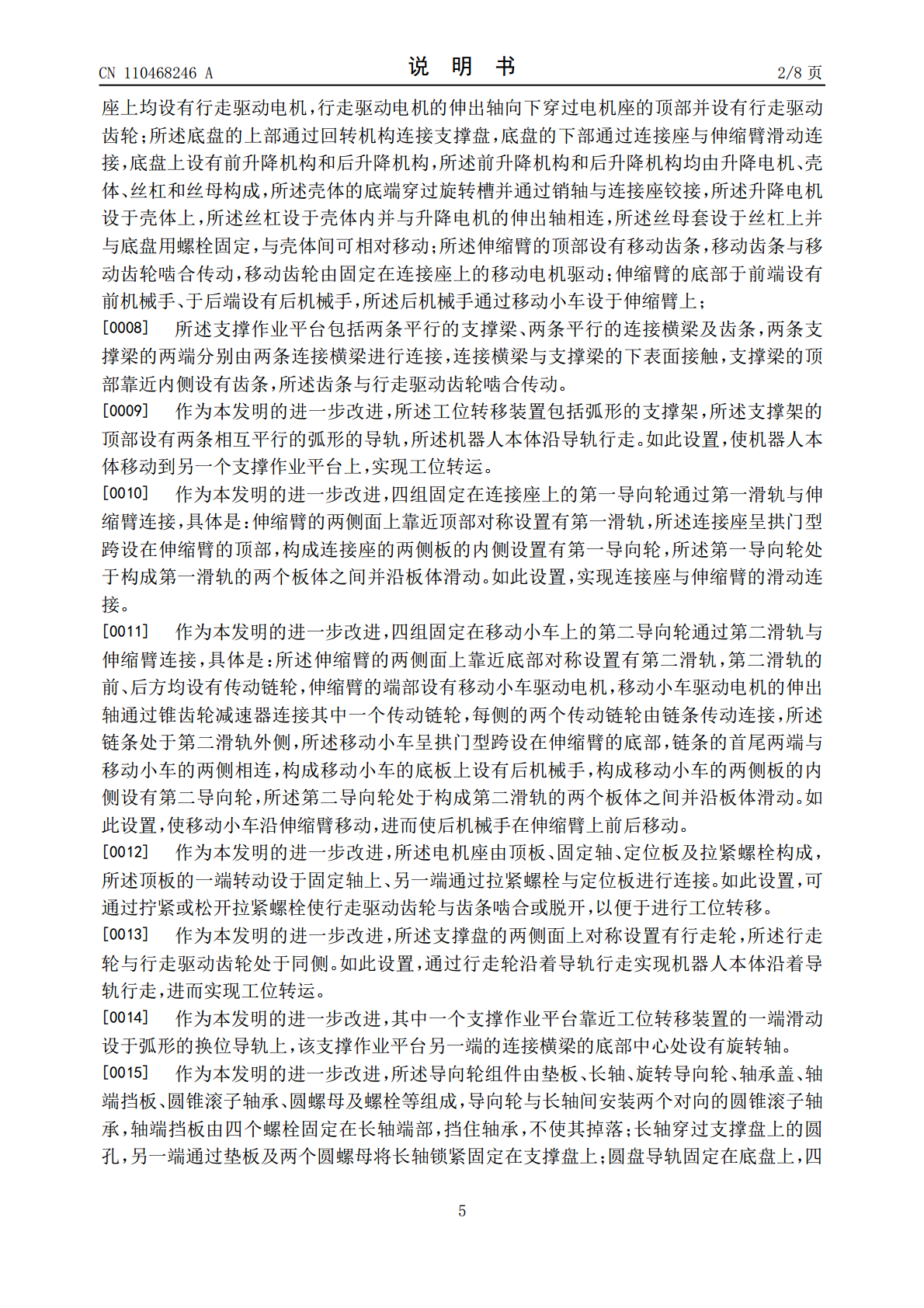
一种全自动硅铁出炉系统及硅铁出炉机器人,属于冶金设备领域,该系统包括机器人本体、支撑作业平台、工具架及工位转移装置,支撑作业平台为两个,每个支撑作业平台旁均设有工具架,两个支撑作业平台之间设有工位转移装置,工位转移装置环绕在硅铁炉的出炉口旁,机器人本体设置在支撑作业平台上,且机器人本体可沿工位转移装置行走。该机器人的移动大车包括支撑盘、回转机构和底盘,底盘的上部通过回转机构连接支撑盘,底盘的下部通过连接座与伸缩臂滑动连接。本发明可适应多个出炉口,便于机器人本体转换工位为不同的出炉口进行出炉作业,其中的工具

全自动硅铁出炉系统及硅铁出炉机器人.pdf
一种全自动硅铁出炉系统及硅铁出炉机器人,属于冶金设备领域,该系统包括机器人本体、支撑作业平台、工具架及工位转移装置,支撑作业平台为两个,每个支撑作业平台旁均设有工具架,两个支撑作业平台之间设有工位转移装置,工位转移装置环绕在硅铁炉的出炉口旁,机器人本体设置在支撑作业平台上,且机器人本体可沿工位转移装置行走。该机器人的移动大车包括支撑盘、回转机构和底盘,底盘的上部通过回转机构连接支撑盘,底盘的下部通过连接座与伸缩臂滑动连接。本发明可适应多个出炉口,便于机器人本体转换工位为不同的出炉口进行出炉作业,其中的工具

一种硅铁出炉机器人工位切换转运方法.pdf
一种硅铁出炉机器人工位切换转运方法,属于冶金设备领域,其技术要点是:先使得伸缩臂保持与转移方向平行;再将硅铁出炉机器人移动至支撑作业平台的最右端,将两个行走驱动齿轮与齿条脱开;将硅铁出炉机器人安装到工位转换装置上;将同侧的另一个支撑作业平台的前端沿着换位导轨旋转至与工位转移装置相接;推动硅铁出炉机器人沿着弧形导轨移动至另一个支撑作业平台的最左端;再将两个行走驱动齿轮与齿条啮合,将支撑作业平台旋转至工作位,完成工位切换转运。本发明可适应多个出炉口,便于机器人本体转换工位为不同的出炉口进行出炉作业,其中的工具
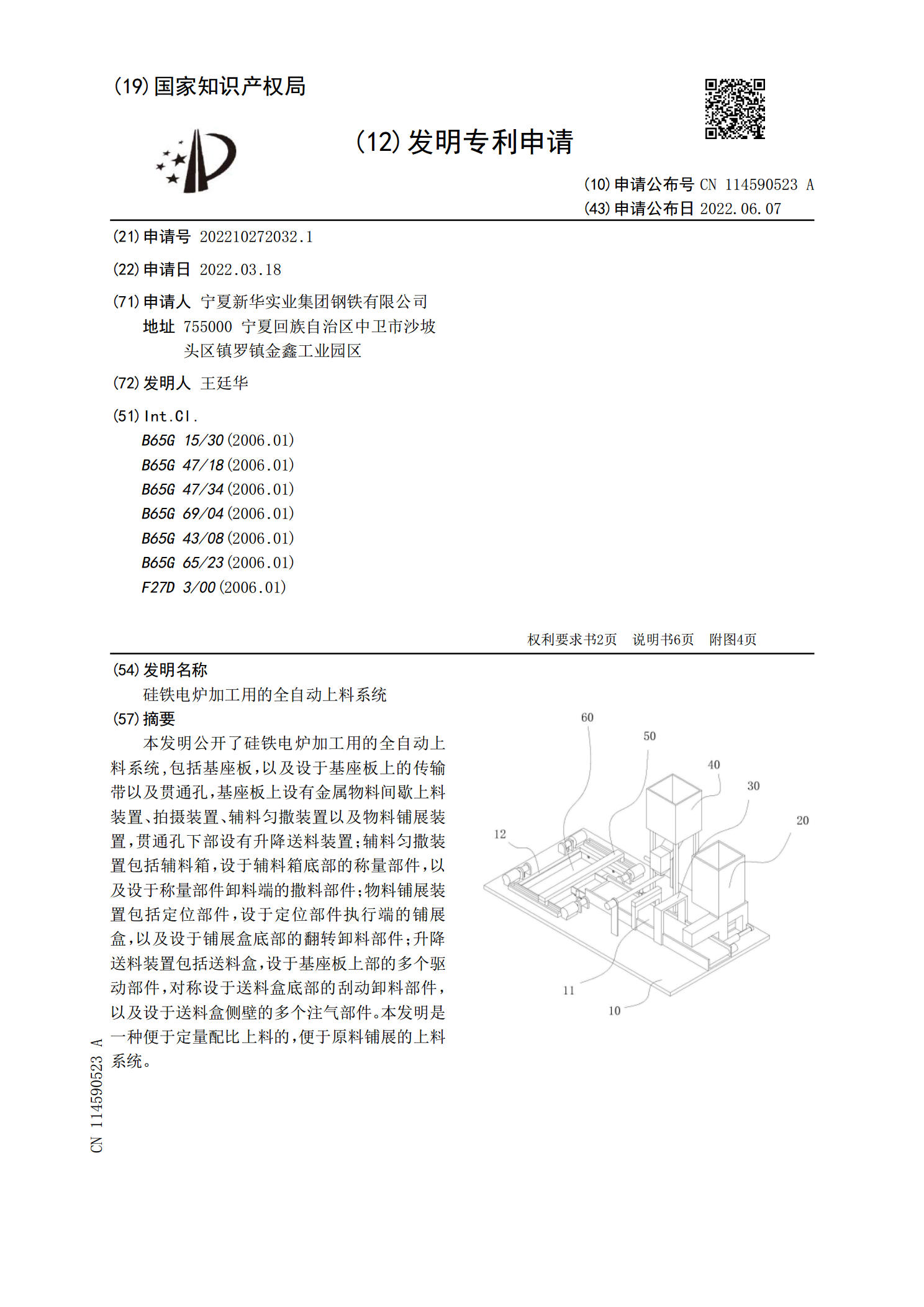
硅铁电炉加工用的全自动上料系统.pdf
本发明公开了硅铁电炉加工用的全自动上料系统,包括基座板,以及设于基座板上的传输带以及贯通孔,基座板上设有金属物料间歇上料装置、拍摄装置、辅料匀撒装置以及物料铺展装置,贯通孔下部设有升降送料装置;辅料匀撒装置包括辅料箱,设于辅料箱底部的称量部件,以及设于称量部件卸料端的撒料部件;物料铺展装置包括定位部件,设于定位部件执行端的铺展盒,以及设于铺展盒底部的翻转卸料部件;升降送料装置包括送料盒,设于基座板上部的多个驱动部件,对称设于送料盒底部的刮动卸料部件,以及设于送料盒侧壁的多个注气部件。本发明是一种便于定量配
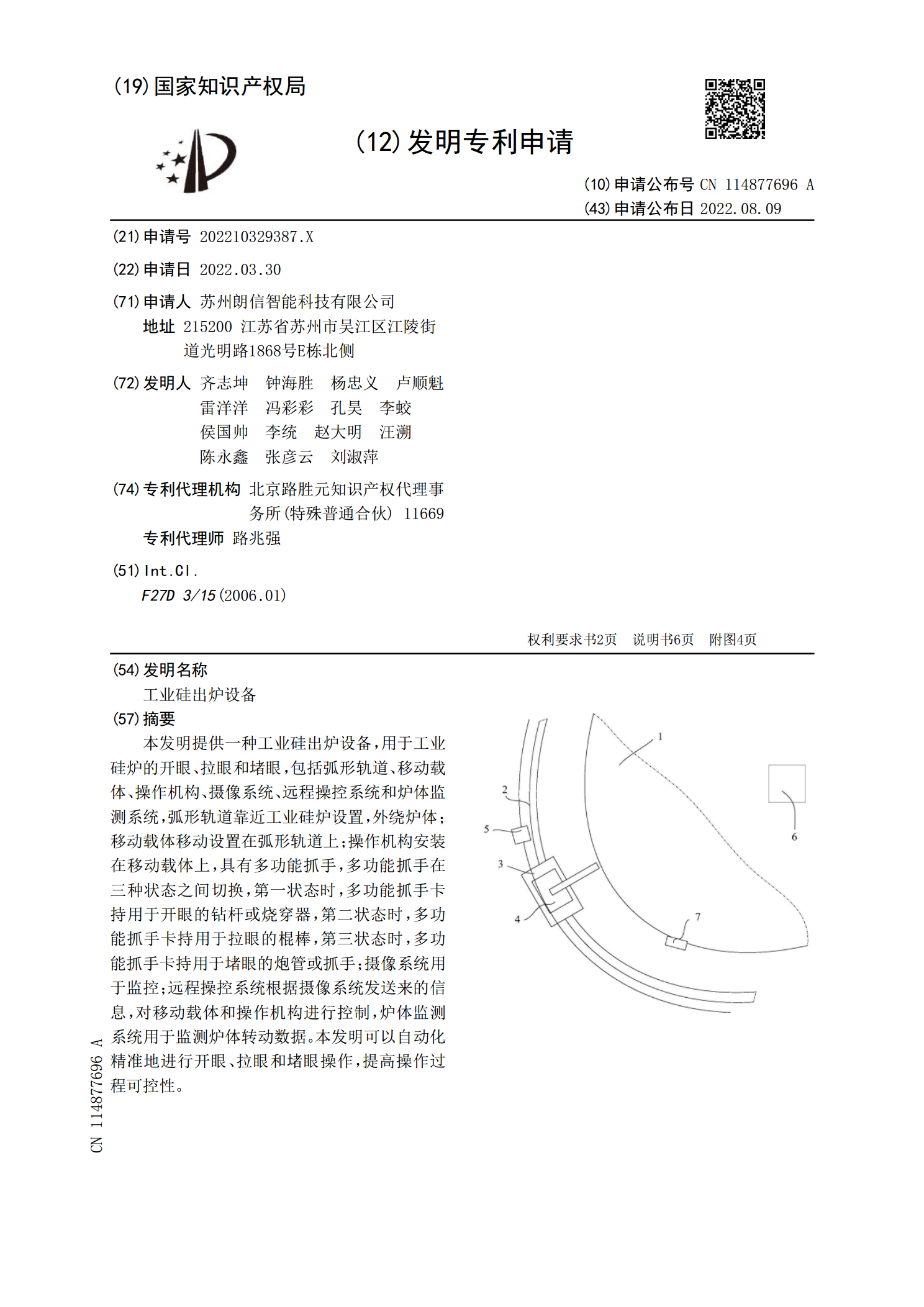
工业硅出炉设备.pdf
本发明提供一种工业硅出炉设备,用于工业硅炉的开眼、拉眼和堵眼,包括弧形轨道、移动载体、操作机构、摄像系统、远程操控系统和炉体监测系统,弧形轨道靠近工业硅炉设置,外绕炉体;移动载体移动设置在弧形轨道上;操作机构安装在移动载体上,具有多功能抓手,多功能抓手在三种状态之间切换,第一状态时,多功能抓手卡持用于开眼的钻杆或烧穿器,第二状态时,多功能抓手卡持用于拉眼的棍棒,第三状态时,多功能抓手卡持用于堵眼的炮管或抓手;摄像系统用于监控;远程操控系统根据摄像系统发送来的信息,对移动载体和操作机构进行控制,炉体监测系统