
龙门式耐火砖堆码机器人.pdf

是你****馨呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
龙门式耐火砖堆码机器人.pdf
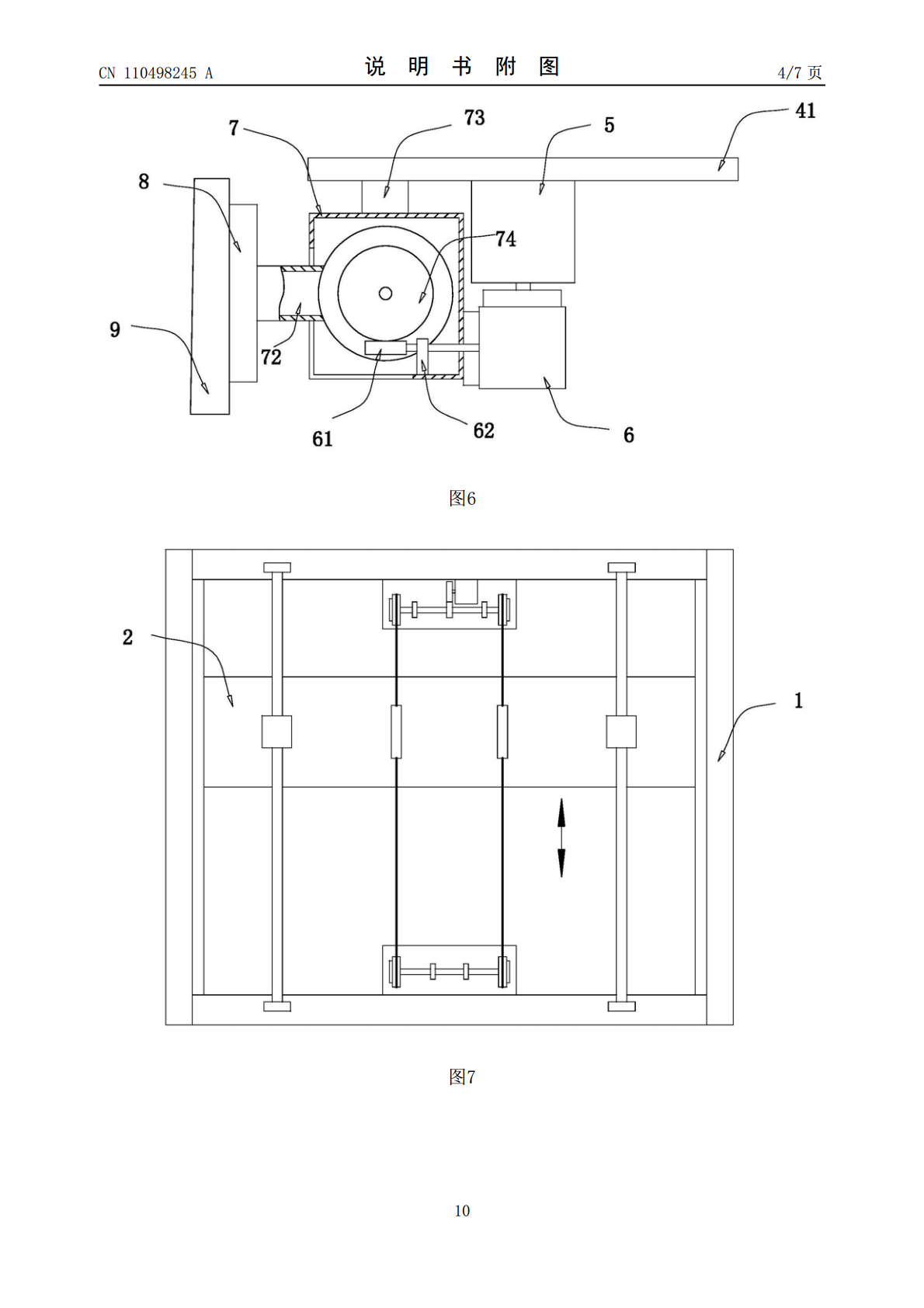
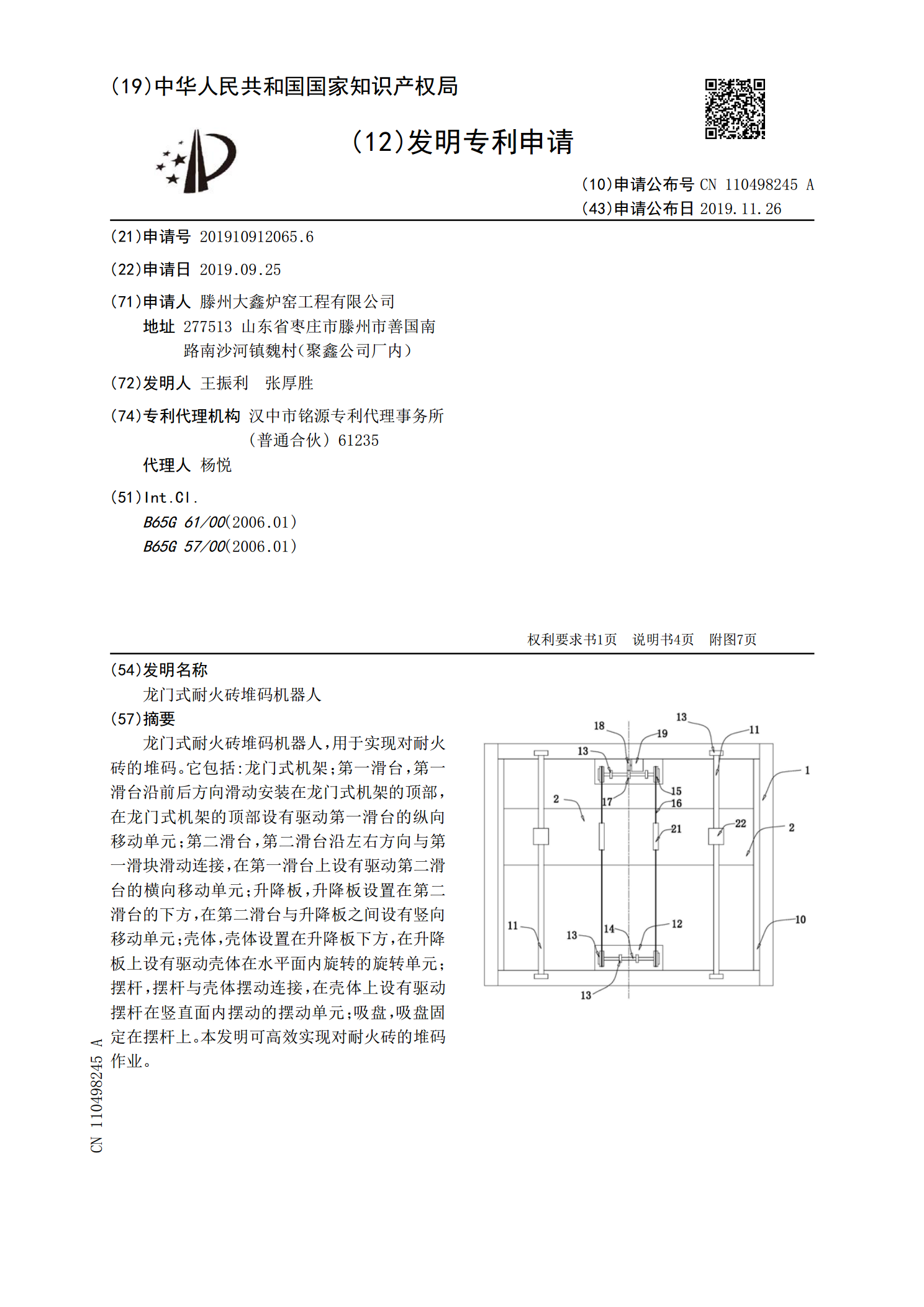
龙门式耐火砖堆码机器人,用于实现对耐火砖的堆码。它包括:龙门式机架;第一滑台,第一滑台沿前后方向滑动安装在龙门式机架的顶部,在龙门式机架的顶部设有驱动第一滑台的纵向移动单元;第二滑台,第二滑台沿左右方向与第一滑块滑动连接,在第一滑台上设有驱动第二滑台的横向移动单元;升降板,升降板设置在第二滑台的下方,在第二滑台与升降板之间设有竖向移动单元;壳体,壳体设置在升降板下方,在升降板上设有驱动壳体在水平面内旋转的旋转单元;摆杆,摆杆与壳体摆动连接,在壳体上设有驱动摆杆在竖直面内摆动的摆动单元;吸盘,吸盘固定在摆杆

耐火砖堆码装置.pdf
耐火砖堆码装置,用于方便实现对耐火砖的堆码,并便于工人在水泥窑内进行贴砖作业。包括导轨,在所述导轨上设有一对平行设置的第一轨道槽,在两第一轨道槽之间设有四条平行设置的延伸轨道槽,且延伸轨道槽与第一轨道槽垂直设置,在导轨上还设有四条平行设置的第二轨道槽,第二轨道槽与延伸轨道槽共线设置且连通;砖箱,所述砖箱包括底座、设置在底座底部的四个行走轮、可拆卸的设置在底座顶部的挡板,在底座上设有一对用于叉车货叉插入的插槽,行走轮可以相对底座在水平面内旋转,挡板至少设置有两块,砖箱上方放置耐火砖后将砖箱放置在导轨上。本发

一种龙门式C型钢平移堆码系统.pdf
本发明涉及一种龙门式C型钢平移堆码系统,其特征在于:包括输送装置、龙门式横移装置、翻转夹持装置、堆码托举装置;包括两条所述输送装置,所述两条输送装置的首尾之间具有空隙;所述输送装置包括输送架、输送辊和输送驱动电机;所述龙门式横移装置包括龙门架、水平滑轨、横移滚子、横移驱动电机和横移滑车;所述翻转夹持装置位于所述两条输送装置的空隙处,所述翻转夹持装置包括支架、转架、第一顶紧气缸、第二顶紧气缸、第三顶紧气缸、勾压气缸、L形勾压板、放料架、放料气缸、翻转驱动电机;所述堆码托举装置包括沉槽、托举液压缸、托杆、滚轮
智能穿梭堆码机器人.pdf
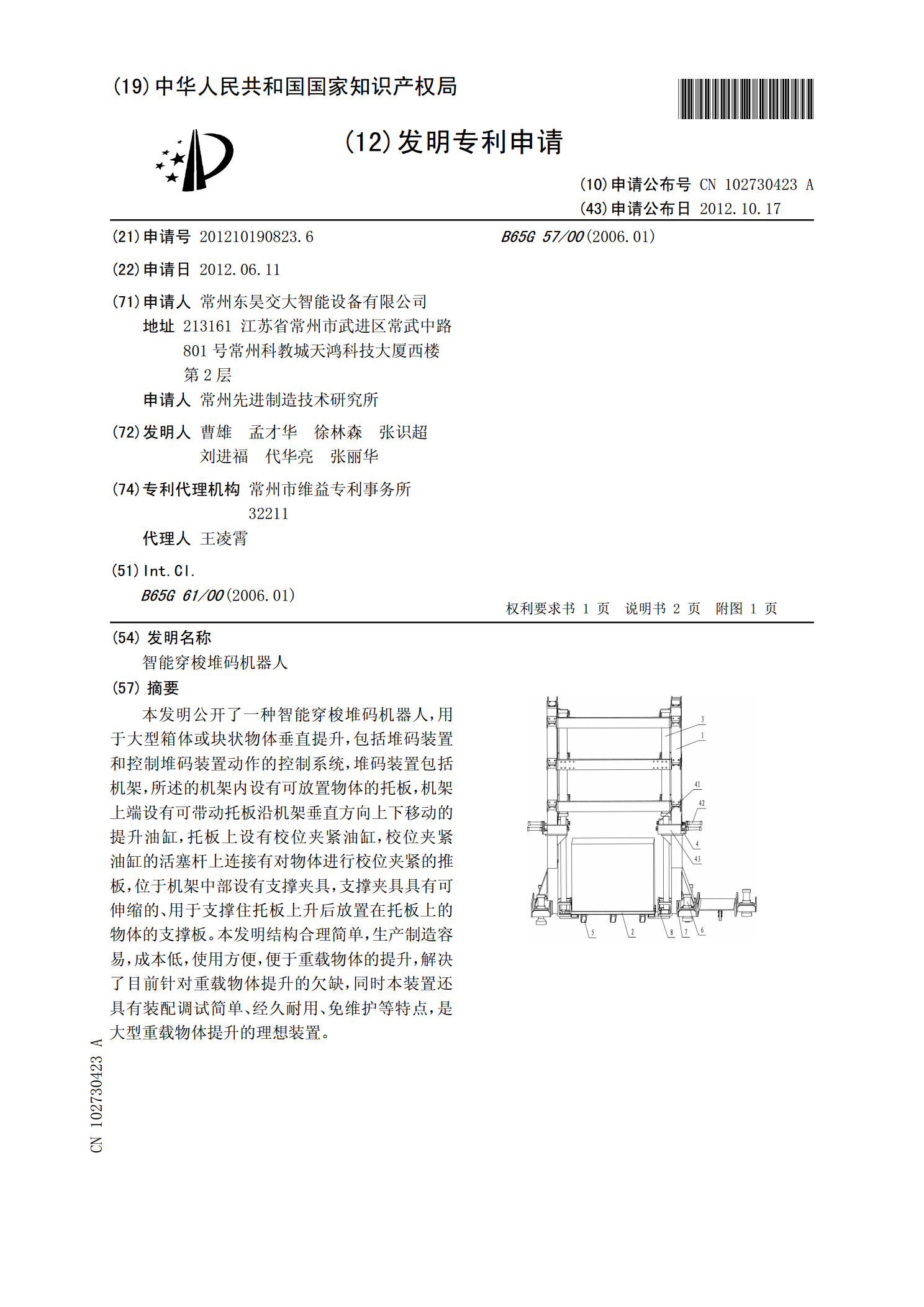
本发明公开了一种智能穿梭堆码机器人,用于大型箱体或块状物体垂直提升,包括堆码装置和控制堆码装置动作的控制系统,堆码装置包括机架,所述的机架内设有可放置物体的托板,机架上端设有可带动托板沿机架垂直方向上下移动的提升油缸,托板上设有校位夹紧油缸,校位夹紧油缸的活塞杆上连接有对物体进行校位夹紧的推板,位于机架中部设有支撑夹具,支撑夹具具有可伸缩的、用于支撑住托板上升后放置在托板上的物体的支撑板。本发明结构合理简单,生产制造容易,成本低,使用方便,便于重载物体的提升,解决了目前针对重载物体提升的欠缺,同时本装置还

压缝式堆码.docx
典型任务一压缝式堆码实训任务目标1.能够通过多媒体演示让学生认识货品压缝式堆码方式;2.能够根据实际要求、货品数量、包装规格和堆垛要求设计合理的堆码方式;3.能够在规定时间独立完成规定箱式货品压缝式堆码作业。教学条件教学方法任务驱动教学法教学手段多媒体演示、小组讨论、实训室模拟教学环境硬件环境物流综合实训室、托盘、模拟货品、工牌(其中理货员1个)软件环境工作页教学准备满足25人教学所需要:任务书1份;模拟货品140箱。组织形式小组合作,5人一组,集中学习、轮流实训,理实一体。描述:以小组学习为主,任务驱动