
一种余热锅炉汽包水位全程自动控制的方法.pdf

努力****承悦


1/10

2/10
3/10
4/10
5/10

6/10

7/10
8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种余热锅炉汽包水位全程自动控制的方法.pdf
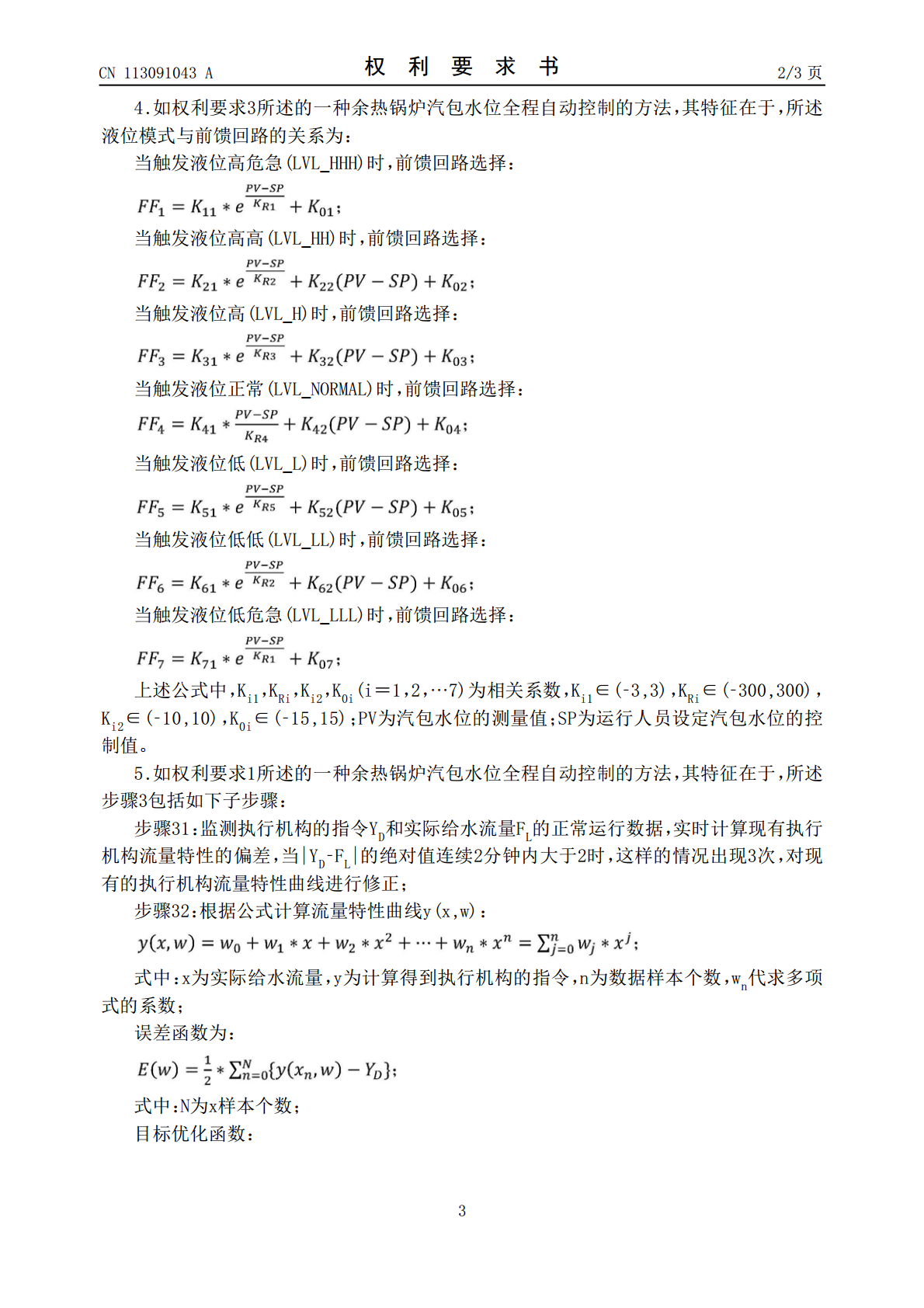
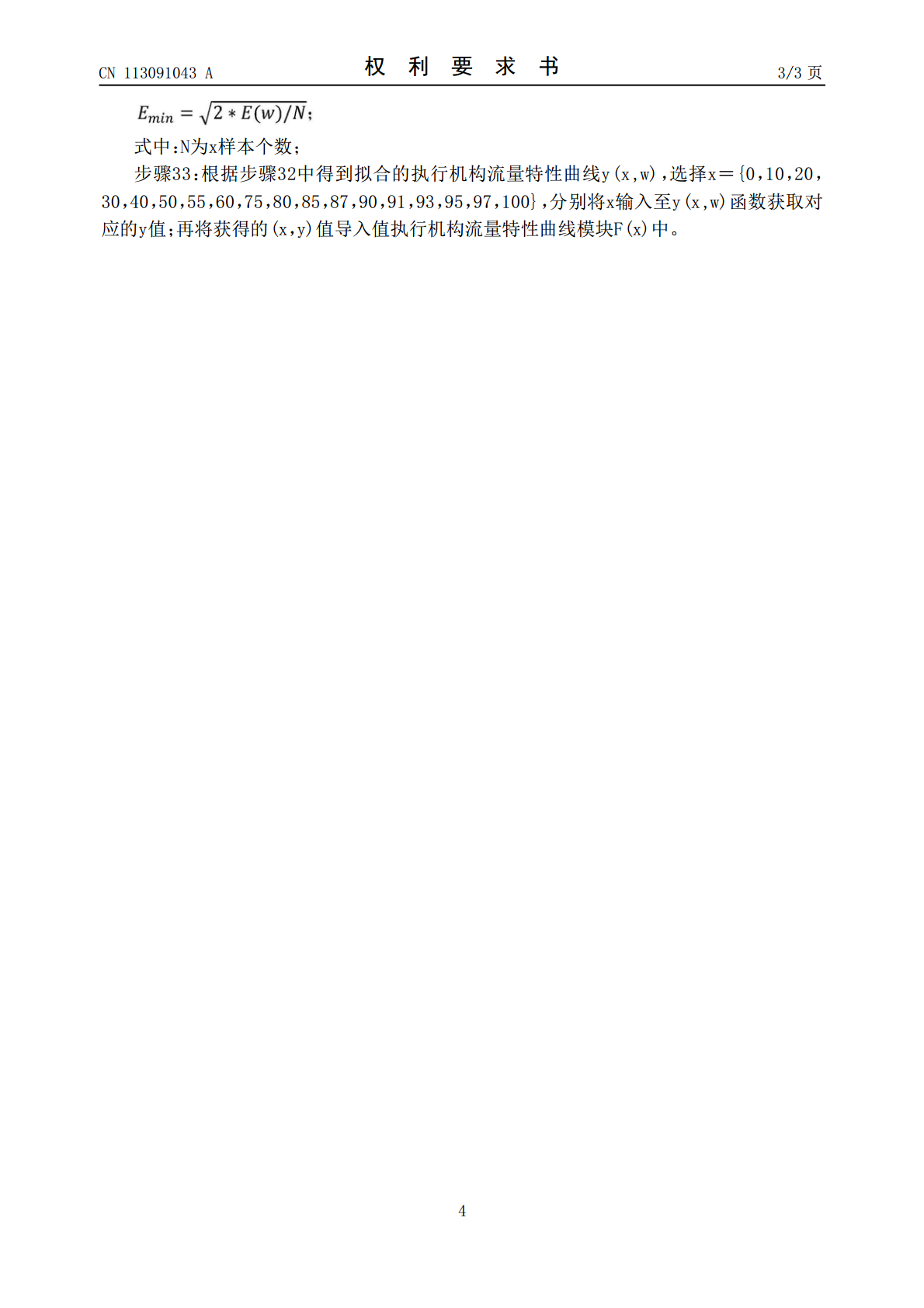
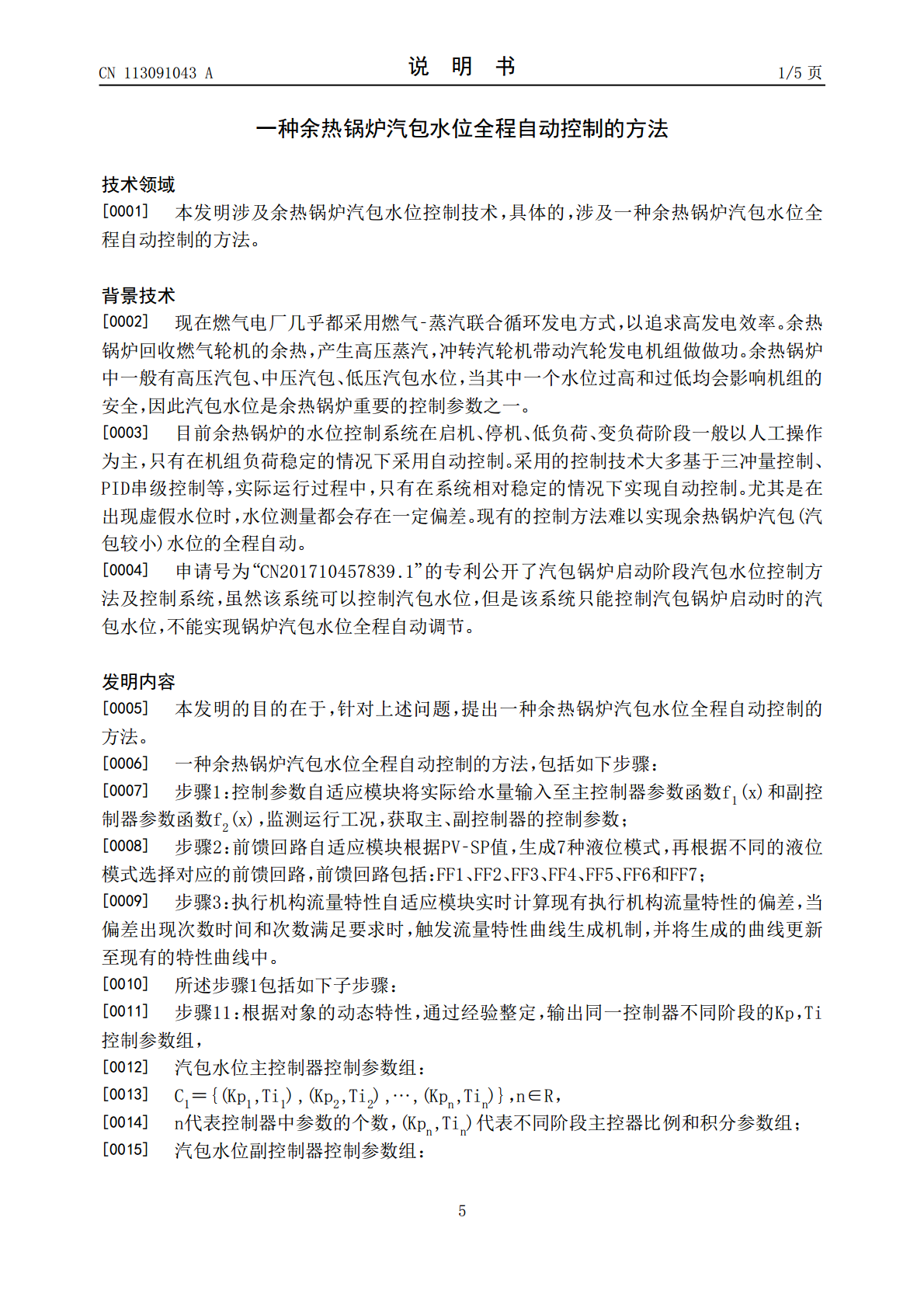
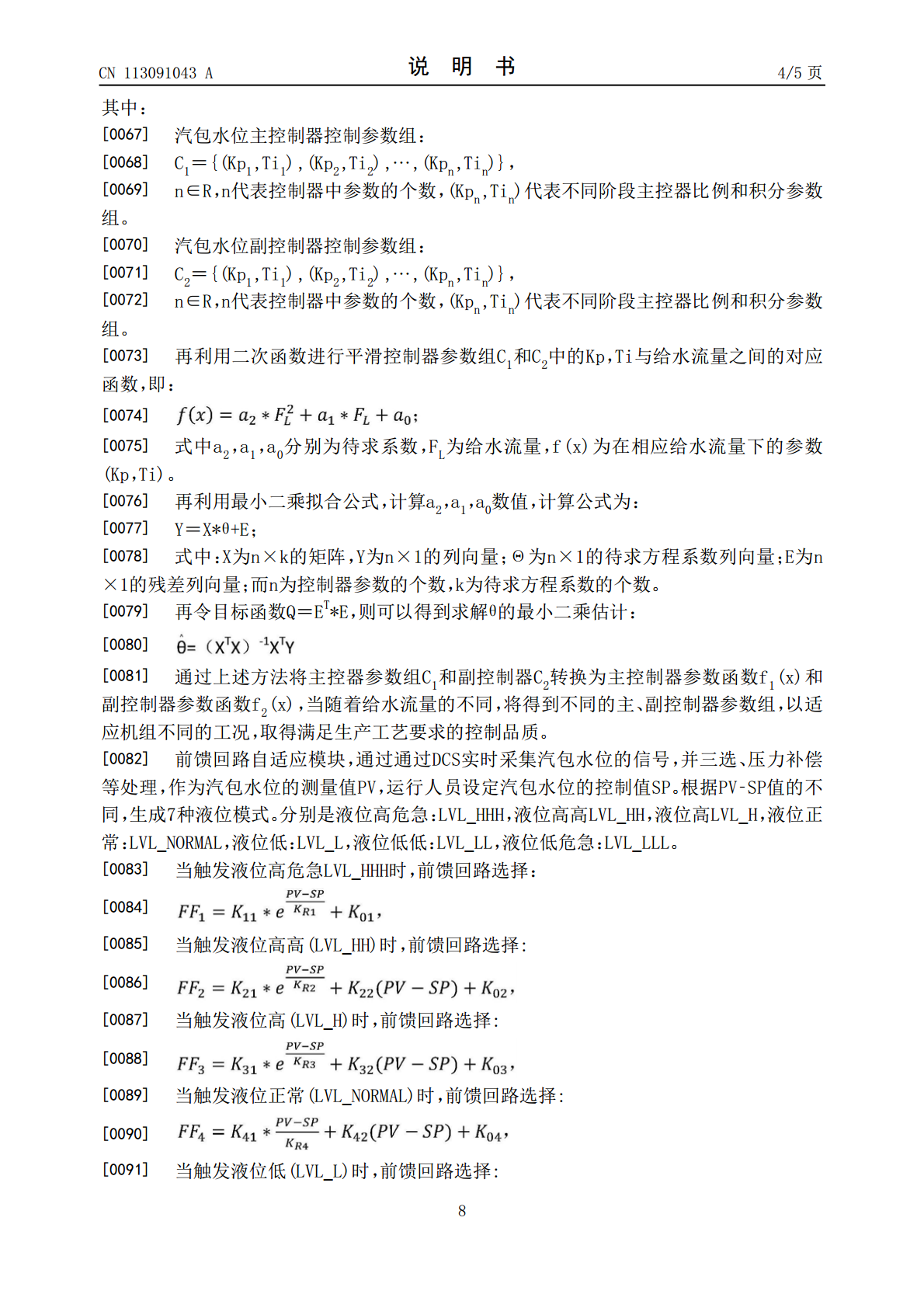
本发明公开了一种余热锅炉汽包水位全程自动控制的方法,涉及余热锅炉汽包水位控制技术,该方法步骤包括:步骤1:控制参数自适应模块将实际给水量输入至主控制器参数函数f

大容量锅炉汽包水位的全程自动控制.docx
大容量锅炉汽包水位的全程自动控制摘要:介绍大容量锅炉的水位全程自动控制的必要性及汽包水位全程自动控制的概念、功能及其组成并详细说明各组成部分控制过程。关键词:锅炉水位自动控制中图分类号:TP273文献标识码:A文章编号:1007-3973(2013)009-018-03锅炉汽包水位是锅炉运行的重要指标之一维持汽包水位在一定的范围内是保证锅炉安全运行的首要条件。锅炉汽包水位过高或过低都会直接或间接的影响机组运行的安全性和经济性甚至造成更加
大容量锅炉汽包水位的全程自动控制.docx
大容量锅炉汽包水位的全程自动控制摘要:介绍大容量锅炉的水位全程自动控制的必要性及汽包水位全程自动控制的概念、功能及其组成并详细说明各组成部分控制过程。关键词:锅炉水位自动控制中图分类号:TP273文献标识码:A文章编号:1007-3973(2013)009-018-03锅炉汽包水位是锅炉运行的重要指标之一维持汽包水位在一定的范围内是保证锅炉安全运行的首要条件。锅炉汽包水位过高或过低都会直接或间接的影响机组运行的安全性和经济性甚至造成更加
余热锅炉汽包水位的三冲量控制方法.pdf
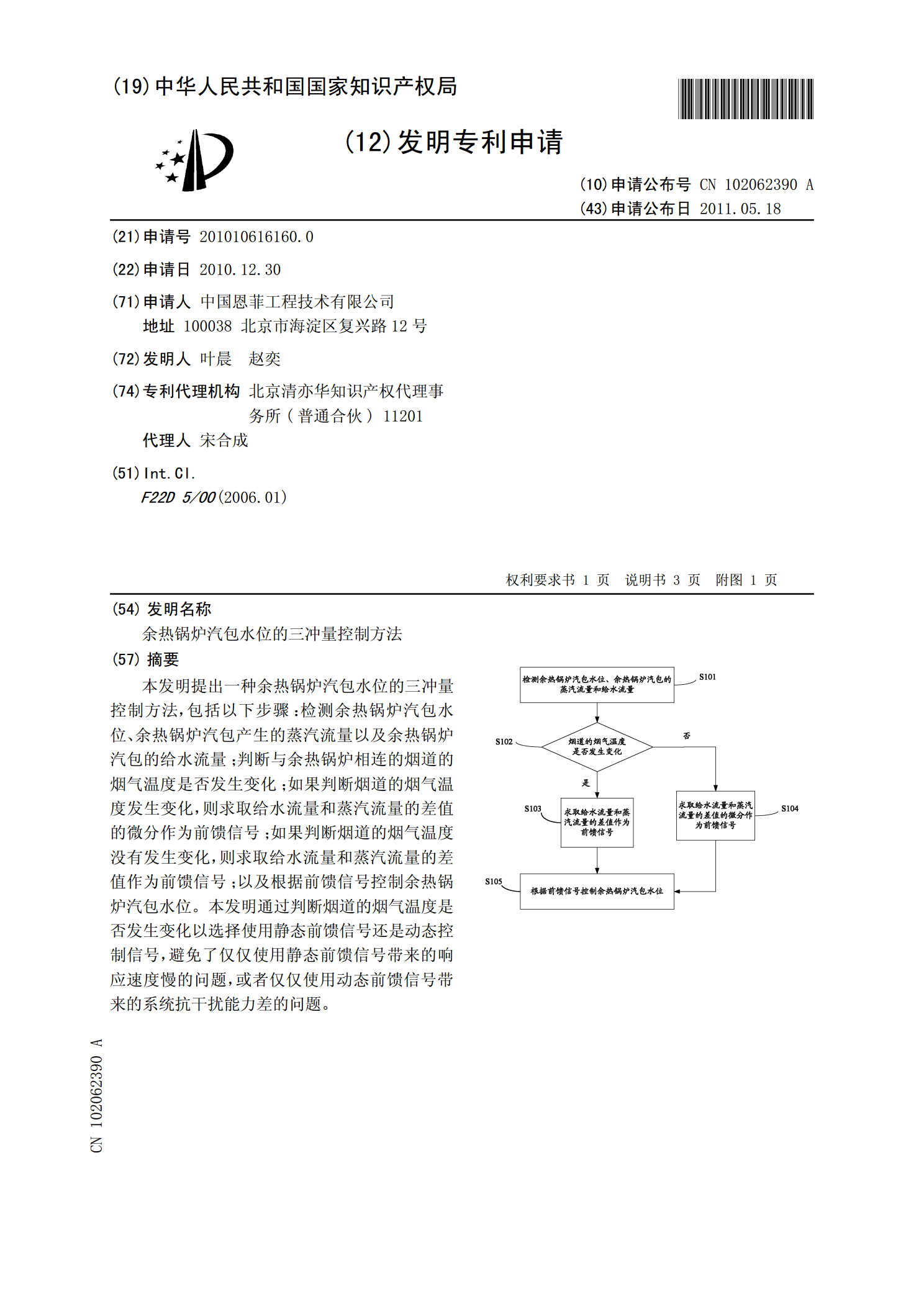
本发明提出一种余热锅炉汽包水位的三冲量控制方法,包括以下步骤:检测余热锅炉汽包水位、余热锅炉汽包产生的蒸汽流量以及余热锅炉汽包的给水流量;判断与余热锅炉相连的烟道的烟气温度是否发生变化;如果判断烟道的烟气温度发生变化,则求取给水流量和蒸汽流量的差值的微分作为前馈信号;如果判断烟道的烟气温度没有发生变化,则求取给水流量和蒸汽流量的差值作为前馈信号;以及根据前馈信号控制余热锅炉汽包水位。本发明通过判断烟道的烟气温度是否发生变化以选择使用静态前馈信号还是动态控制信号,避免了仅仅使用静态前馈信号带来的响应速度慢的
一种余热锅炉汽包水位控制系统.pdf
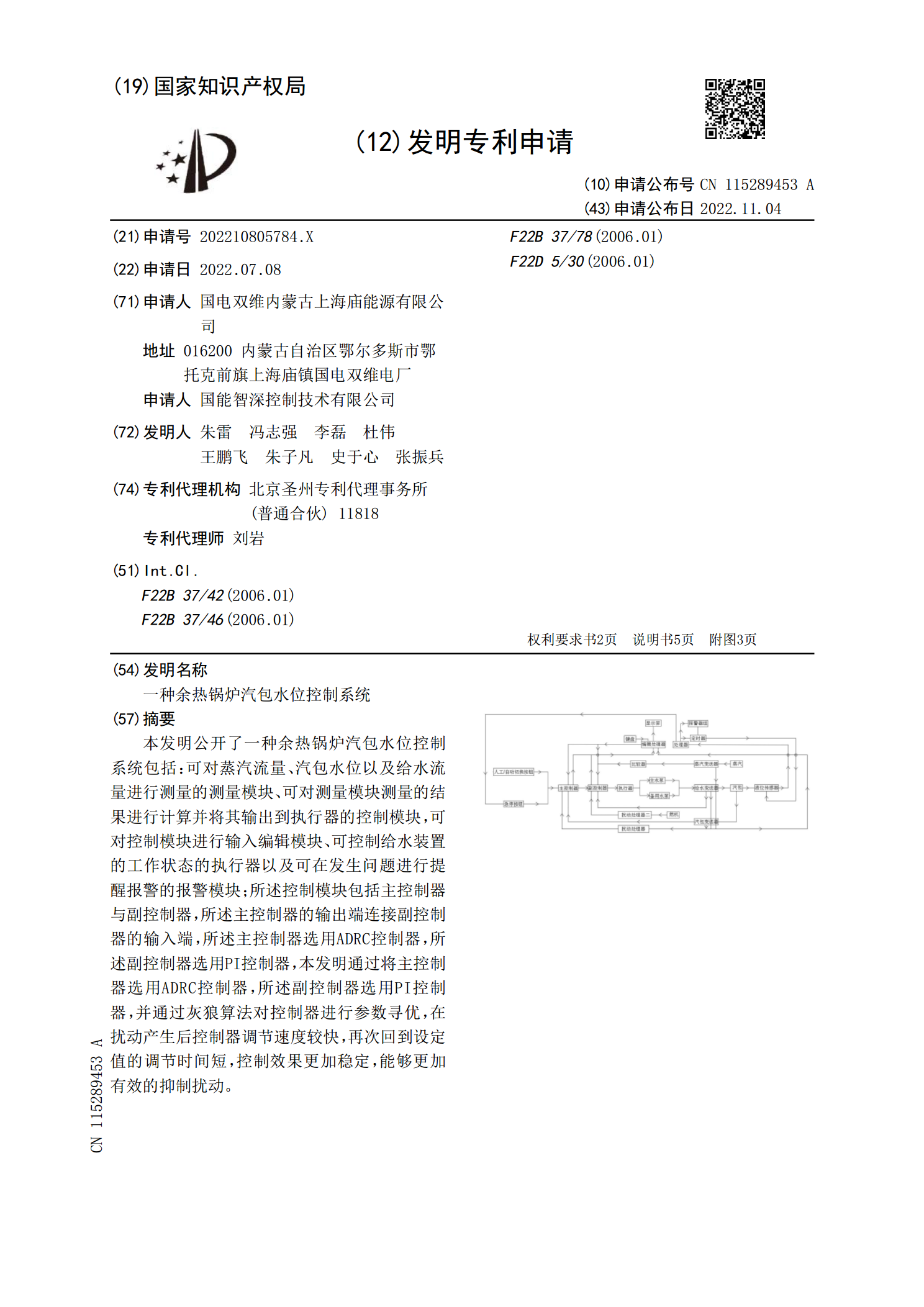
本发明公开了一种余热锅炉汽包水位控制系统包括:可对蒸汽流量、汽包水位以及给水流量进行测量的测量模块、可对测量模块测量的结果进行计算并将其输出到执行器的控制模块,可对控制模块进行输入编辑模块、可控制给水装置的工作状态的执行器以及可在发生问题进行提醒报警的报警模块;所述控制模块包括主控制器与副控制器,所述主控制器的输出端连接副控制器的输入端,所述主控制器选用ADRC控制器,所述副控制器选用PI控制器,本发明通过将主控制器选用ADRC控制器,所述副控制器选用PI控制器,并通过灰狼算法对控制器进行参数寻优,在扰动