
一种焦炉炉顶测温孔智能测温机器人及测温方法.pdf

一吃****仕龙

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种焦炉炉顶测温孔智能测温机器人及测温方法.pdf
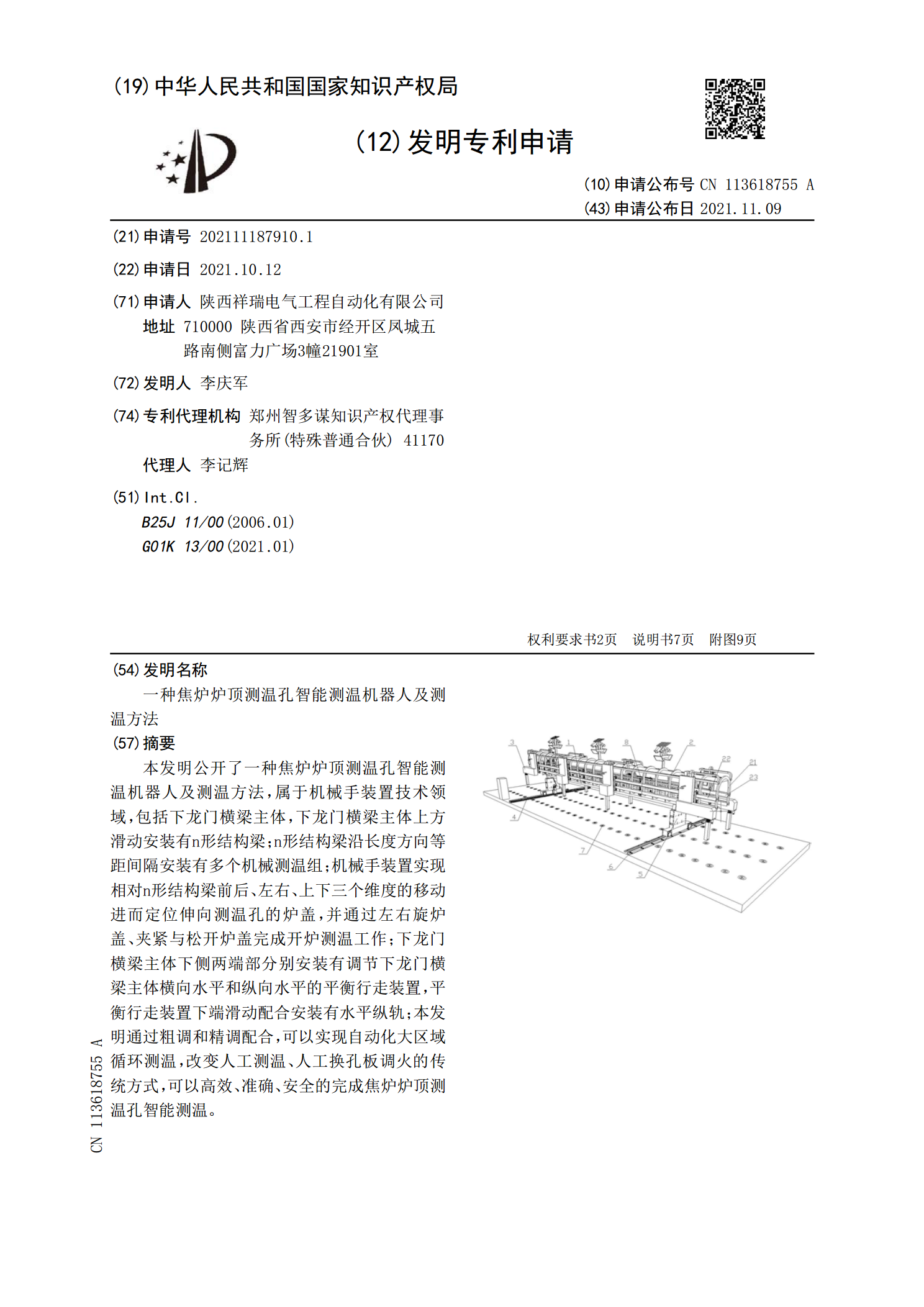
本发明公开了一种焦炉炉顶测温孔智能测温机器人及测温方法,属于机械手装置技术领域,包括下龙门横梁主体,下龙门横梁主体上方滑动安装有n形结构梁;n形结构梁沿长度方向等距间隔安装有多个机械测温组;机械手装置实现相对n形结构梁前后、左右、上下三个维度的移动进而定位伸向测温孔的炉盖,并通过左右旋炉盖、夹紧与松开炉盖完成开炉测温工作;下龙门横梁主体下侧两端部分别安装有调节下龙门横梁主体横向水平和纵向水平的平衡行走装置,平衡行走装置下端滑动配合安装有水平纵轨;本发明通过粗调和精调配合,可以实现自动化大区域循环测温,改变
一种智能焦炉直行测温机器人系统及测温控制方法.pdf
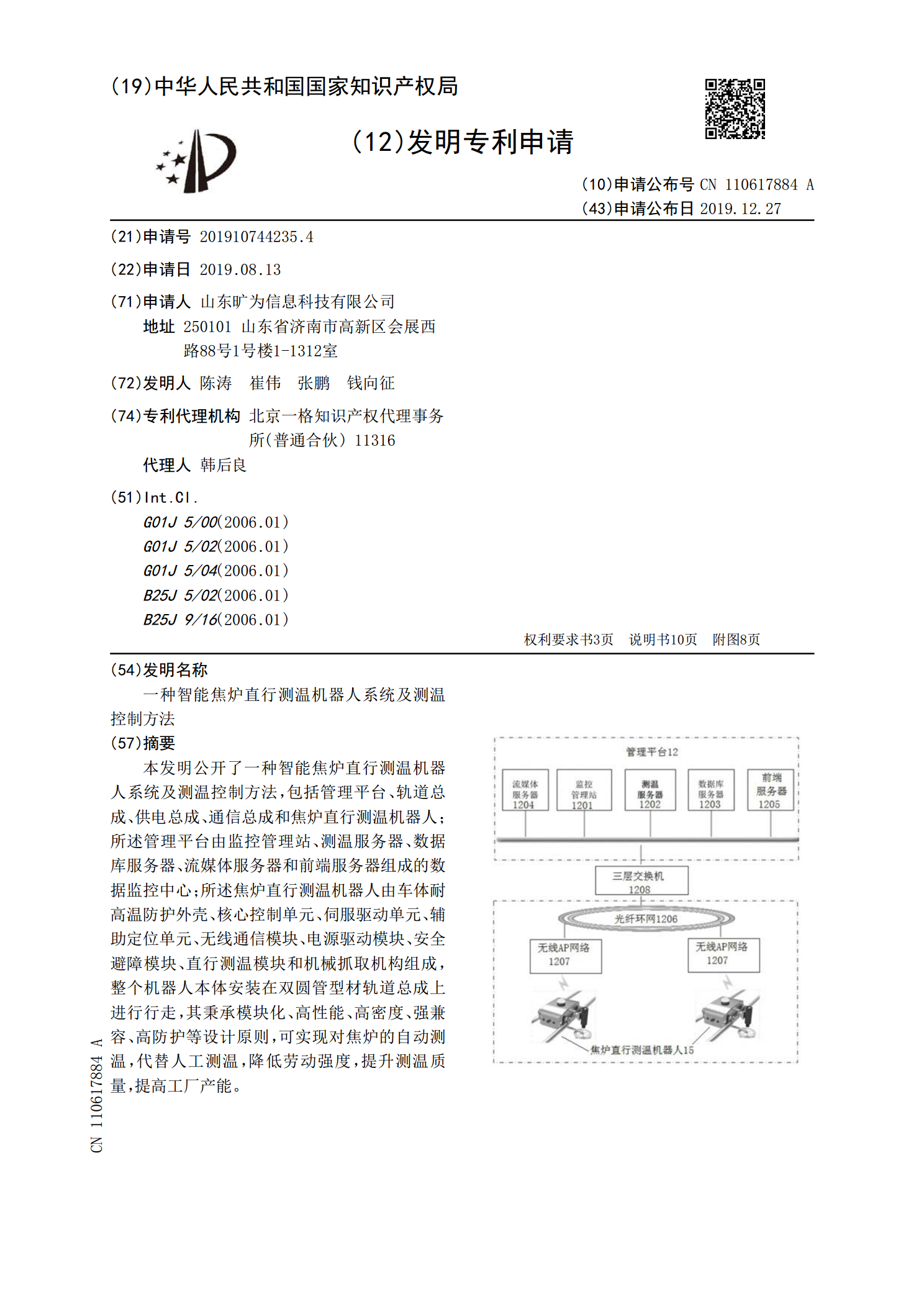
本发明公开了一种智能焦炉直行测温机器人系统及测温控制方法,包括管理平台、轨道总成、供电总成、通信总成和焦炉直行测温机器人;所述管理平台由监控管理站、测温服务器、数据库服务器、流媒体服务器和前端服务器组成的数据监控中心;所述焦炉直行测温机器人由车体耐高温防护外壳、核心控制单元、伺服驱动单元、辅助定位单元、无线通信模块、电源驱动模块、安全避障模块、直行测温模块和机械抓取机构组成,整个机器人本体安装在双圆管型材轨道总成上进行行走,其秉承模块化、高性能、高密度、强兼容、高防护等设计原则,可实现对焦炉的自动测温,代
一种焦炉炉顶看火孔自动测温装置.pdf
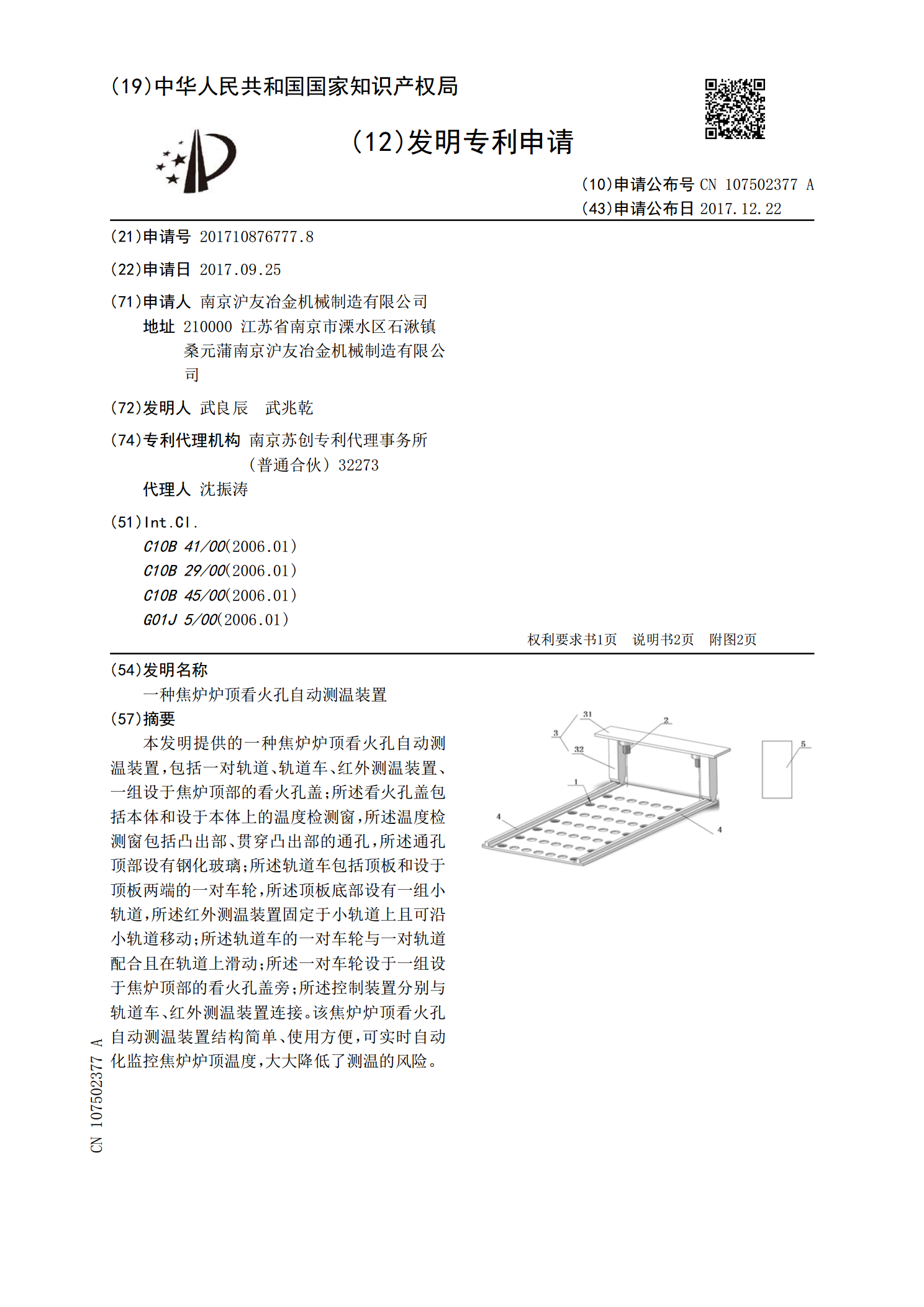
本发明提供的一种焦炉炉顶看火孔自动测温装置,包括一对轨道、轨道车、红外测温装置、一组设于焦炉顶部的看火孔盖;所述看火孔盖包括本体和设于本体上的温度检测窗,所述温度检测窗包括凸出部、贯穿凸出部的通孔,所述通孔顶部设有钢化玻璃;所述轨道车包括顶板和设于顶板两端的一对车轮,所述顶板底部设有一组小轨道,所述红外测温装置固定于小轨道上且可沿小轨道移动;所述轨道车的一对车轮与一对轨道配合且在轨道上滑动;所述一对车轮设于一组设于焦炉顶部的看火孔盖旁;所述控制装置分别与轨道车、红外测温装置连接。该焦炉炉顶看火孔自动测温装
一种焦炉炉顶测温孔封堵灌浆装置及封堵灌浆方法.pdf
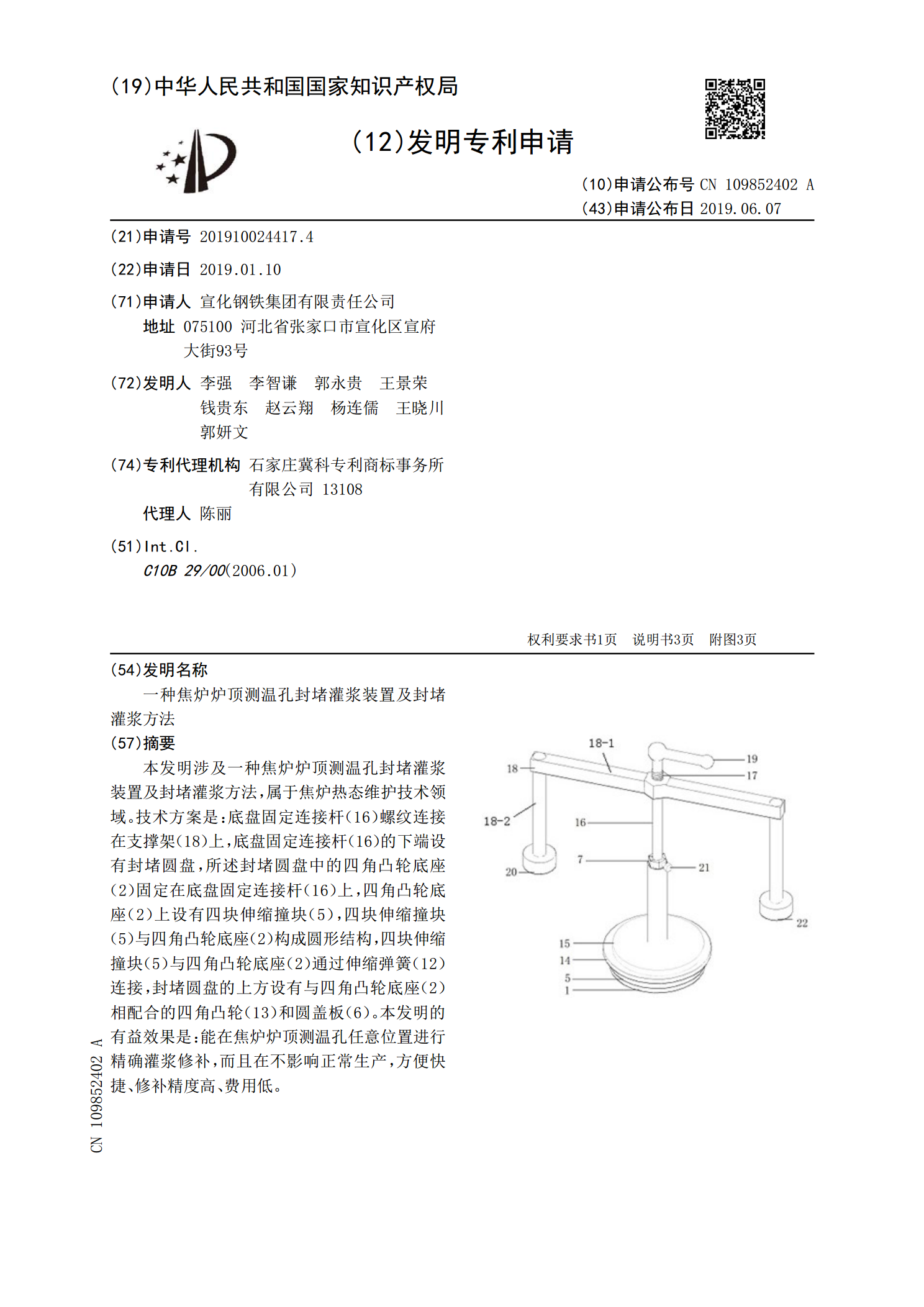
本发明涉及一种焦炉炉顶测温孔封堵灌浆装置及封堵灌浆方法,属于焦炉热态维护技术领域。技术方案是:底盘固定连接杆(16)螺纹连接在支撑架(18)上,底盘固定连接杆(16)的下端设有封堵圆盘,所述封堵圆盘中的四角凸轮底座(2)固定在底盘固定连接杆(16)上,四角凸轮底座(2)上设有四块伸缩撞块(5),四块伸缩撞块(5)与四角凸轮底座(2)构成圆形结构,四块伸缩撞块(5)与四角凸轮底座(2)通过伸缩弹簧(12)连接,封堵圆盘的上方设有与四角凸轮底座(2)相配合的四角凸轮(13)和圆盖板(6)。本发明的有益效果是:

一种轨道式焦炉测温机器人及其测温方法.pdf
本发明公开了一种轨道式焦炉测温机器人及其测温方法,包括安装于焦炉炉顶看火孔一侧的轨道和在轨道上移动的机器人本体,机器人本体包括:驱动机构,安装在机器人本体的车架部分上,用于驱动车架部分行走于轨道上;开盖机构,位于车架部分的底部,用于车架部分在行走的过程中打开所经过的看火孔的看火孔盖;测温机构,位于车架部分的顶部,用于在开盖机构打开看火孔时对设定目标区域的温度进行测量;控制模块,安装于车架部分内部并与驱动机构和测温机构连接,用于控制机器人的各类动作并将测温机构测的温度数据实时发送至远程控制计算机。本发明的焦