
一种单晶炉副室管道清扫机器人.pdf

是翠****ng


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种单晶炉副室管道清扫机器人.pdf
本发明公开了一种单晶炉副室管道清扫机器人,包括攀爬装置、安装于攀爬装置上的清洁装置、电源及控制装置、跟随照明及云台相机检测部件。该清扫机器人通过攀爬装置在管道内壁上攀爬。同时,在管道的攀爬过程中,通过清洁装置对管道内可以攀爬到的各个位置进行。该清扫机器人能够代替人力人工远程操作控制,避免使用人力在管道内部爬高的安全隐患,实现对管道内的无人自动化清扫。

一种单晶炉副室.pdf
本实用新型涉及一种清扫擦拭更加方便的单晶炉副室。采用的技术方案包括:单晶炉副室本体,所述单晶炉副室本体的侧壁至少设有一个清洗窗,所述清洗窗包括焊接于所述单晶炉副室本体侧壁上的底座以及通过铰链铰接于所述底座一端的上盖所述上盖内设有冷却液流道、一侧设有与所述冷却液流道连通的进水口和出水口。优点如下:1、通过在单晶炉副室本体侧壁设置一组清洗窗,通过清洗窗可对单晶炉副室本体进行分段清扫擦拭,可以不需要将单晶炉副室本体拆卸。
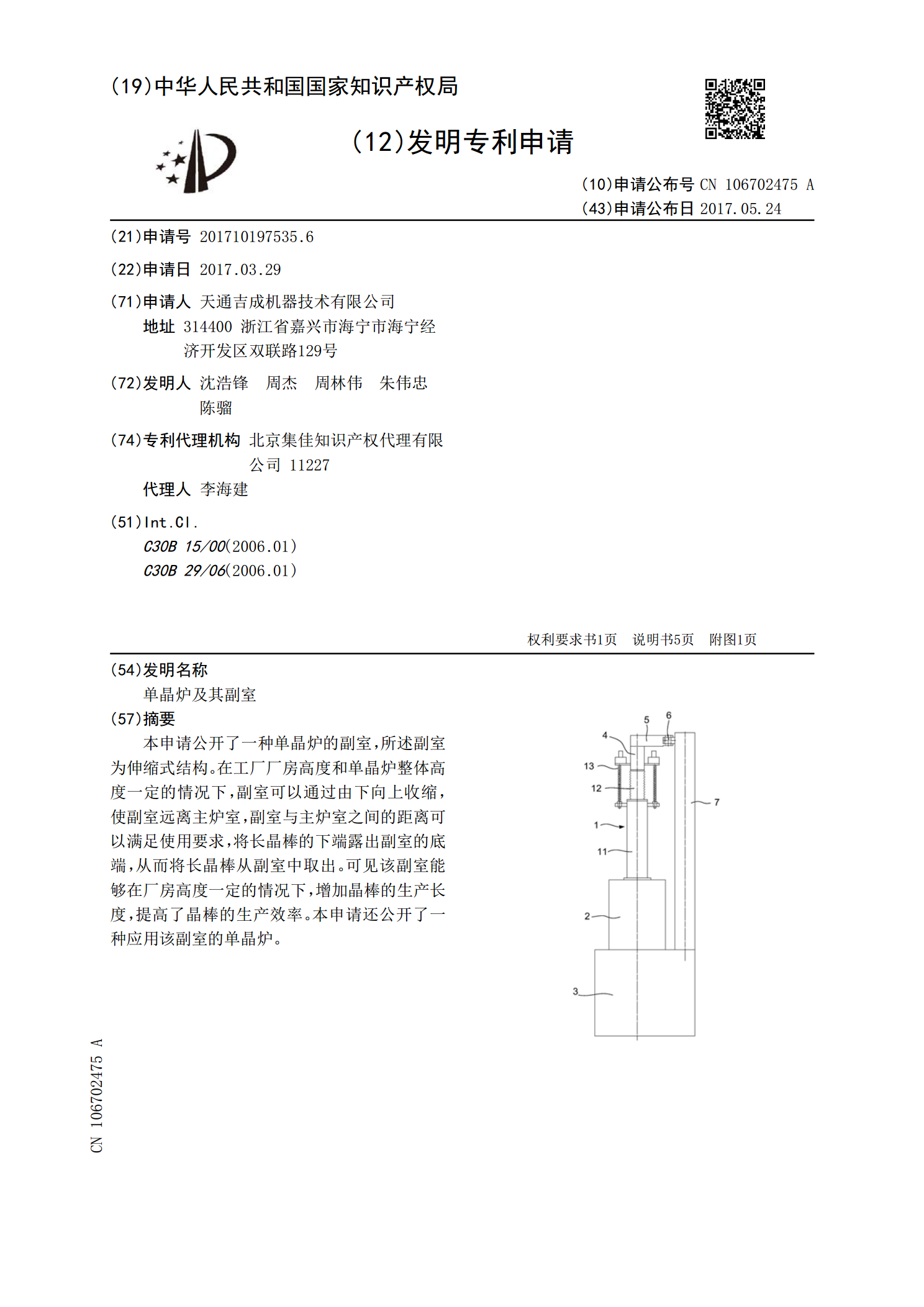
单晶炉及其副室.pdf
本申请公开了一种单晶炉的副室,所述副室为伸缩式结构。在工厂厂房高度和单晶炉整体高度一定的情况下,副室可以通过由下向上收缩,使副室远离主炉室,副室与主炉室之间的距离可以满足使用要求,将长晶棒的下端露出副室的底端,从而将长晶棒从副室中取出。可见该副室能够在厂房高度一定的情况下,增加晶棒的生产长度,提高了晶棒的生产效率。本申请还公开了一种应用该副室的单晶炉。
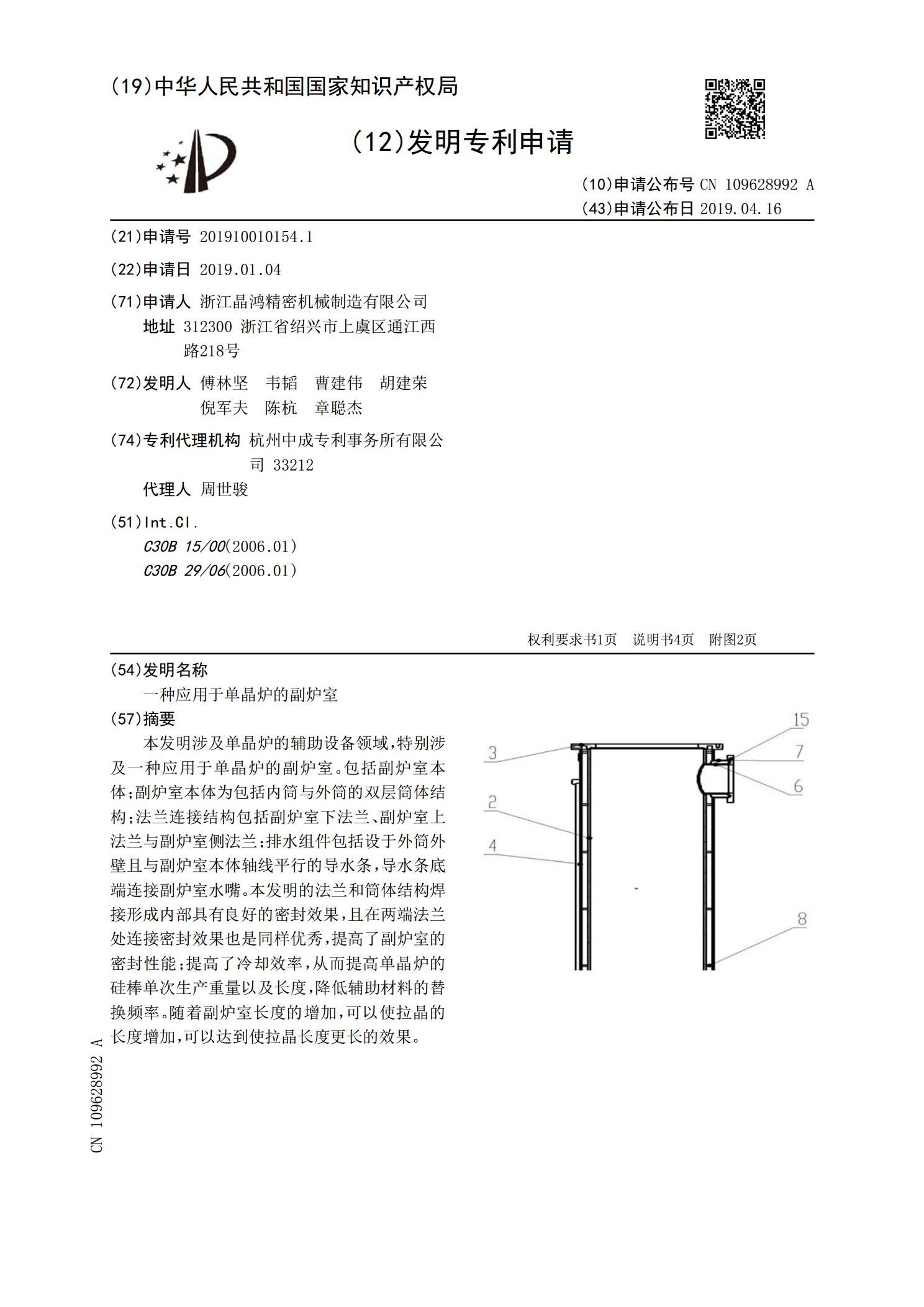
一种应用于单晶炉的副炉室.pdf
本发明涉及单晶炉的辅助设备领域,特别涉及一种应用于单晶炉的副炉室。包括副炉室本体;副炉室本体为包括内筒与外筒的双层筒体结构;法兰连接结构包括副炉室下法兰、副炉室上法兰与副炉室侧法兰;排水组件包括设于外筒外壁且与副炉室本体轴线平行的导水条,导水条底端连接副炉室水嘴。本发明的法兰和筒体结构焊接形成内部具有良好的密封效果,且在两端法兰处连接密封效果也是同样优秀,提高了副炉室的密封性能;提高了冷却效率,从而提高单晶炉的硅棒单次生产重量以及长度,降低辅助材料的替换频率。随着副炉室长度的增加,可以使拉晶的长度增加,可

一种单晶炉用副炉室升降与旋转装置.pdf
本申请涉及一种涉及单晶炉的领域,尤其是一种单晶炉用副炉室升降与旋转装置,设置在主炉室的一侧并与副炉室相连接,包括支撑架、升降机构、旋转机构和连接副炉室的连接机构,所述的支撑架与主炉室机架相连,支撑架上设置有主轴,所述的升降机构设置在支撑架上并与主轴活动连接,所述的旋转机构设置在支撑架的顶部并与主轴相连接,所述的连接机构的一端与升降机构相连接,其另一端与旋转机构相连接,连接机构设置在主轴的侧面并与主轴固定连接。本申请具有提高了单晶炉运行的稳定性,保证了单晶炉在生产过程中能够长期安全、可靠运行的效果。