
一种锅炉水冷壁的缺陷检测系统、方法、设备及介质.pdf

是秋****写意

1/10
2/10
3/10
4/10
5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种锅炉水冷壁的缺陷检测系统、方法、设备及介质.pdf
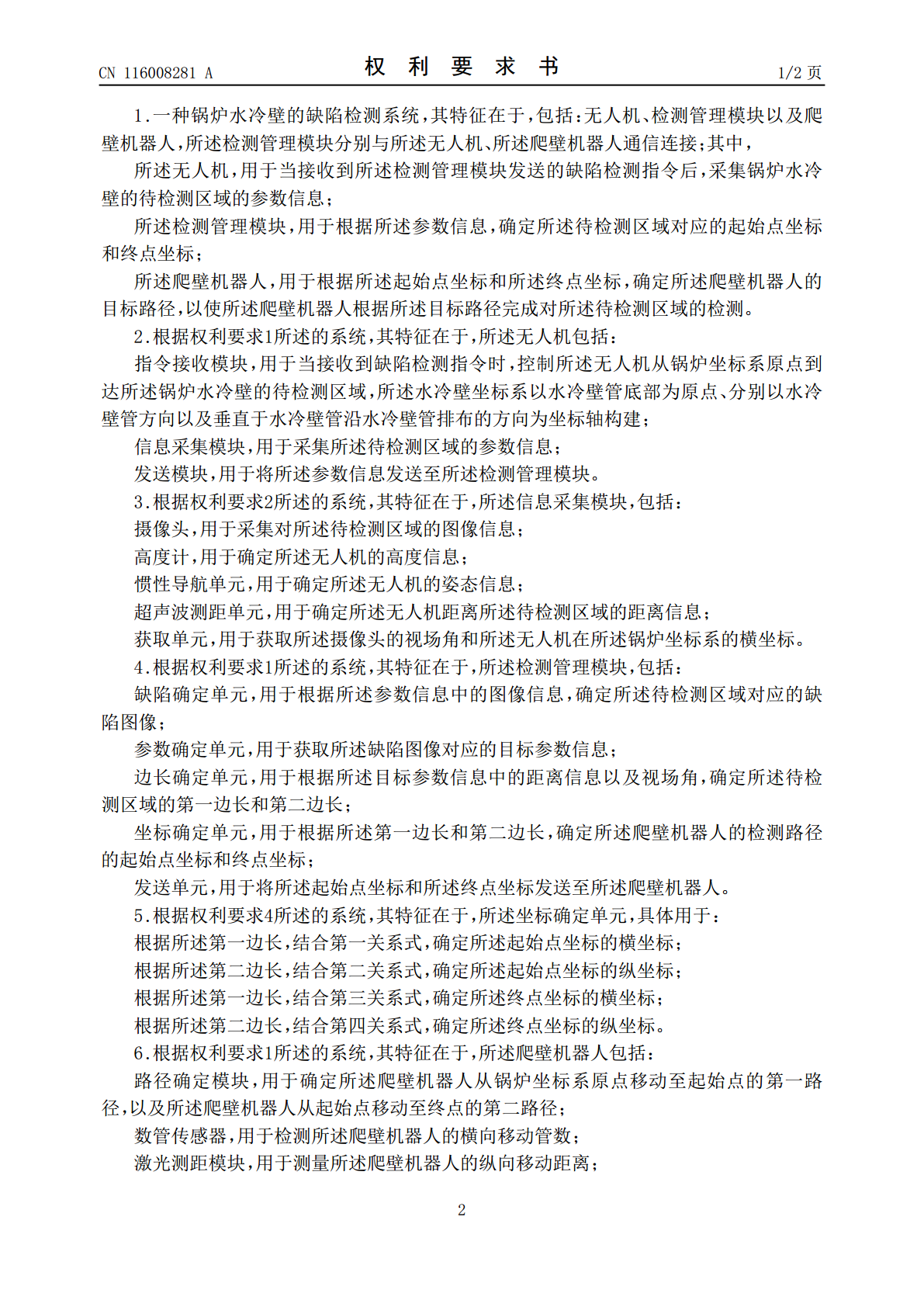
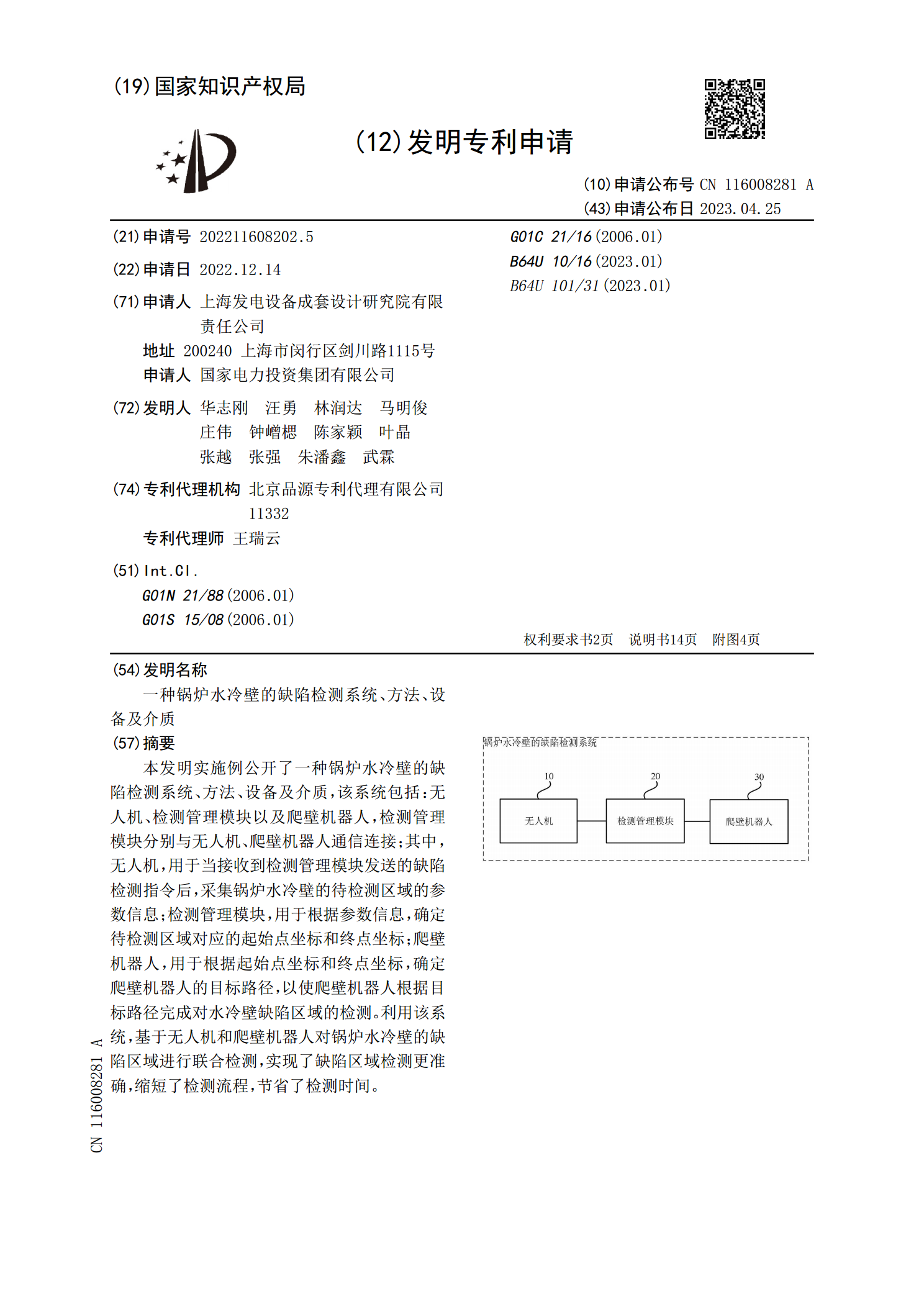
本发明实施例公开了一种锅炉水冷壁的缺陷检测系统、方法、设备及介质,该系统包括:无人机、检测管理模块以及爬壁机器人,检测管理模块分别与无人机、爬壁机器人通信连接;其中,无人机,用于当接收到检测管理模块发送的缺陷检测指令后,采集锅炉水冷壁的待检测区域的参数信息;检测管理模块,用于根据参数信息,确定待检测区域对应的起始点坐标和终点坐标;爬壁机器人,用于根据起始点坐标和终点坐标,确定爬壁机器人的目标路径,以使爬壁机器人根据目标路径完成对水冷壁缺陷区域的检测。利用该系统,基于无人机和爬壁机器人对锅炉水冷壁的缺陷区域
一种锅炉水冷壁管缺陷识别系统、方法和存储介质.pdf
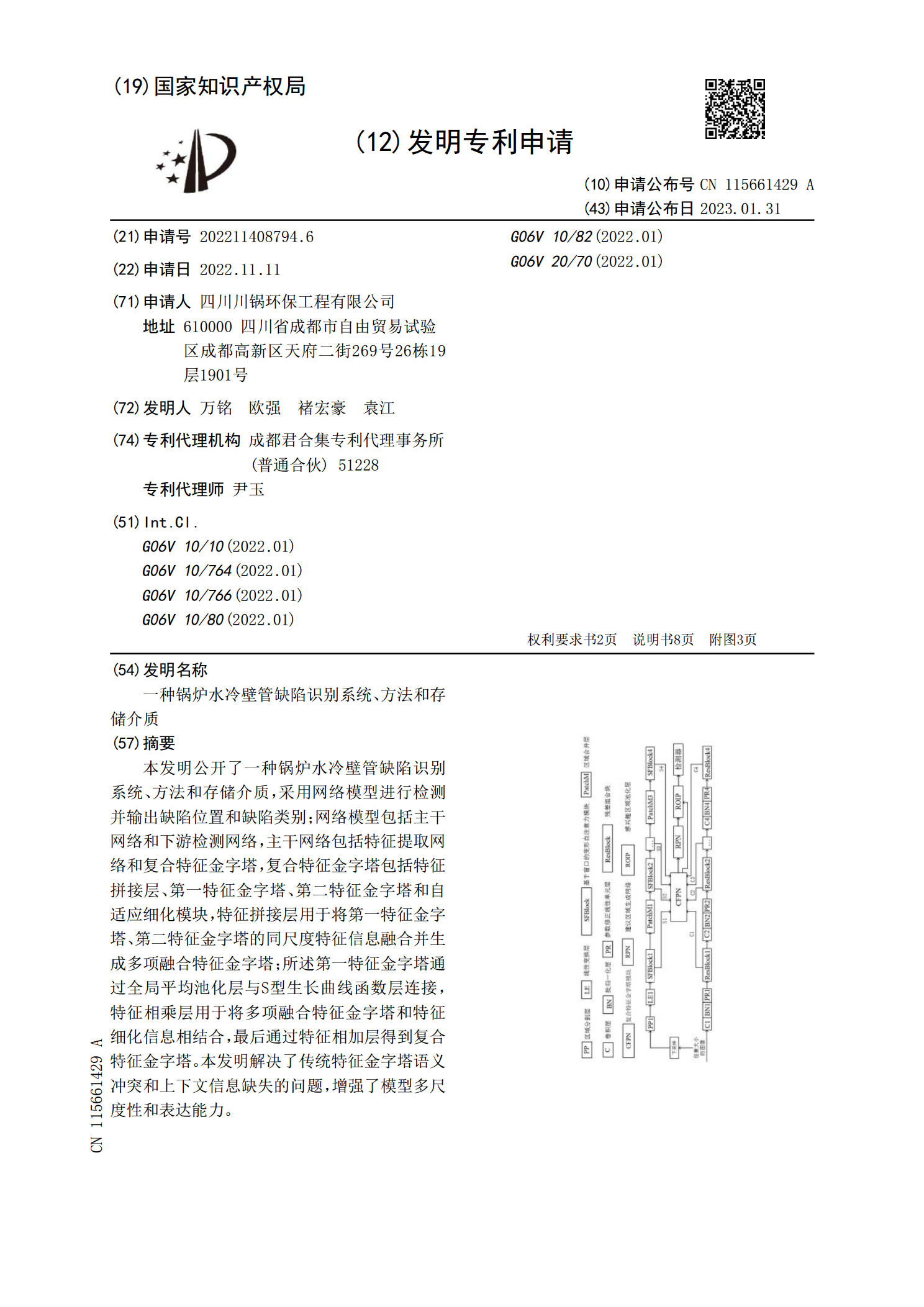
本发明公开了一种锅炉水冷壁管缺陷识别系统、方法和存储介质,采用网络模型进行检测并输出缺陷位置和缺陷类别;网络模型包括主干网络和下游检测网络,主干网络包括特征提取网络和复合特征金字塔,复合特征金字塔包括特征拼接层、第一特征金字塔、第二特征金字塔和自适应细化模块,特征拼接层用于将第一特征金字塔、第二特征金字塔的同尺度特征信息融合并生成多项融合特征金字塔;所述第一特征金字塔通过全局平均池化层与S型生长曲线函数层连接,特征相乘层用于将多项融合特征金字塔和特征细化信息相结合,最后通过特征相加层得到复合特征金字塔。本

锅炉炉膛水冷壁寿命预测方法、装置、系统、设备及介质.pdf
本申请公开了一种锅炉炉膛水冷壁寿命预测方法、装置、系统、电子设备及可读存储介质,应用于电力技术领域。其中,方法包括根据锅炉全炉膛水冷壁全区域的温度信息,确定用于预测水冷壁剩余寿命的取样区域;根据所选择的失效模式,获取目标区域中的各目标水冷壁管与该失效模式相匹配的测量数据;基于该测量数据,调用水冷壁寿命预测模型计算水冷壁的剩余寿命。水冷壁寿命预测模型基于水冷壁管的老化测量数据和损伤测量数据所构建,用于预测不同失效模式下水冷壁的剩余寿命。本申请可精准预测锅炉炉膛水冷壁管的寿命,有效保障发电机组安全稳定地运行。
一种锅炉水冷壁管缺陷涡流检测装置.pdf
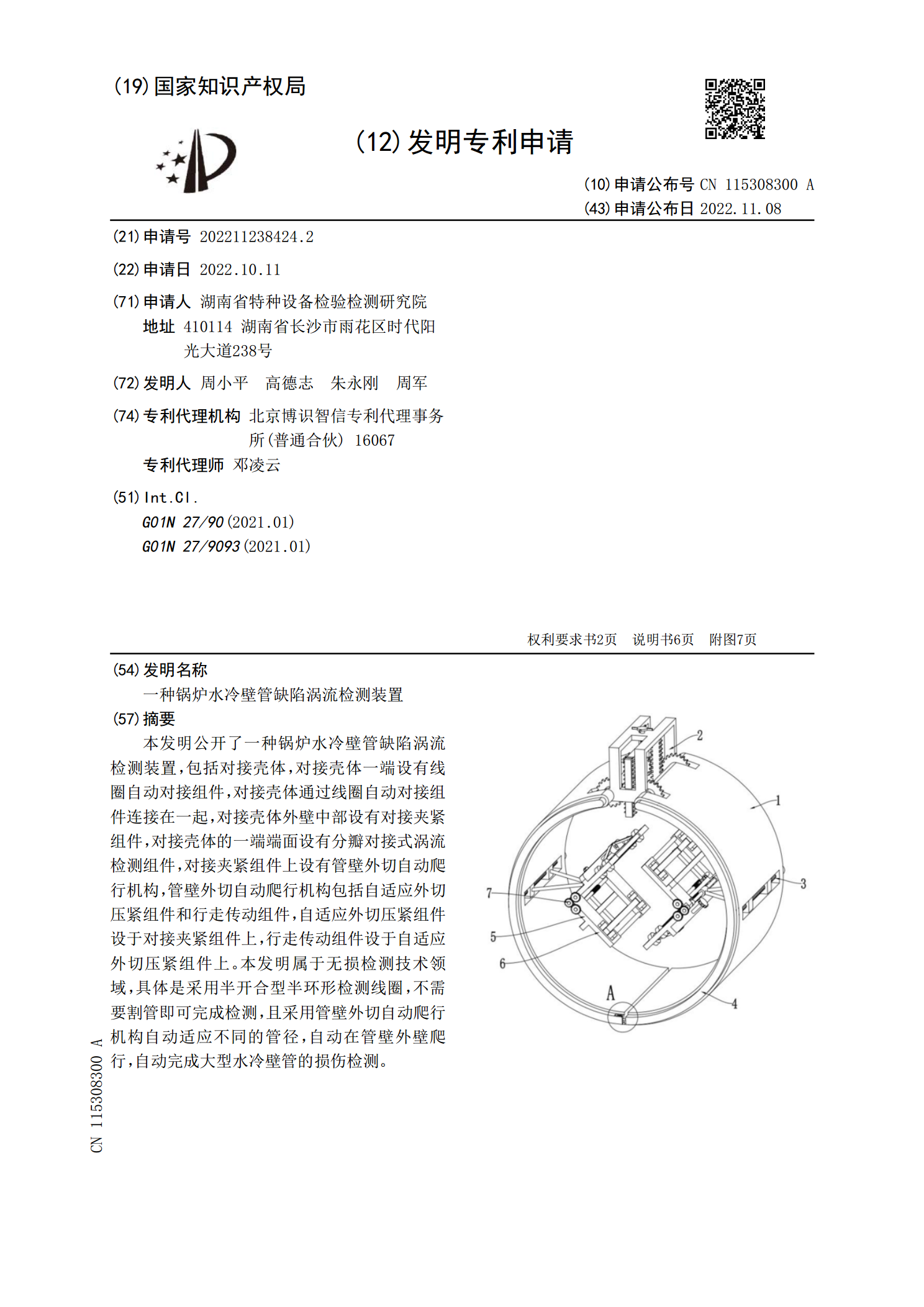
本发明公开了一种锅炉水冷壁管缺陷涡流检测装置,包括对接壳体,对接壳体一端设有线圈自动对接组件,对接壳体通过线圈自动对接组件连接在一起,对接壳体外壁中部设有对接夹紧组件,对接壳体的一端端面设有分瓣对接式涡流检测组件,对接夹紧组件上设有管壁外切自动爬行机构,管壁外切自动爬行机构包括自适应外切压紧组件和行走传动组件,自适应外切压紧组件设于对接夹紧组件上,行走传动组件设于自适应外切压紧组件上。本发明属于无损检测技术领域,具体是采用半开合型半环形检测线圈,不需要割管即可完成检测,且采用管壁外切自动爬行机构自动适应不

一种锅炉水冷壁故障检测方法.pdf
本发明公开了一种锅炉水冷壁故障检测方法,包括以下步骤:(1)遥控无人飞行机进入锅炉炉膛;(2)无人飞行机进行录像;(3)录像转化为图像;(4)与数据库图像比对、分析;(5)重点拍摄、传送及提醒;(6)人工核查。本发明与现有技术相比的优点是:本发明的方法免去人工进入炉膛检测的高危险、保证了工作人员的安全,检测人员只需要在控制室就能把握掌控整个炉膛内的情况。同时,由于检测时不用冷却通风、搭建平台、安装照明、增加补氧等措施,大大的减少了锅炉停运的时间,提高了锅炉的运行时间,增加了经济效益。