
车用影像处理方法及其系统.pdf

一吃****海逸


1/10
2/10
3/10
4/10
5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共32页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车用影像处理方法及其系统.pdf
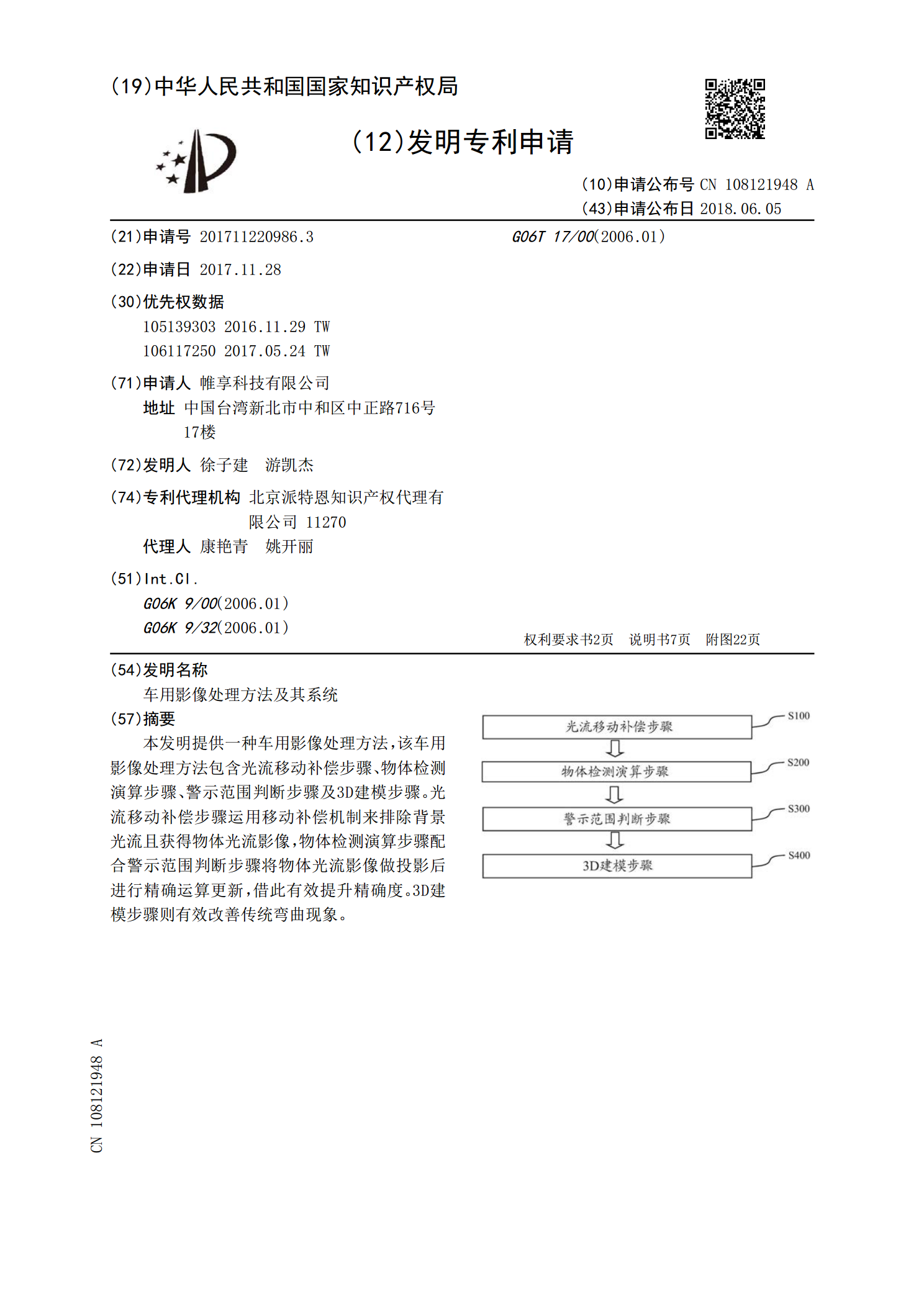
本发明提供一种车用影像处理方法,该车用影像处理方法包含光流移动补偿步骤、物体检测演算步骤、警示范围判断步骤及3D建模步骤。光流移动补偿步骤运用移动补偿机制来排除背景光流且获得物体光流影像,物体检测演算步骤配合警示范围判断步骤将物体光流影像做投影后进行精确运算更新,借此有效提升精确度。3D建模步骤则有效改善传统弯曲现象。

影像处理装置及其影像处理方法.pdf
本发明公开了一种影像处理装置及其影像处理方法。影像处理装置包含一记忆模组、一物件检测模组及一处理模组。记忆模组用于储存经由一摄像模组所撷取的数个影像,影像包含至少一物件。物件检测模组从该些影像中取出其中之一作为一基准影像,且将其余该些影像与基准影像进行比对,以寻找出具有轮廓及色彩对应物件的所在区域。若物件检测模组比对出轮廓及色彩对应的物件于基准影像与其余该些影像中位于不同区域时,处理模组就将基准影像中对应的物件移除,或是将对应的各物件同时迭加于基准影像中。
影像处理系统及影像处理方法.pdf
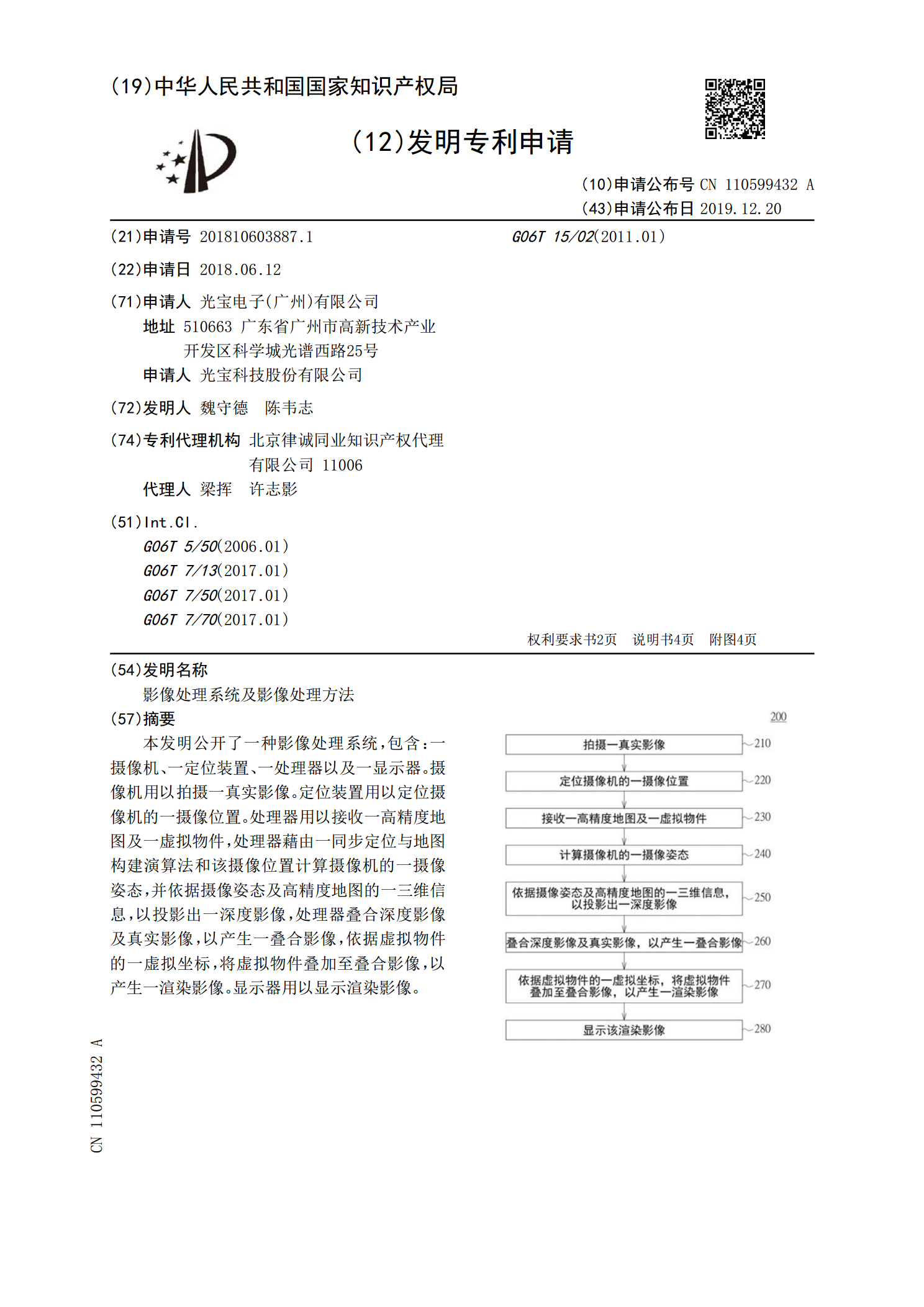
本发明公开了一种影像处理系统,包含:一摄像机、一定位装置、一处理器以及一显示器。摄像机用以拍摄一真实影像。定位装置用以定位摄像机的一摄像位置。处理器用以接收一高精度地图及一虚拟物件,处理器藉由一同步定位与地图构建演算法和该摄像位置计算摄像机的一摄像姿态,并依据摄像姿态及高精度地图的一三维信息,以投影出一深度影像,处理器叠合深度影像及真实影像,以产生一叠合影像,依据虚拟物件的一虚拟坐标,将虚拟物件叠加至叠合影像,以产生一渲染影像。显示器用以显示渲染影像。

车用空调系统及其控制方法.pdf
本发明公开了一种车用空调系统,其在压缩机的转轴上加装离合器,通过环境传感器获取的环境信号控制离合器与压缩机上带轮的吸合,以此来控制发动机是否向压缩机输出动力,从而带动压缩机进行制冷。本发明所提供的一种车用空调系统及其控制方法,能够提高压缩机在小排量工况时的工作效率,防止空调系统处于过冷状态,避免通过混风消耗过多的能量,从而降低了空调能耗,减少了燃油消耗。

影像处理装置及其方法.pdf
一种影像处理方法包含接收当前输入影像框与先前输出影像框、比对该当前输入影像框与先前输出影像框坐标相对应的多个第一像素与多个第二像素,并获得对应的多个差异值;依据该些差异值及一动态参数表,获得多个动态参数值、依据该些动态参数值及一边界运算子,获得多个边界保留值、以及依据该些第一像素、该些第二像素、及该些边界保留值,获得多个当前输出像素。影像处理装置执行上述影像处理方法,藉此提升辨识邻接移动区域与非移动区域的边界的准确度与去除该边界的残影。