
曲面自动成像对焦方法及系统.pdf

一条****彩妍

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
曲面自动成像对焦方法及系统.pdf
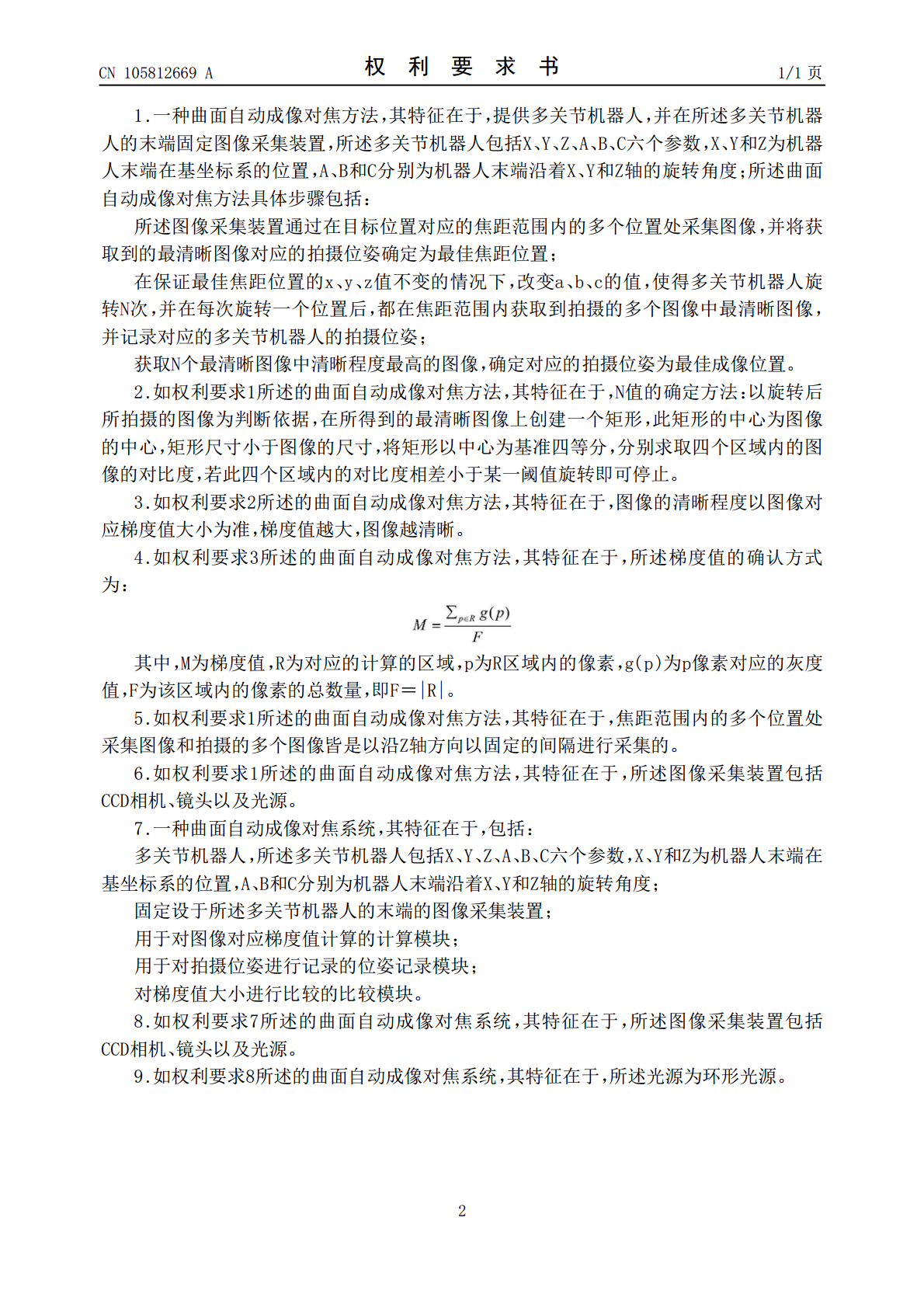
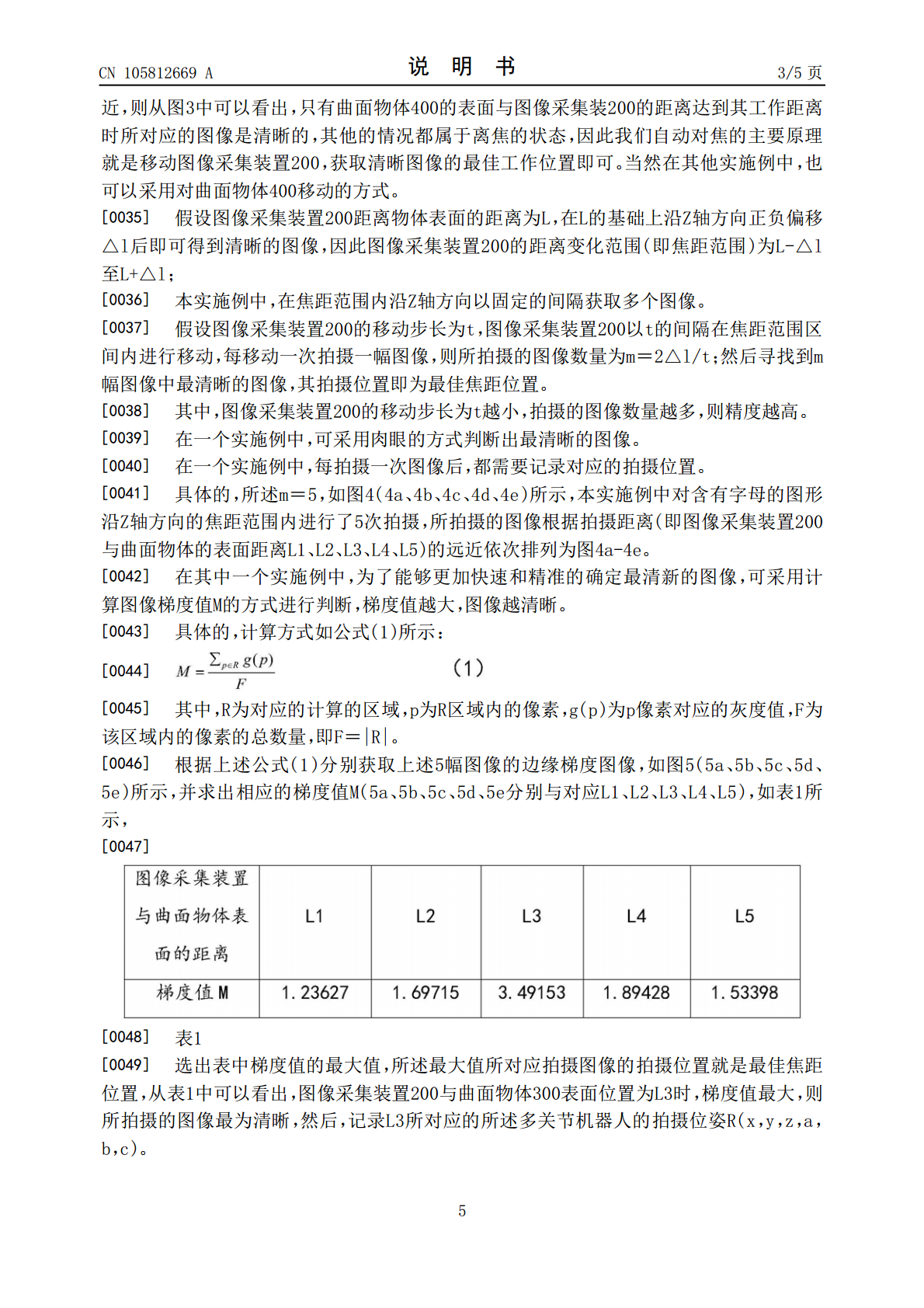
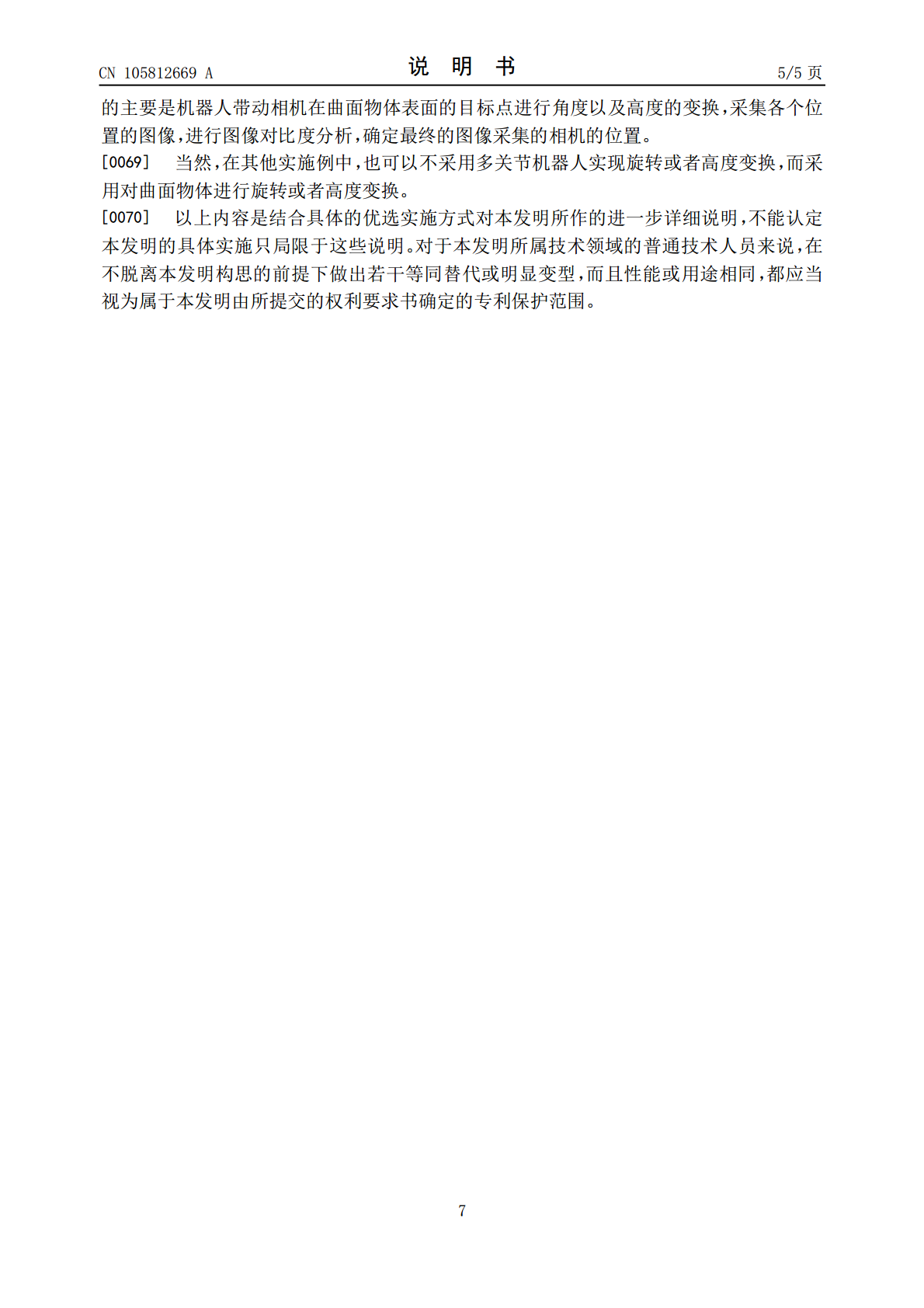
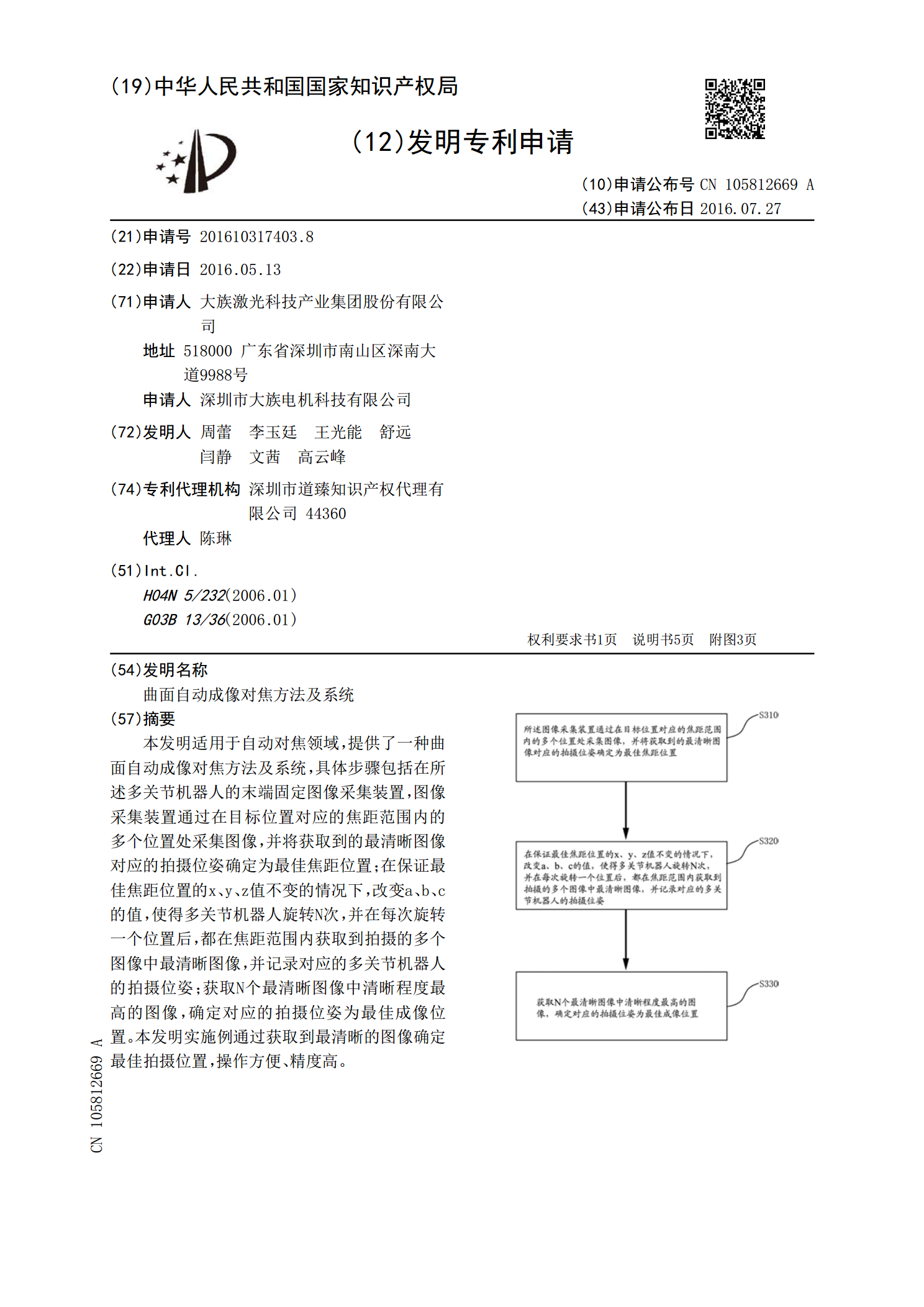
本发明适用于自动对焦领域,提供了一种曲面自动成像对焦方法及系统,具体步骤包括在所述多关节机器人的末端固定图像采集装置,图像采集装置通过在目标位置对应的焦距范围内的多个位置处采集图像,并将获取到的最清晰图像对应的拍摄位姿确定为最佳焦距位置;在保证最佳焦距位置的x、y、z值不变的情况下,改变a、b、c的值,使得多关节机器人旋转N次,并在每次旋转一个位置后,都在焦距范围内获取到拍摄的多个图像中最清晰图像,并记录对应的多关节机器人的拍摄位姿;获取N个最清晰图像中清晰程度最高的图像,确定对应的拍摄位姿为最佳成像位置
自动对焦方法、设备及成像装置.pdf
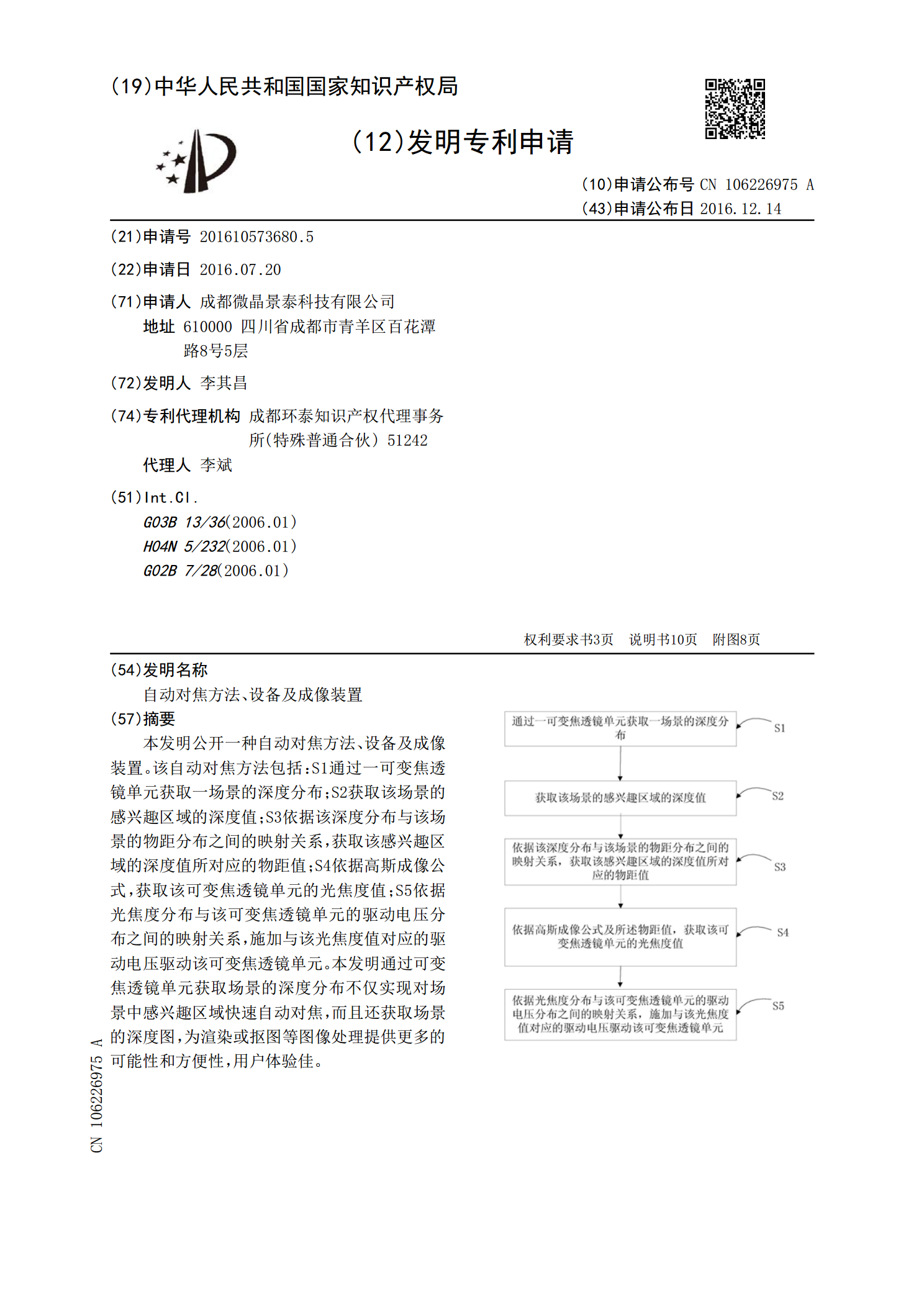
本发明公开一种自动对焦方法、设备及成像装置。该自动对焦方法包括:S1通过一可变焦透镜单元获取一场景的深度分布;S2获取该场景的感兴趣区域的深度值;S3依据该深度分布与该场景的物距分布之间的映射关系,获取该感兴趣区域的深度值所对应的物距值;S4依据高斯成像公式,获取该可变焦透镜单元的光焦度值;S5依据光焦度分布与该可变焦透镜单元的驱动电压分布之间的映射关系,施加与该光焦度值对应的驱动电压驱动该可变焦透镜单元。本发明通过可变焦透镜单元获取场景的深度分布不仅实现对场景中感兴趣区域快速自动对焦,而且还获取场景的深
曲面显微成像系统及其成像方法.pdf
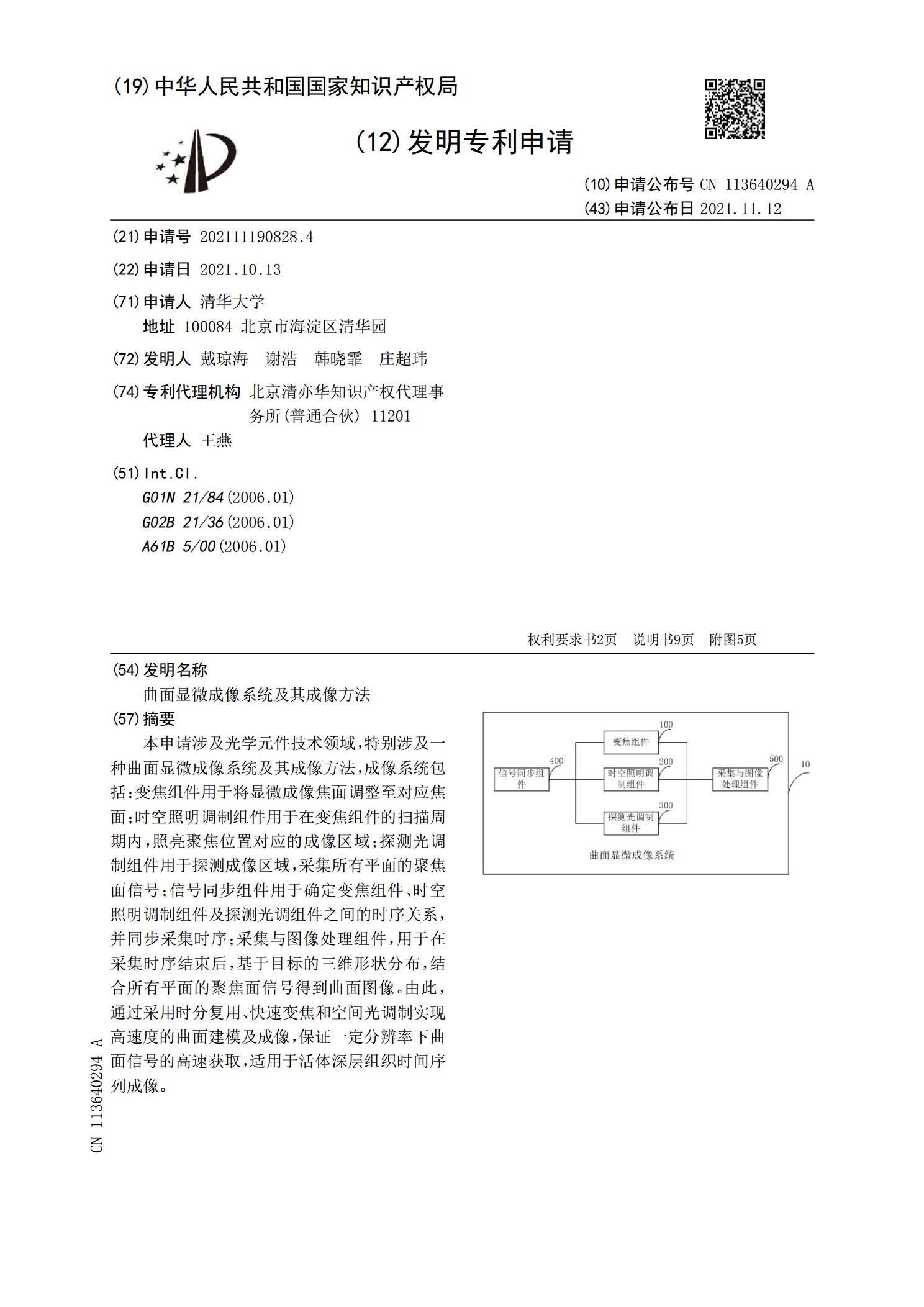
本申请涉及光学元件技术领域,特别涉及一种曲面显微成像系统及其成像方法,成像系统包括:变焦组件用于将显微成像焦面调整至对应焦面;时空照明调制组件用于在变焦组件的扫描周期内,照亮聚焦位置对应的成像区域;探测光调制组件用于探测成像区域,采集所有平面的聚焦面信号;信号同步组件用于确定变焦组件、时空照明调制组件及探测光调组件之间的时序关系,并同步采集时序;采集与图像处理组件,用于在采集时序结束后,基于目标的三维形状分布,结合所有平面的聚焦面信号得到曲面图像。由此,通过采用时分复用、快速变焦和空间光调制实现高速度的曲
一种成像设备高效自动对焦方法.pdf
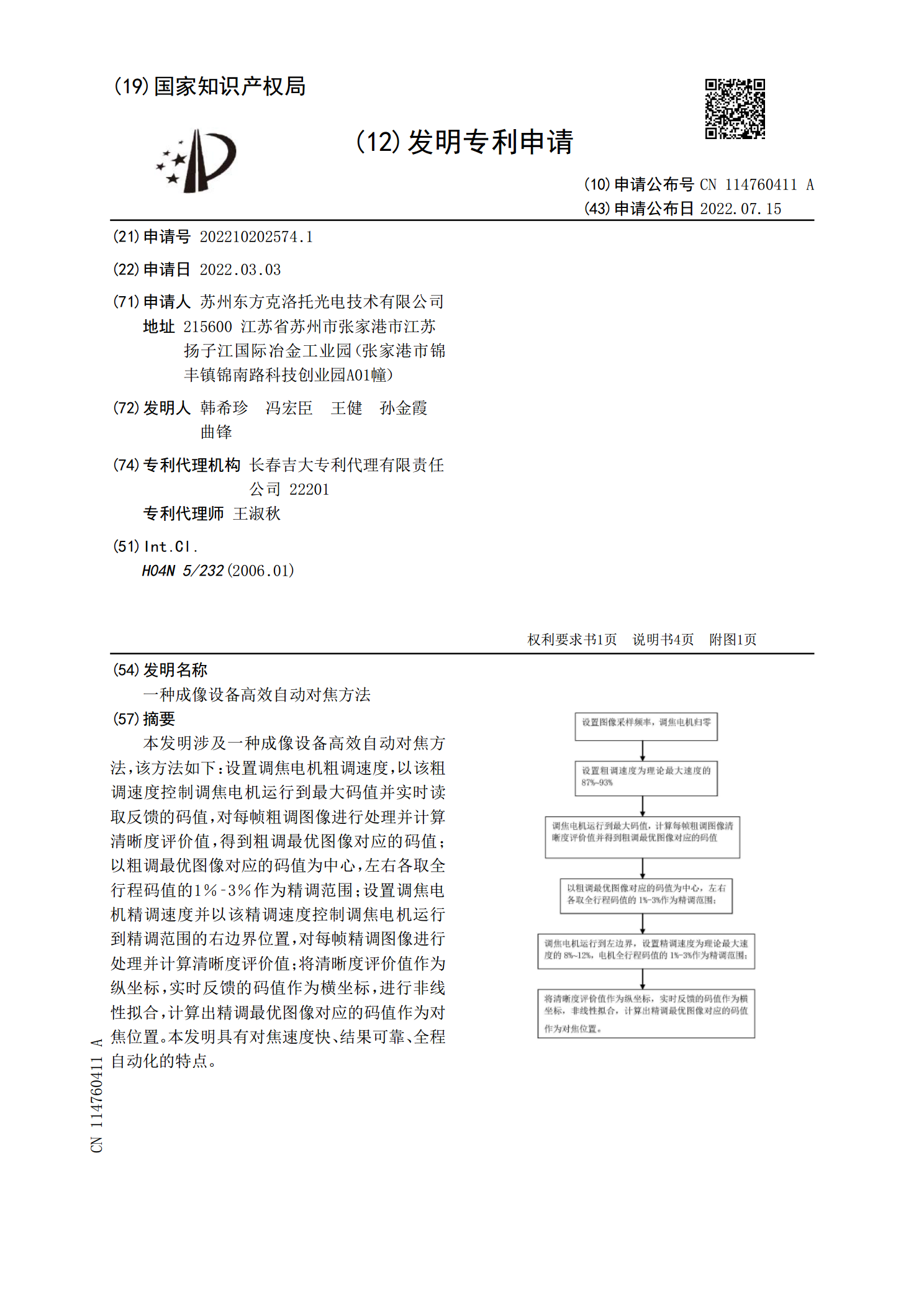
本发明涉及一种成像设备高效自动对焦方法,该方法如下:设置调焦电机粗调速度,以该粗调速度控制调焦电机运行到最大码值并实时读取反馈的码值,对每帧粗调图像进行处理并计算清晰度评价值,得到粗调最优图像对应的码值;以粗调最优图像对应的码值为中心,左右各取全行程码值的1%?3%作为精调范围;设置调焦电机精调速度并以该精调速度控制调焦电机运行到精调范围的右边界位置,对每帧精调图像进行处理并计算清晰度评价值;将清晰度评价值作为纵坐标,实时反馈的码值作为横坐标,进行非线性拟合,计算出精调最优图像对应的码值作为对焦位置。本发
数字成像中的自动对焦技术.pdf
数字成像中的自动对焦技术冯华君李奇徐之海浙江大学现代光学仪器国家重点实验室,浙江,杭州,310027摘要:本文详细介绍了作者在自动对焦领域的工作,对数字成像系统自动对焦的原理和研究现状进行了简单的介绍,重点讨论了图像清晰度评价标准,分析了对焦窗口选择的必要性,指出了传统方法只对特定成像目标才能取得较好的效果,然后对不同成像目标的对焦窗口选择策略进行了讨论;对成像主体在图像中心区域的情况作了分析,提出了探测图像中的皮肤区域来选择对焦窗口的方法、提出了跟踪拍摄者瞳孔来选择对焦窗口的方法。最后用DSP控制实现了