
一种基于融合事件和RGB数据的水下暗光场景重建方法.pdf

贤惠****66

1/10

2/10
3/10

4/10

5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于融合事件和RGB数据的水下暗光场景重建方法.pdf
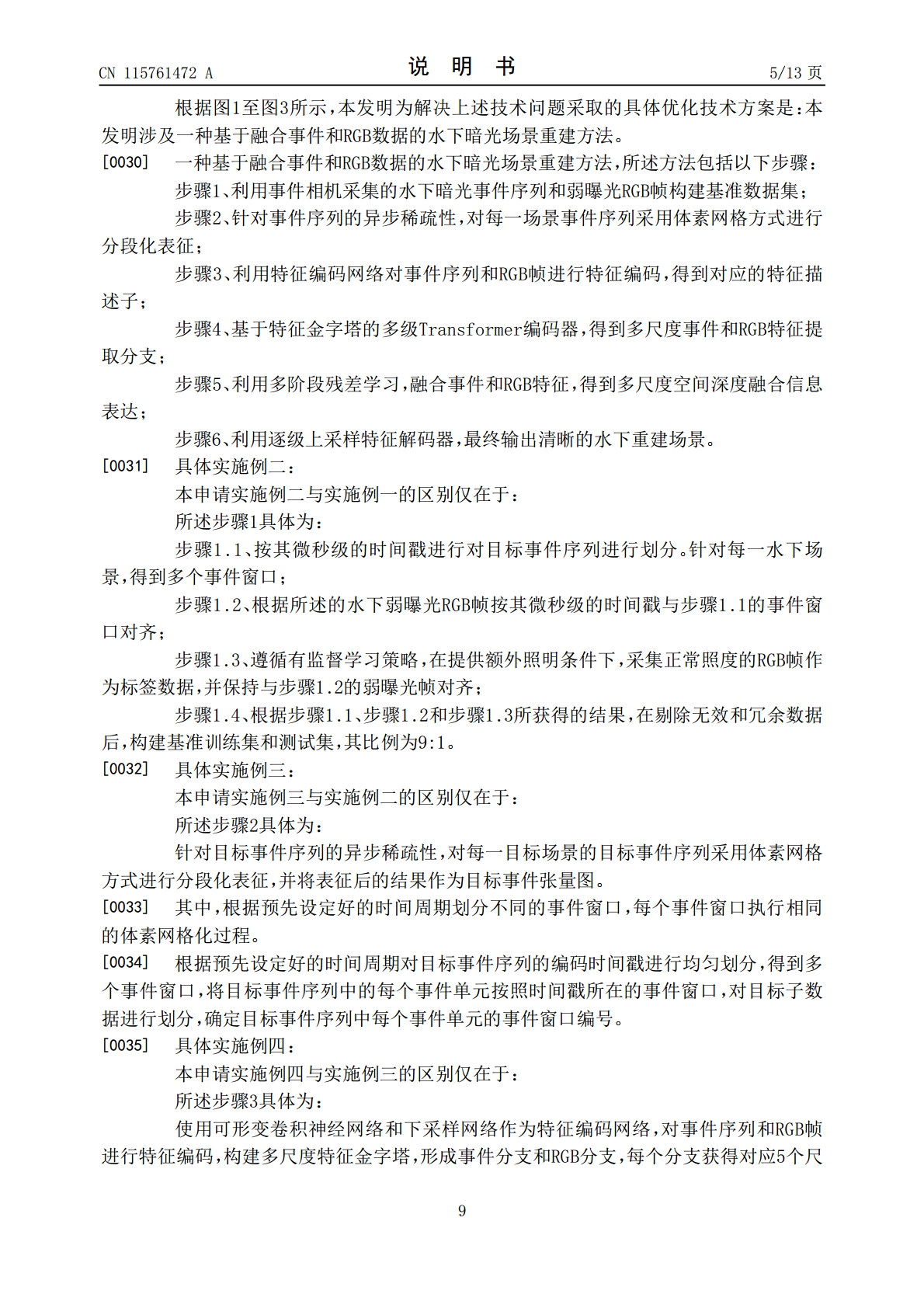
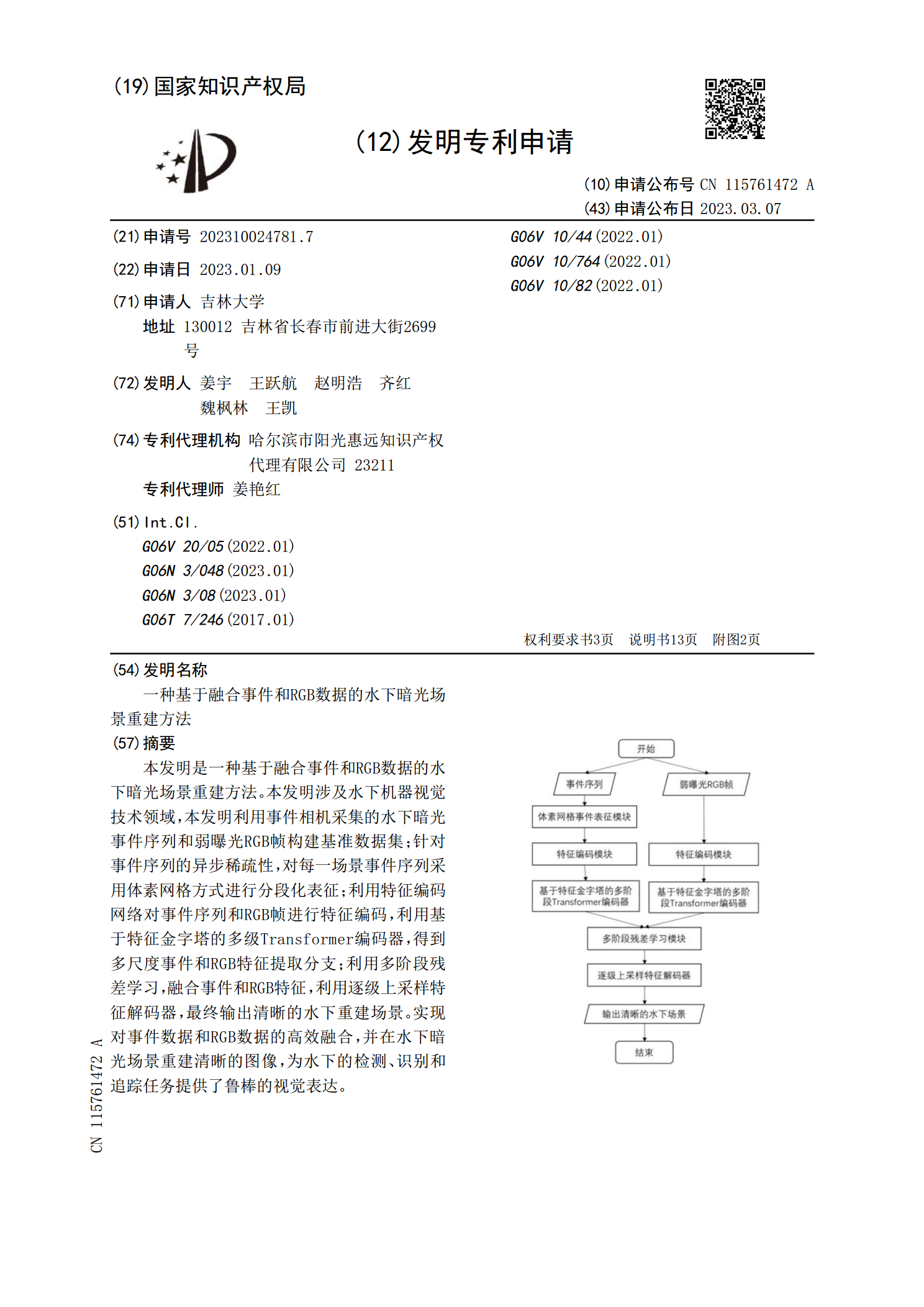
本发明是一种基于融合事件和RGB数据的水下暗光场景重建方法。本发明涉及水下机器视觉技术领域,本发明利用事件相机采集的水下暗光事件序列和弱曝光RGB帧构建基准数据集;针对事件序列的异步稀疏性,对每一场景事件序列采用体素网格方式进行分段化表征;利用特征编码网络对事件序列和RGB帧进行特征编码,利用基于特征金字塔的多级Transformer编码器,得到多尺度事件和RGB特征提取分支;利用多阶段残差学习,融合事件和RGB特征,利用逐级上采样特征解码器,最终输出清晰的水下重建场景。实现对事件数据和RGB数据的高效融

基于RGB信道融合的水下电缆检测方法研究.docx
基于RGB信道融合的水下电缆检测方法研究摘要:水下电缆的检测在海洋工程和海洋科学领域具有重要意义。本论文研究了基于RGB信道融合的水下电缆检测方法,通过对水下电缆图像的处理和分析,提出了一种有效的检测方法。首先,对水下电缆图像进行预处理,包括图像增强、噪声去除等步骤。然后,通过RGB信道的融合,将不同信道的信息融合起来,得到增强的电缆图像。最后,利用图像分割算法对电缆进行检测和提取。实验证明,该方法能够有效地检测水下电缆,具有较好的实用价值和应用前景。关键词:水下电缆;RGB信道融合;图像处理;图像分割1

一种基于FAST和FREAK特征匹配算法的RGB‑D和SLAM场景重建方法.pdf
本发明属于计算机图形学领域,具体地说是一种基于FAST和FREAK特征匹配算法的RGB‑D和SLAM场景重建方法。本发明包括,首先对Kinect进行标定;对彩色图像进行FAST特征点提取,采用FREAK特征描述子进行图像匹配,然后再对特征点对采用RANSAC算法剔除掉外点,保留内点。本发明采用对关键帧进行筛选,仅对关键帧进行点云的拼接,这样极大地减少了点云的拼接次数。本发明还采用了基于图优化的回环检测算法,通过构建姿态图,对其进行全局优化,极大降低了误差的累积。

基于特征学习和融合的RGB--D场景理解.docx
基于特征学习和融合的RGB--D场景理解摘要:RGB-D场景理解是计算机视觉领域中的一个重要任务,其旨在从RGB和深度数据中推断出场景中的物体和其属性信息。本论文提出了一种基于特征学习和融合的方法,以提高RGB-D场景理解的精度和鲁棒性。首先,我们使用深度神经网络从RGB和深度数据中提取语义特征。然后,我们利用多个不同网络的输出特征进行特征融合,从而得到更具有表现力和稳定性的特征表示。最后,我们使用支持向量机(SVM)分类器来对场景中的物体进行分类。实验结果表明,我们的方法在传统方法和其他先进方法上取得了
一种基于场景化多源数据融合分析的方法和系统.pdf
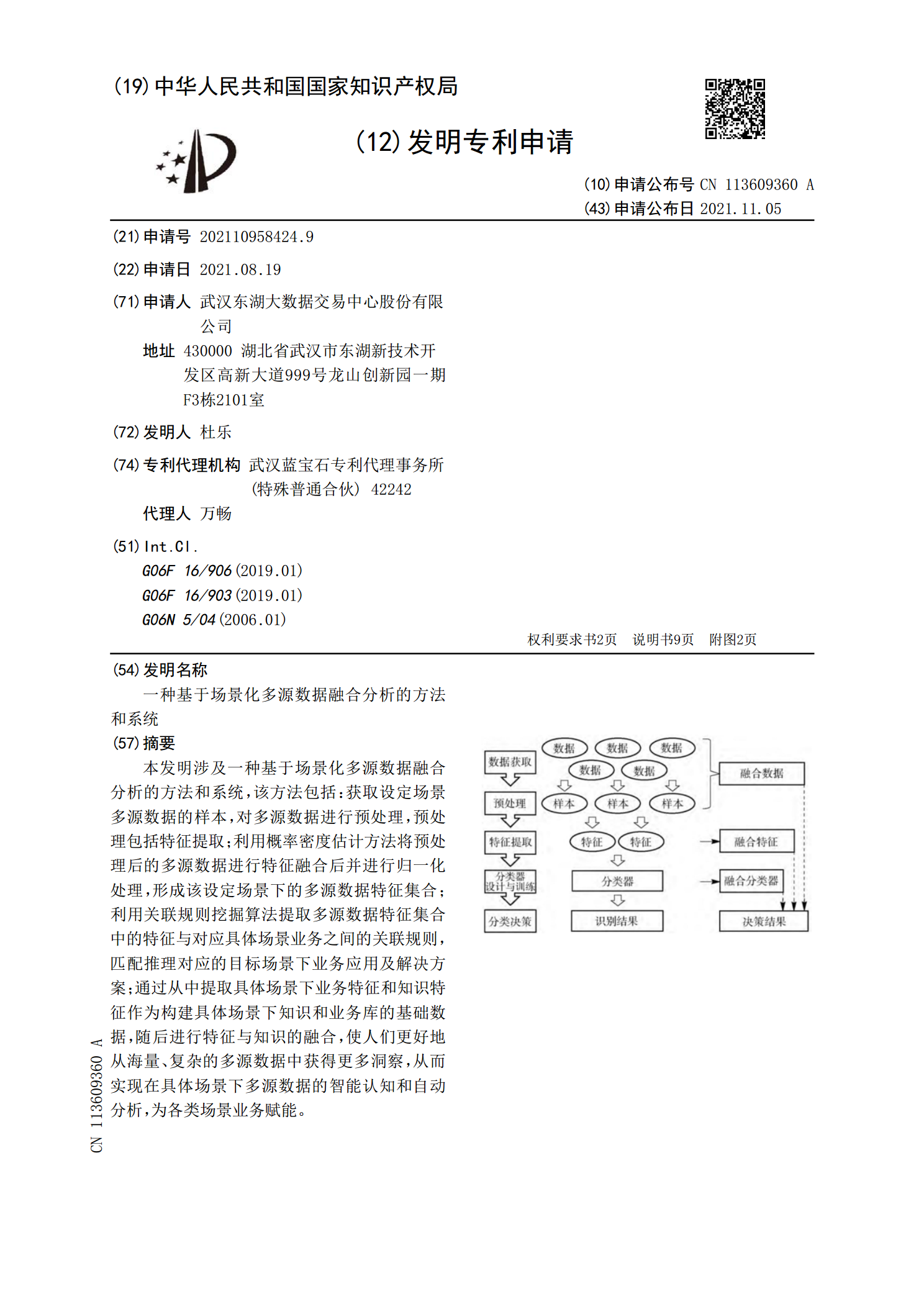
本发明涉及一种基于场景化多源数据融合分析的方法和系统,该方法包括:获取设定场景多源数据的样本,对多源数据进行预处理,预处理包括特征提取;利用概率密度估计方法将预处理后的多源数据进行特征融合后并进行归一化处理,形成该设定场景下的多源数据特征集合;利用关联规则挖掘算法提取多源数据特征集合中的特征与对应具体场景业务之间的关联规则,匹配推理对应的目标场景下业务应用及解决方案;通过从中提取具体场景下业务特征和知识特征作为构建具体场景下知识和业务库的基础数据,随后进行特征与知识的融合,使人们更好地从海量、复杂的多源数