
基于轨迹分析的伴随对象确定方法、装置、设备及介质.pdf

Ja****23


1/10

2/10
3/10

4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于轨迹分析的伴随对象确定方法、装置、设备及介质.pdf
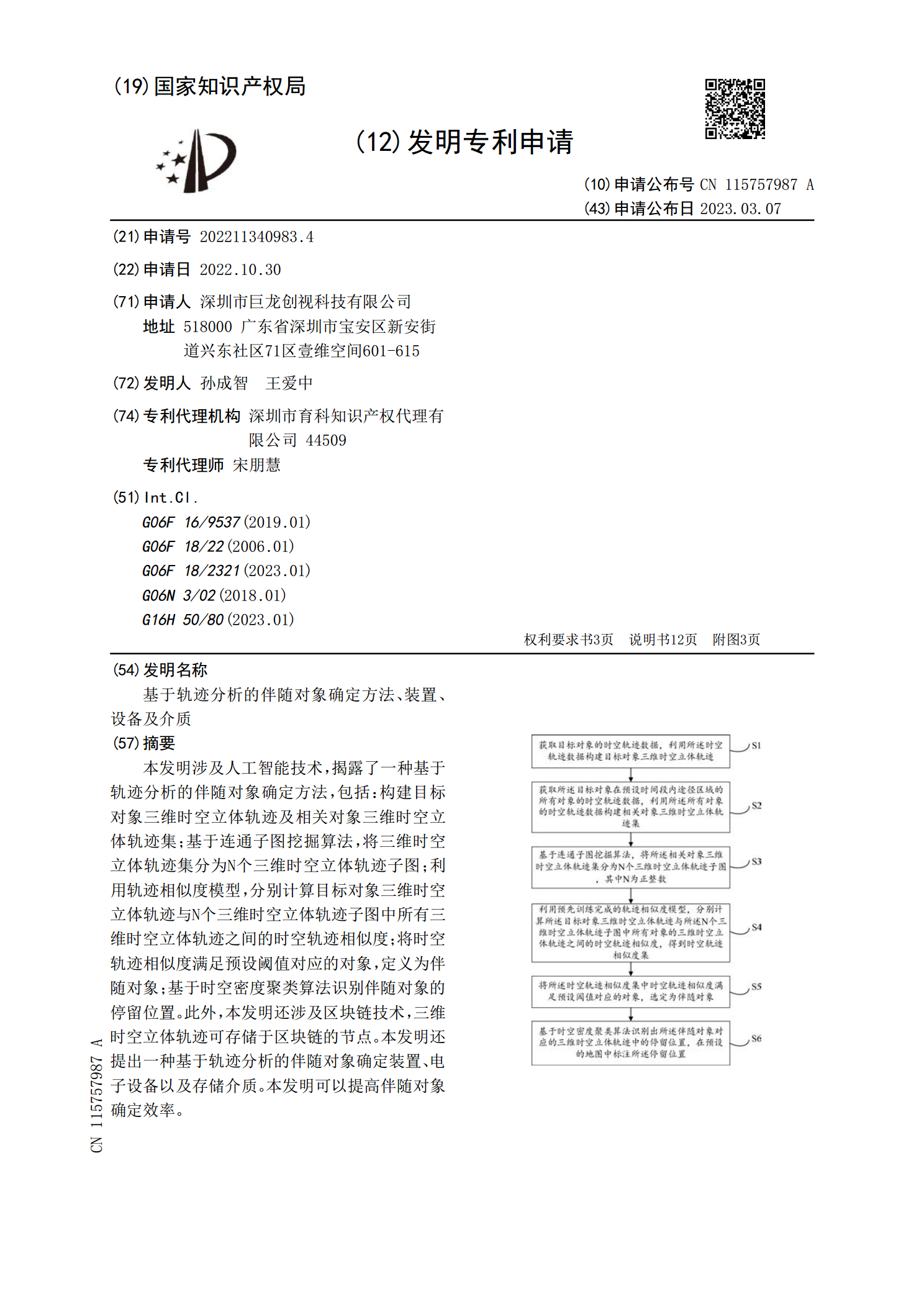
本发明涉及人工智能技术,揭露了一种基于轨迹分析的伴随对象确定方法,包括:构建目标对象三维时空立体轨迹及相关对象三维时空立体轨迹集;基于连通子图挖掘算法,将三维时空立体轨迹集分为N个三维时空立体轨迹子图;利用轨迹相似度模型,分别计算目标对象三维时空立体轨迹与N个三维时空立体轨迹子图中所有三维时空立体轨迹之间的时空轨迹相似度;将时空轨迹相似度满足预设阈值对应的对象,定义为伴随对象;基于时空密度聚类算法识别伴随对象的停留位置。此外,本发明还涉及区块链技术,三维时空立体轨迹可存储于区块链的节点。本发明还提出一种基

基于语义轨迹相似度移动对象伴随关系的分析方法和装置.pdf
本发明公开了一种基于语义轨迹相似度移动对象伴随关系的分析方法和装置,属于信息技术领域。包括:在目标场景内的不同语义停留点设置采集器;采集目标场景内各个移动对象手机的WiFi数据,其包含了该移动对象手机的MAC地址和时间戳;基于每个MAC地址的信息,生成移动对象的语义轨迹序列;计算两个移动对象的语义轨迹序列的最长公共停留点序列和最长公共路径序列;计算两个移动对象的最长公共停留点的分数和最长公共路径的分数;基于上述两个分数计算伴随分数。本发明通过在计算伴随分数时分别对不同停留点、不同路径以及不同日期赋予不同的

基于多轨迹融合的行人轨迹分析方法、装置、设备及介质.pdf
本发明涉及人工智能技术,揭露了一种基于多轨迹融合的行人轨迹分析方法,包括:构建预设空间的三维模型,对该预设空间中不同方位的摄像头抓拍到的监控录像进行分析,以获取不同摄像头监控录像中目标的位置信息、人脸特征及人体特征,进而根据位置信息、人脸特征及人体特征判断不同摄像头中的运动轨迹是否属于同一个目标。此外,本发明还涉及区块链技术,监控画面可存储于区块链的节点。本发明还提出一种基于多轨迹融合的行人轨迹分析装置、电子设备以及存储介质。本发明可以提高进行行人轨迹识别的精确度。
基于六轴机器人的运行轨迹确定方法、装置、设备及介质.pdf
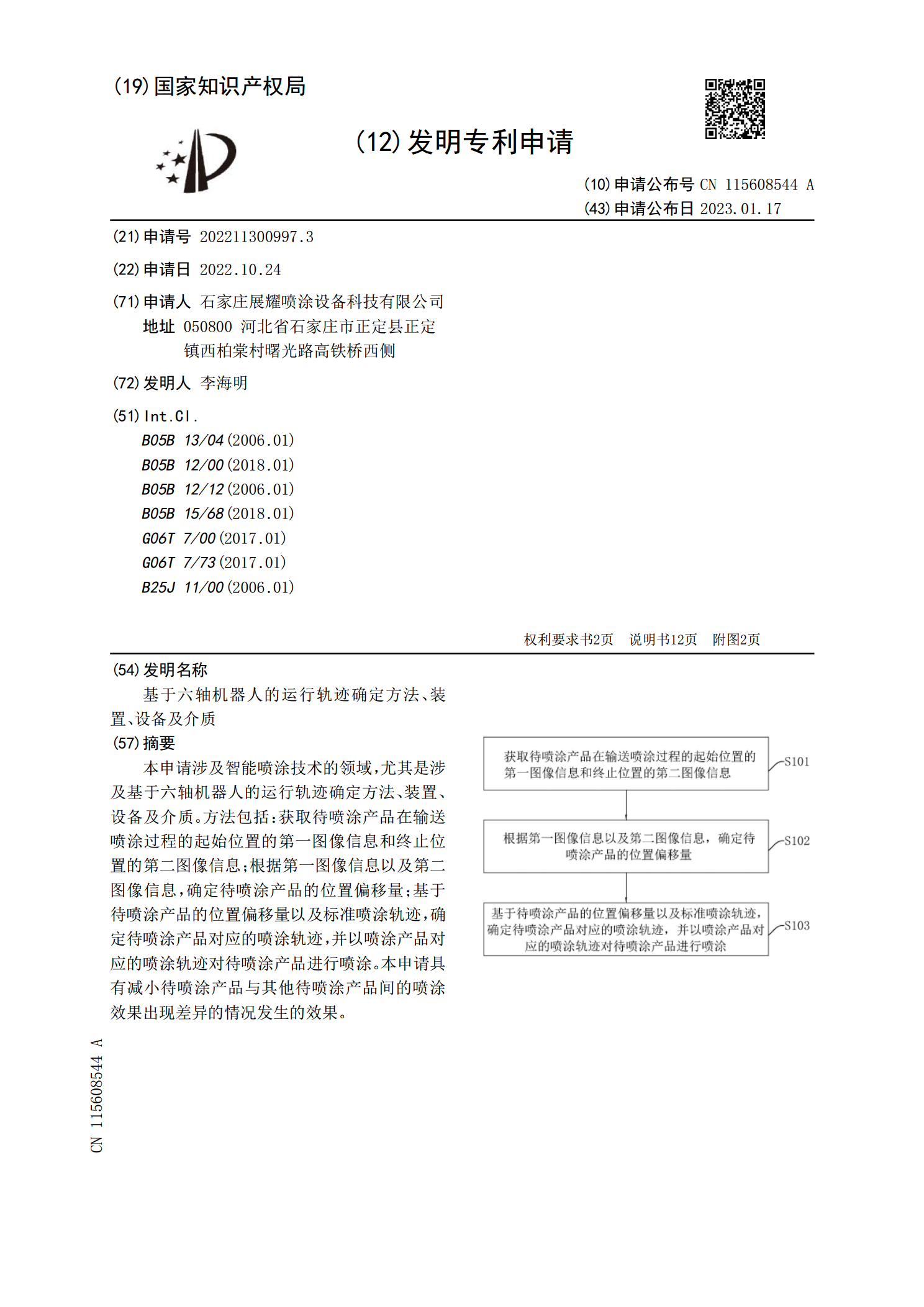
本申请涉及智能喷涂技术的领域,尤其是涉及基于六轴机器人的运行轨迹确定方法、装置、设备及介质。方法包括:获取待喷涂产品在输送喷涂过程的起始位置的第一图像信息和终止位置的第二图像信息;根据第一图像信息以及第二图像信息,确定待喷涂产品的位置偏移量;基于待喷涂产品的位置偏移量以及标准喷涂轨迹,确定待喷涂产品对应的喷涂轨迹,并以喷涂产品对应的喷涂轨迹对待喷涂产品进行喷涂。本申请具有减小待喷涂产品与其他待喷涂产品间的喷涂效果出现差异的情况发生的效果。
目标对象的轨迹确定方法、装置及系统.pdf
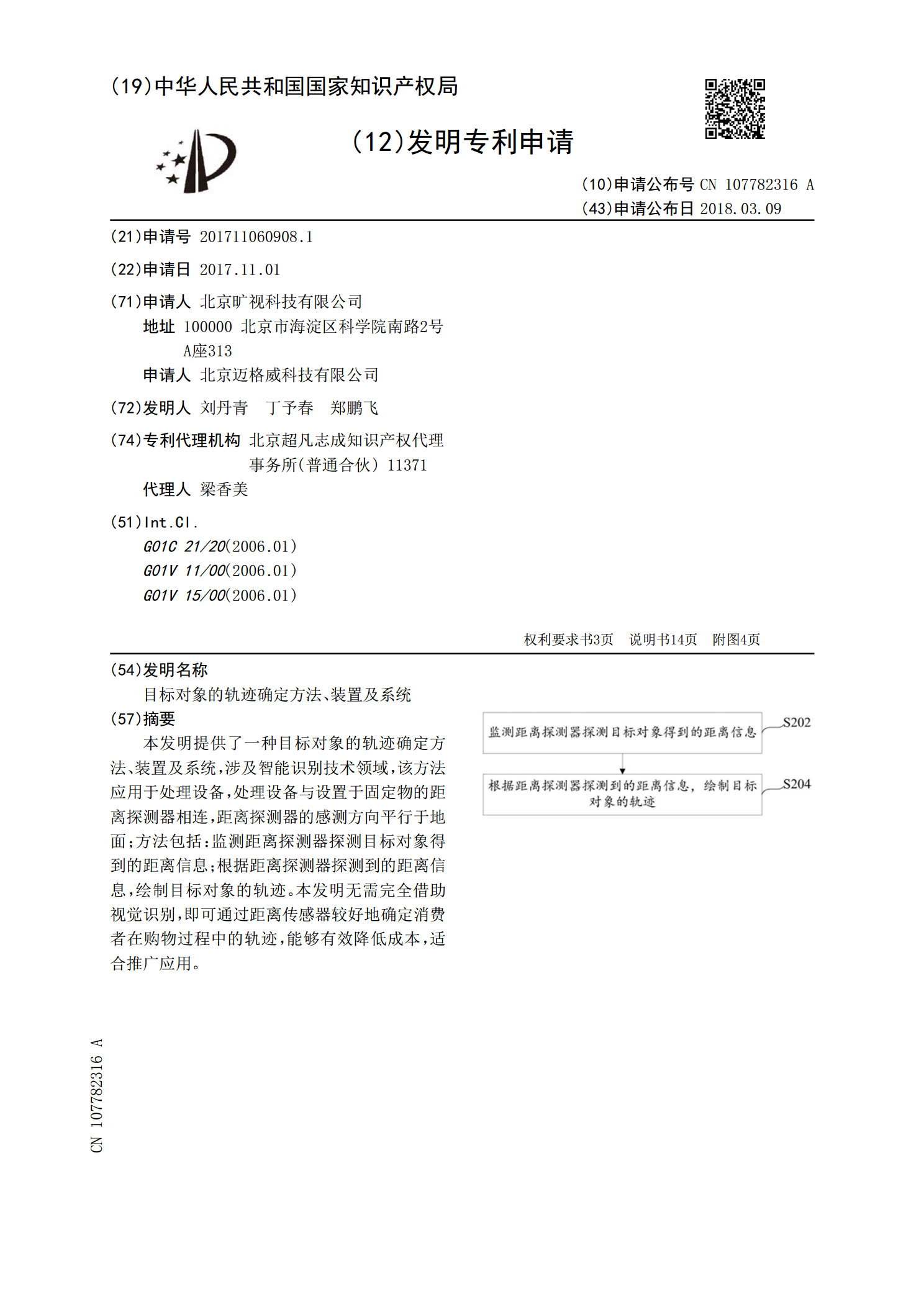
本发明提供了一种目标对象的轨迹确定方法、装置及系统,涉及智能识别技术领域,该方法应用于处理设备,处理设备与设置于固定物的距离探测器相连,距离探测器的感测方向平行于地面;方法包括:监测距离探测器探测目标对象得到的距离信息;根据距离探测器探测到的距离信息,绘制目标对象的轨迹。本发明无需完全借助视觉识别,即可通过距离传感器较好地确定消费者在购物过程中的轨迹,能够有效降低成本,适合推广应用。