
一种零距离测量装置.pdf

Wi****m7

1/6
2/6
3/6

4/6

5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种零距离测量装置.pdf
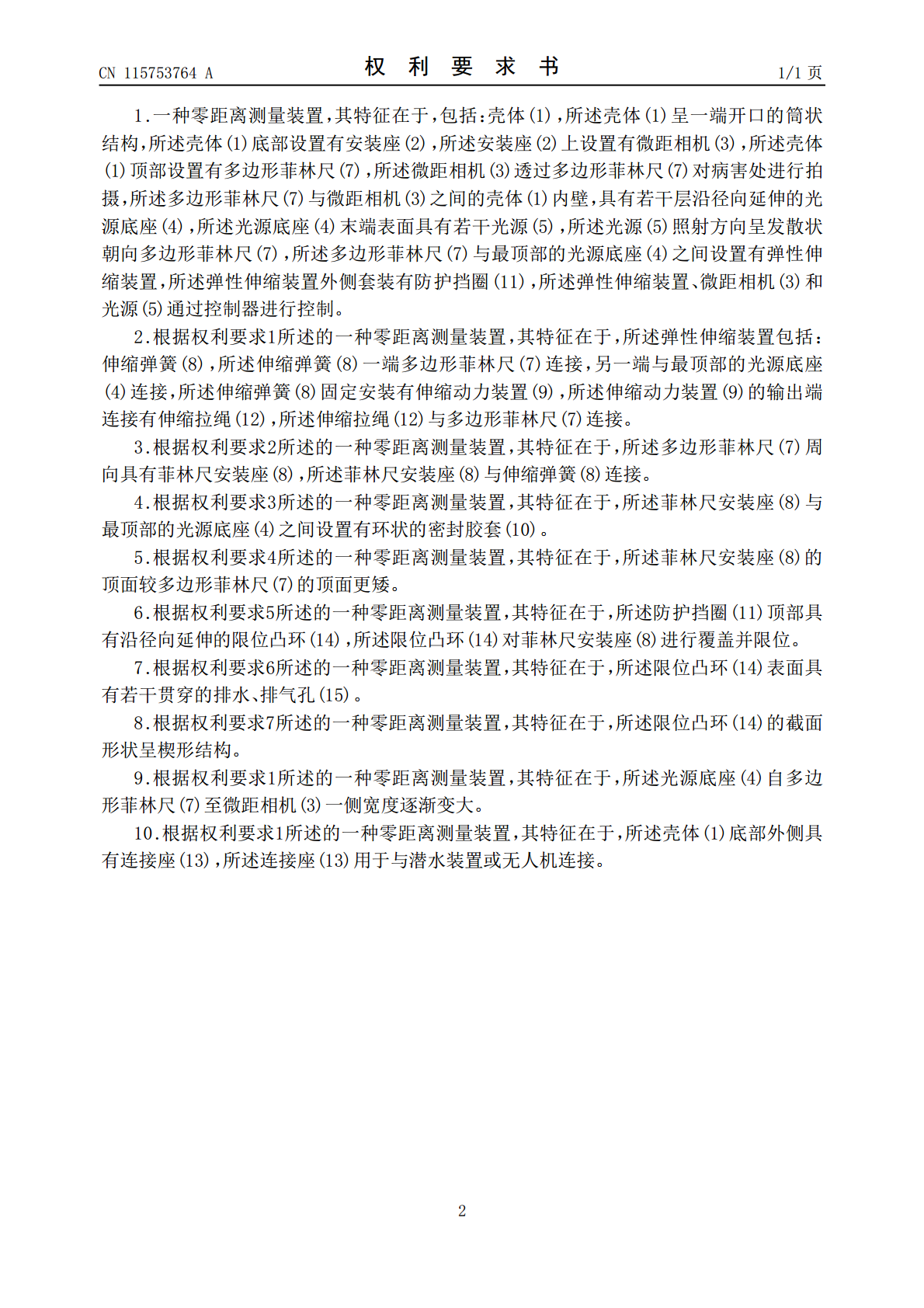
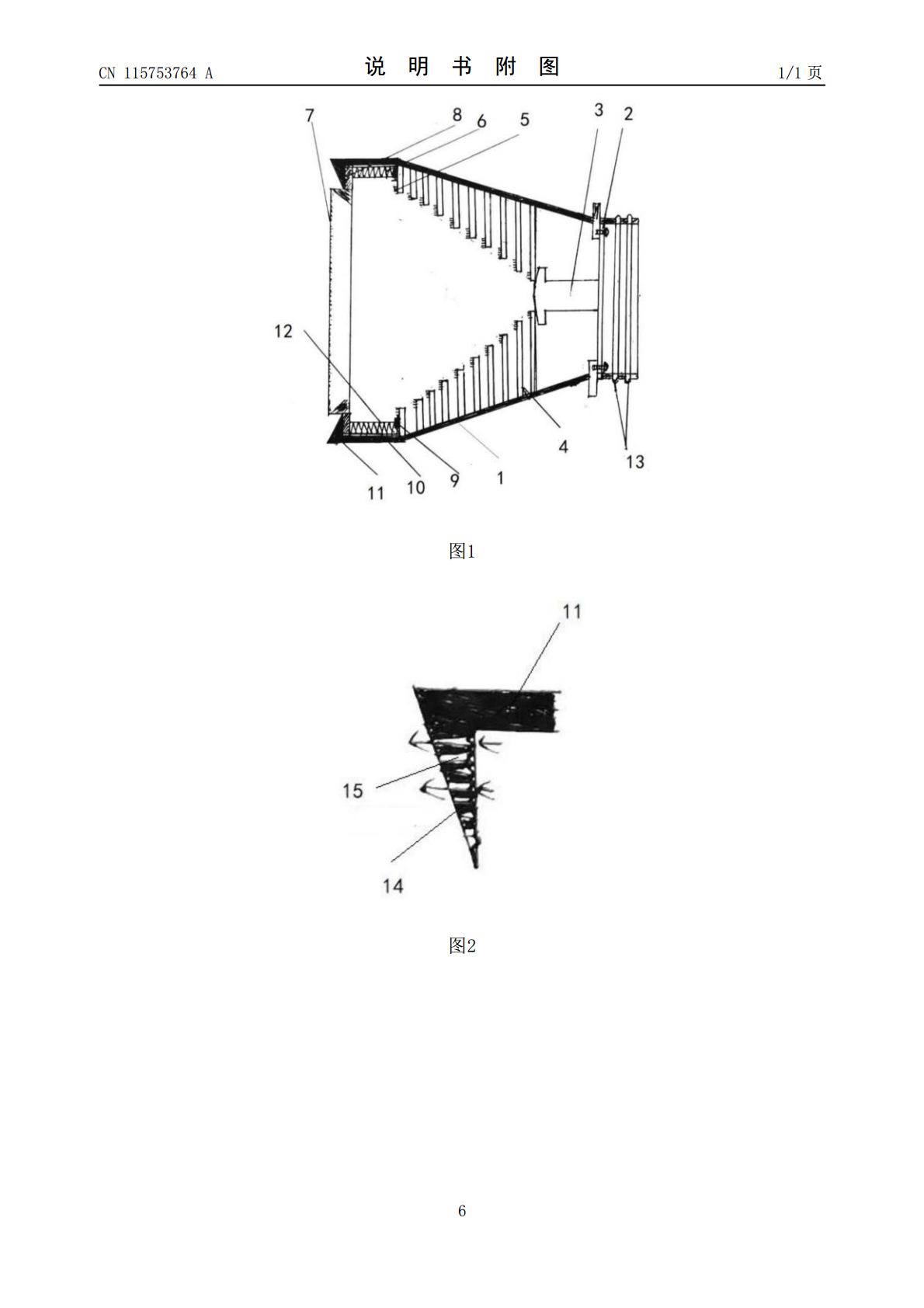
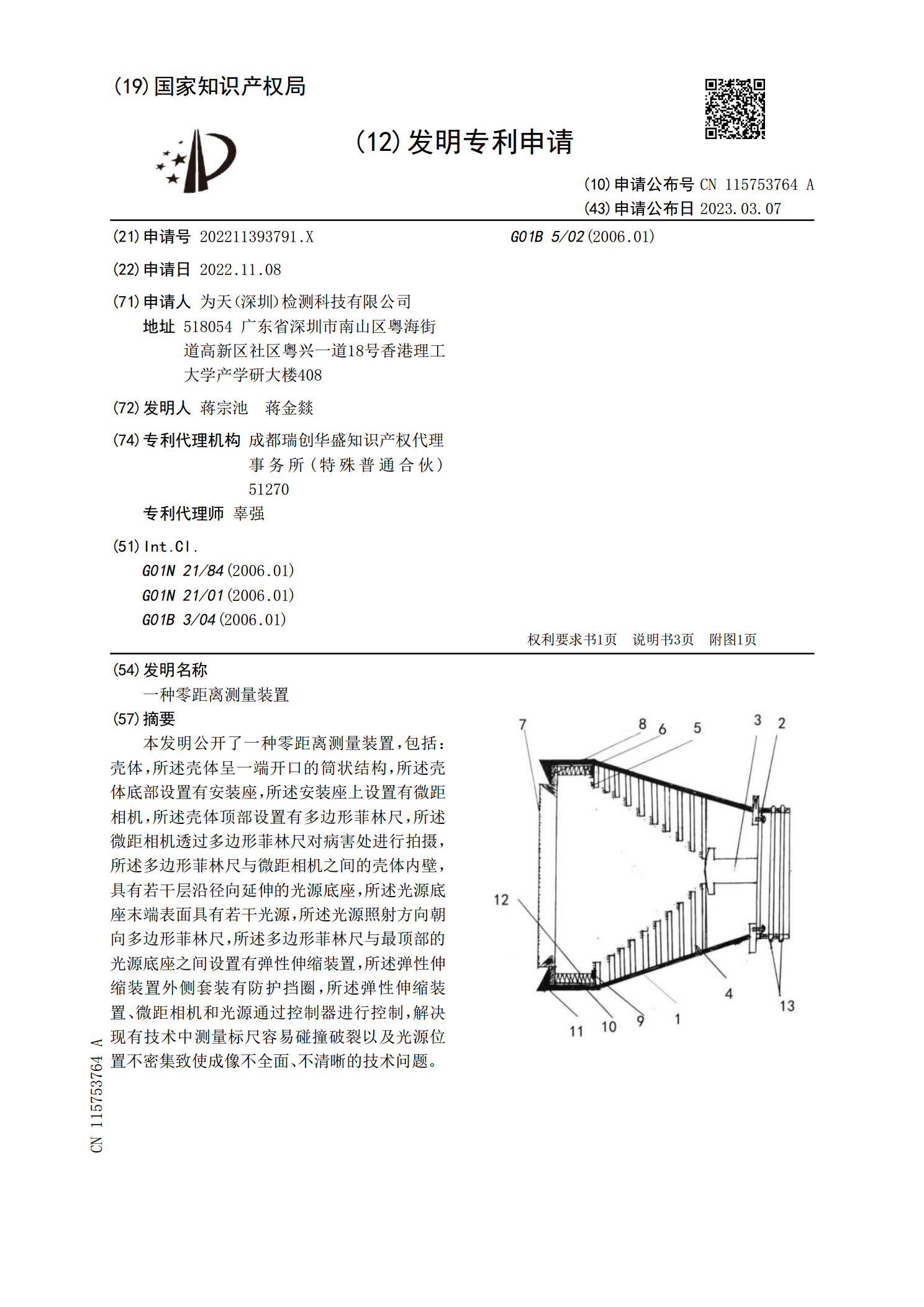
本发明公开了一种零距离测量装置,包括:壳体,所述壳体呈一端开口的筒状结构,所述壳体底部设置有安装座,所述安装座上设置有微距相机,所述壳体顶部设置有多边形菲林尺,所述微距相机透过多边形菲林尺对病害处进行拍摄,所述多边形菲林尺与微距相机之间的壳体内壁,具有若干层沿径向延伸的光源底座,所述光源底座末端表面具有若干光源,所述光源照射方向朝向多边形菲林尺,所述多边形菲林尺与最顶部的光源底座之间设置有弹性伸缩装置,所述弹性伸缩装置外侧套装有防护挡圈,所述弹性伸缩装置、微距相机和光源通过控制器进行控制,解决现有技术中测

一种测量装置.pdf
本发明公开了一种检测装置,由测量柱1、锥套2、底盘3、小螺钉4、压盖5、大螺钉6、定位柱7、手柄8组成,定位柱7通过压盖5和大螺钉6安装在底盘3上,测量柱1通过锥套2和小螺钉4安装在底盘3上,锥套2的内径是锥形的,测量柱1的外径是锥形的,这样便于更换测量柱1,手柄8安装在底盘3上。本发明能满足车轮制造企业对车轮位置度检测的需要,能适应多种螺栓孔直径和中心孔直径的螺栓孔位置度的检测。同时具有结构简单、便于制作、性能稳定、精度能满足加工要求、制造成本低的特点。

一种测量装置.pdf
本发明公开了一种测量装置,主要百分表1、紧定螺钉2、表杆3、滑动杆4、辅助定位盘5、大弹簧6、锁紧螺母7、小弹簧8、测头9、端盖10、定位螺钉12组成,百分表1通过滑动杆4、大弹簧6、端盖10和紧定螺钉2安装在表杆3上,测头9通过小弹簧8和锁紧螺母7安装在表杆3上,辅助定位盘5通过定位螺钉12安装在表杆3上,辅助定位盘5更好的保证表杆与被测孔中心线重合,即三个测头同时接触圆柱面的同一区间。本发明能满足车轮制造企业对车轮分瓣式中心孔内径检测的需要,能适应多种不同分瓣数量角度的中心孔内径的检测。同

一种测量装置.pdf
本发明提供了一种测量装置,用于检测发动机合件中的凸轮轴轴瓦的下沿与气门的上端面在竖直方向上的距离。其包括机体组件、滑动装配在机体组件的滑台、设置在机体组件的标定组件。标定组件包括标定轴瓦、及标定气门上端面。测量装置还包括设置在滑台下方的平台组件、及滑动装配在滑台上且在第一设定位置及第二设定位置之间滑动的检测组件。检测组件包括用于检测凸轮轴轴瓦相对标定轴瓦在竖直方向上的位移偏移量的第一位移传感器,以及用于检测气门的上端面相对标定气门上端面在竖直方向上的位移偏移量的第二位移传感器。通过采用位移传感器进行相应的
一种测量装置.pdf
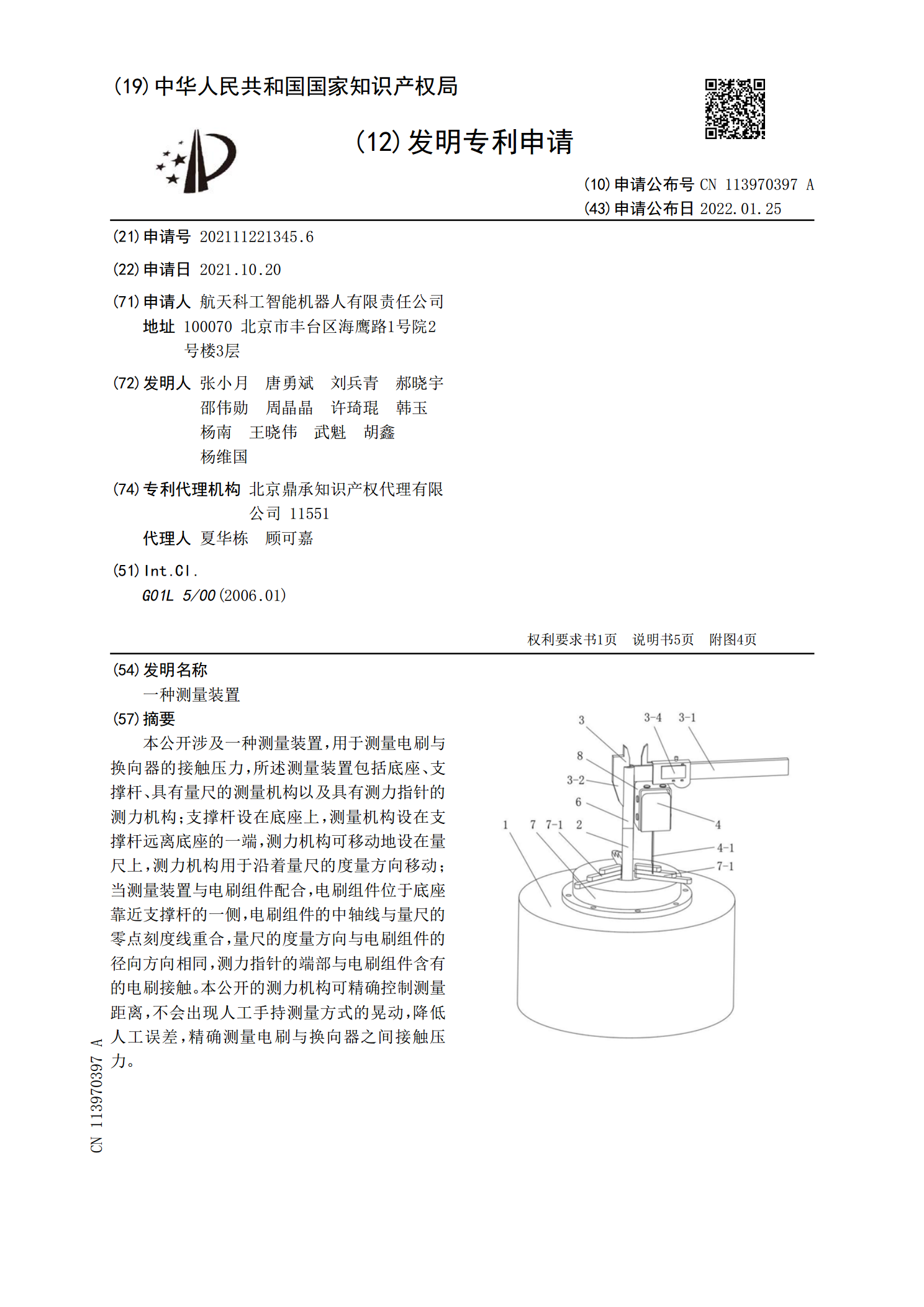
本公开涉及一种测量装置,用于测量电刷与换向器的接触压力,所述测量装置包括底座、支撑杆、具有量尺的测量机构以及具有测力指针的测力机构;支撑杆设在底座上,测量机构设在支撑杆远离底座的一端,测力机构可移动地设在量尺上,测力机构用于沿着量尺的度量方向移动;当测量装置与电刷组件配合,电刷组件位于底座靠近支撑杆的一侧,电刷组件的中轴线与量尺的零点刻度线重合,量尺的度量方向与电刷组件的径向方向相同,测力指针的端部与电刷组件含有的电刷接触。本公开的测力机构可精确控制测量距离,不会出现人工手持测量方式的晃动,降低人工误差,