
一种伞降式无人机遥控中断后自主返航回收控制方法.pdf

是来****文章

1/9
2/9
3/9
4/9
5/9
6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种伞降式无人机遥控中断后自主返航回收控制方法.pdf
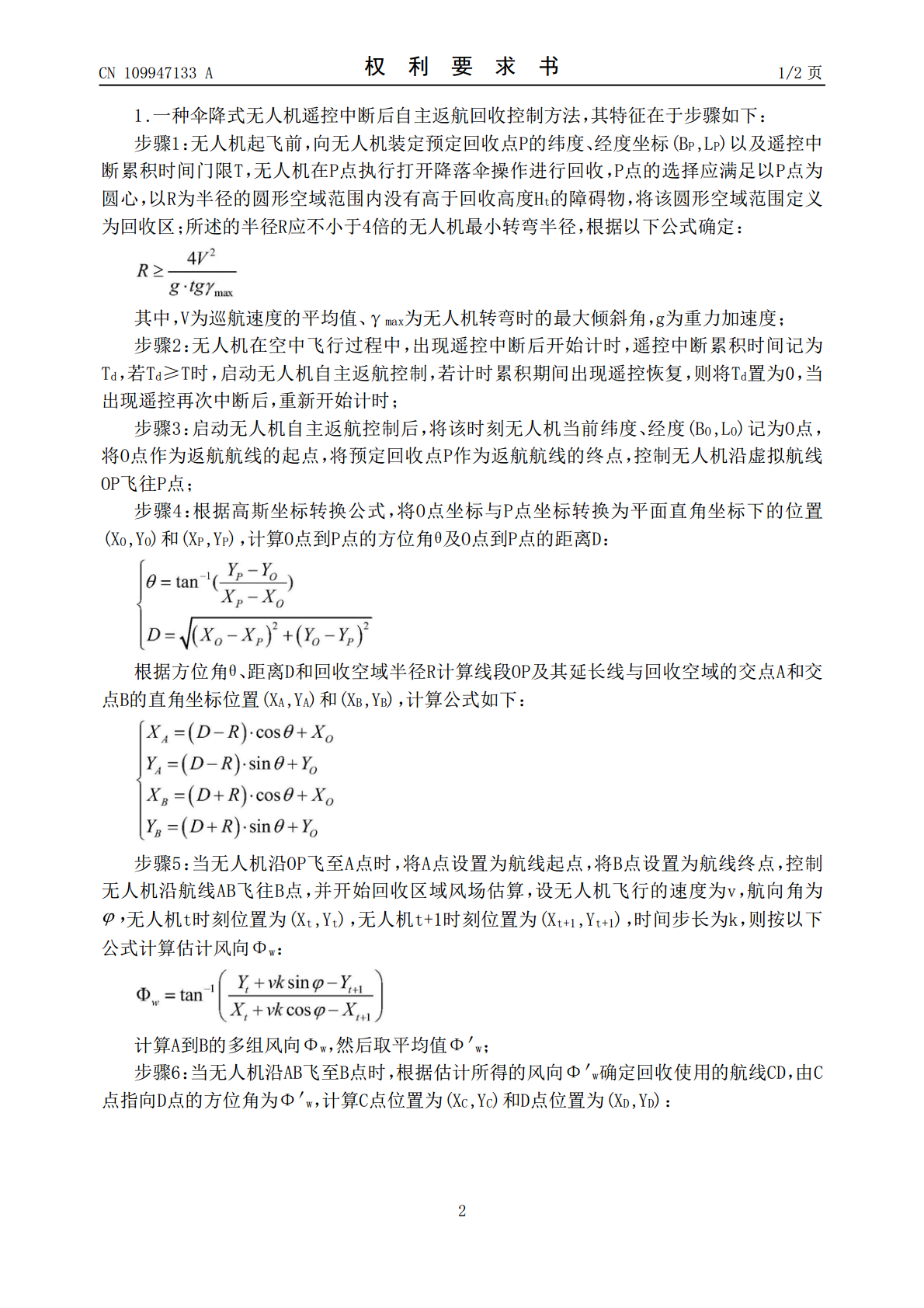
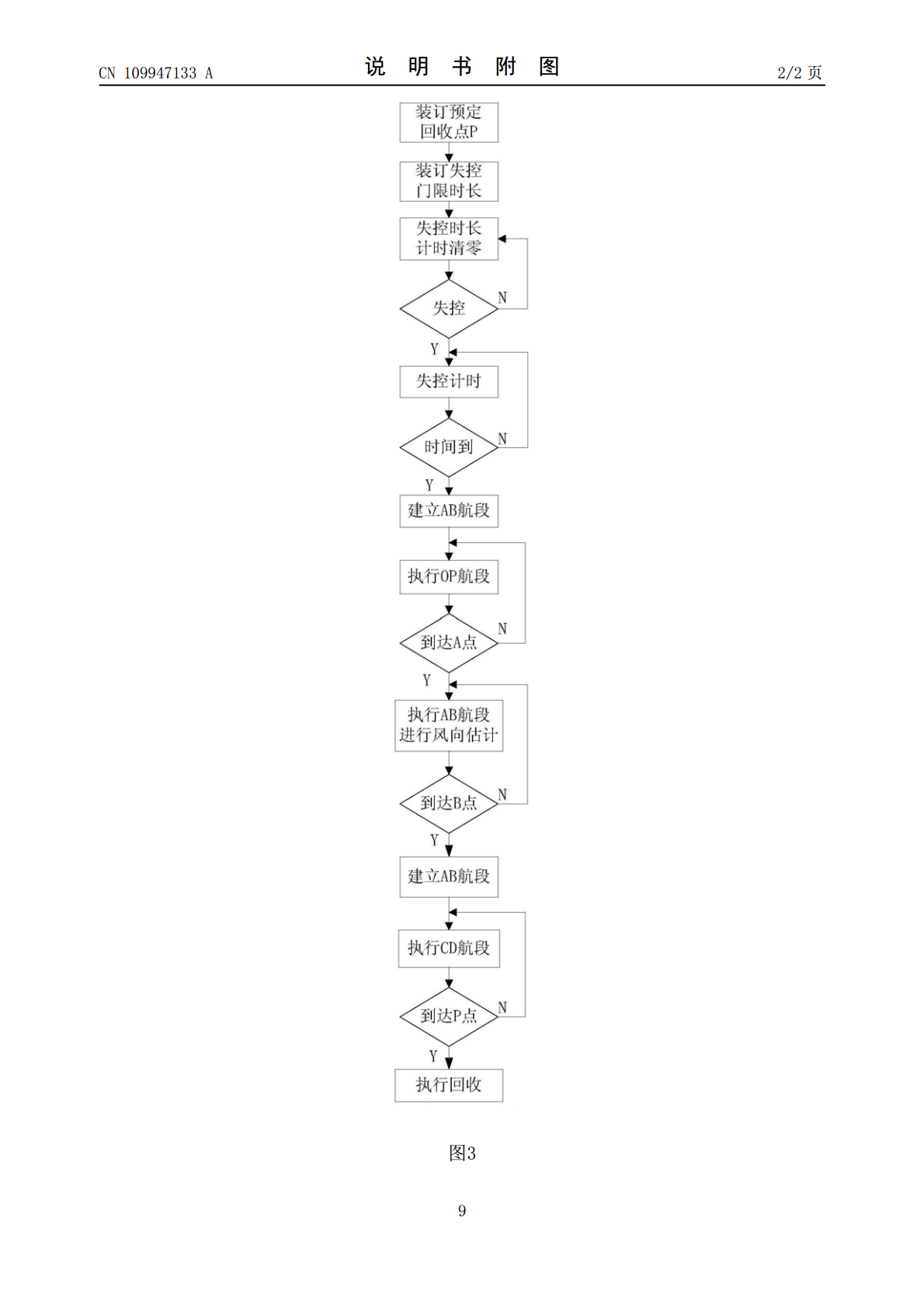
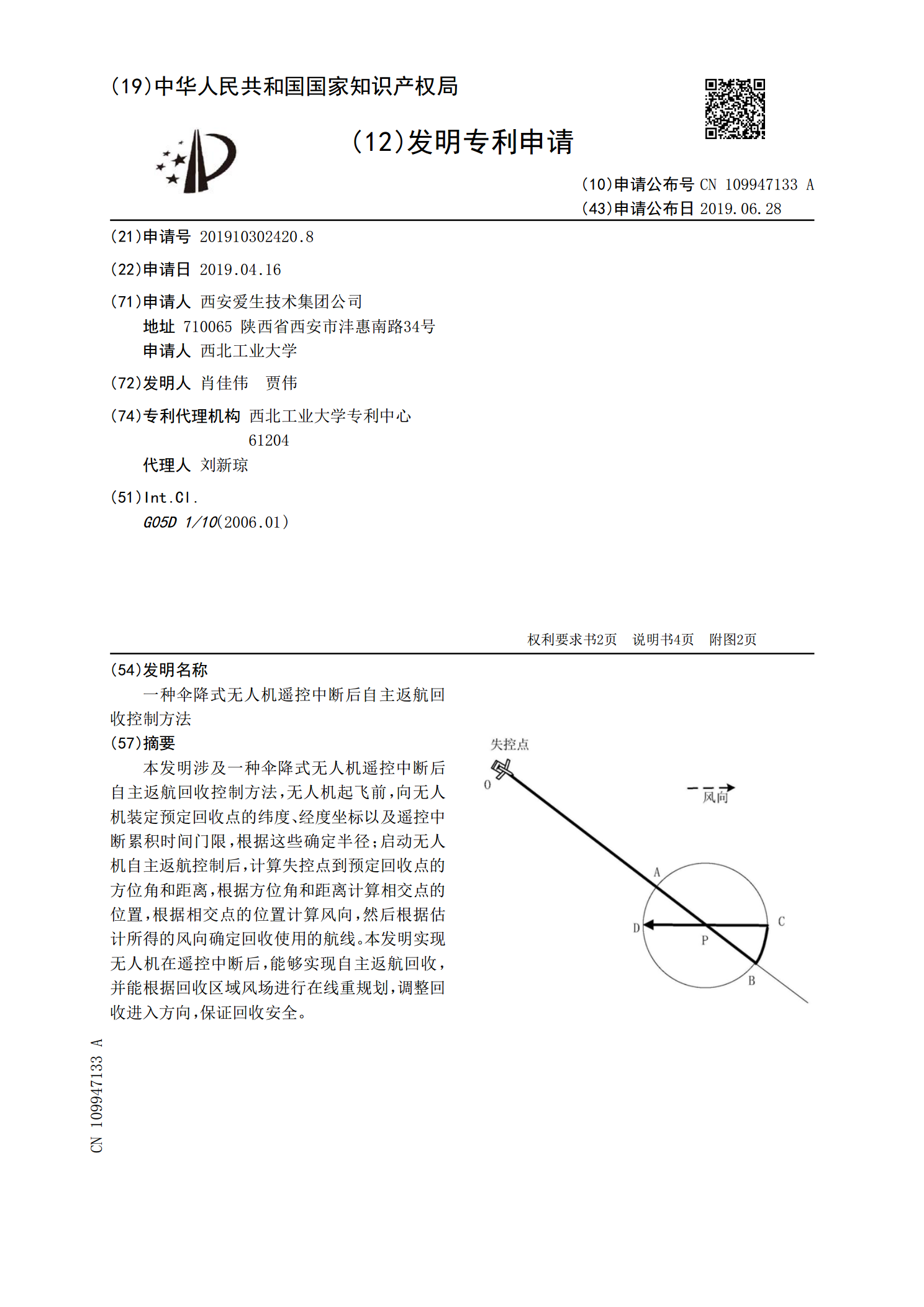
本发明涉及一种伞降式无人机遥控中断后自主返航回收控制方法,无人机起飞前,向无人机装定预定回收点的纬度、经度坐标以及遥控中断累积时间门限,根据这些确定半径;启动无人机自主返航控制后,计算失控点到预定回收点的方位角和距离,根据方位角和距离计算相交点的位置,根据相交点的位置计算风向,然后根据估计所得的风向确定回收使用的航线。本发明实现无人机在遥控中断后,能够实现自主返航回收,并能根据回收区域风场进行在线重规划,调整回收进入方向,保证回收安全。
一种伞降无人机自主回收方法.pdf
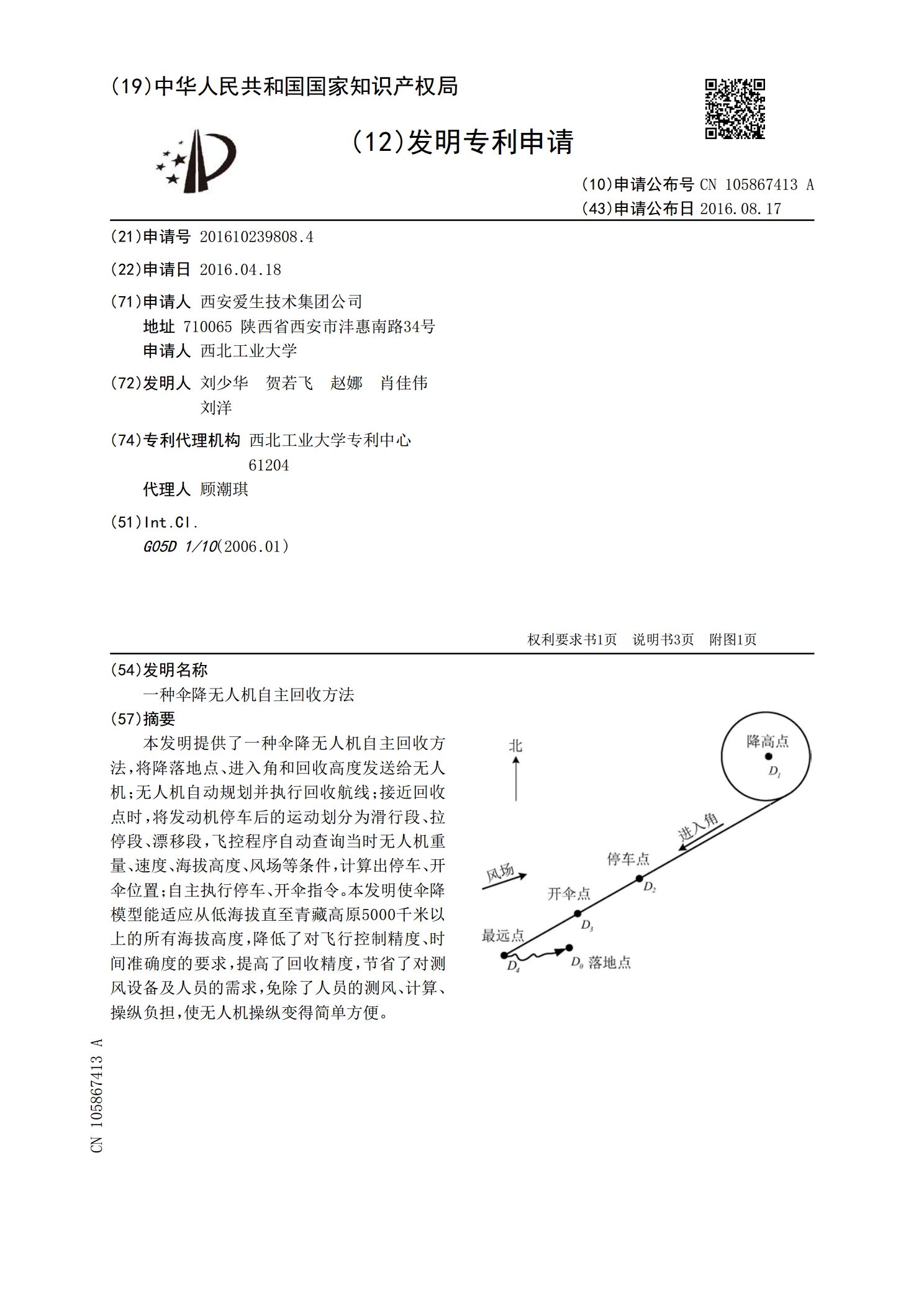
本发明提供了一种伞降无人机自主回收方法,将降落地点、进入角和回收高度发送给无人机;无人机自动规划并执行回收航线;接近回收点时,将发动机停车后的运动划分为滑行段、拉停段、漂移段,飞控程序自动查询当时无人机重量、速度、海拔高度、风场等条件,计算出停车、开伞位置;自主执行停车、开伞指令。本发明使伞降模型能适应从低海拔直至青藏高原5000千米以上的所有海拔高度,降低了对飞行控制精度、时间准确度的要求,提高了回收精度,节省了对测风设备及人员的需求,免除了人员的测风、计算、操纵负担,使无人机操纵变得简单方便。
伞降固定翼无人机自主定点回收方法.pdf
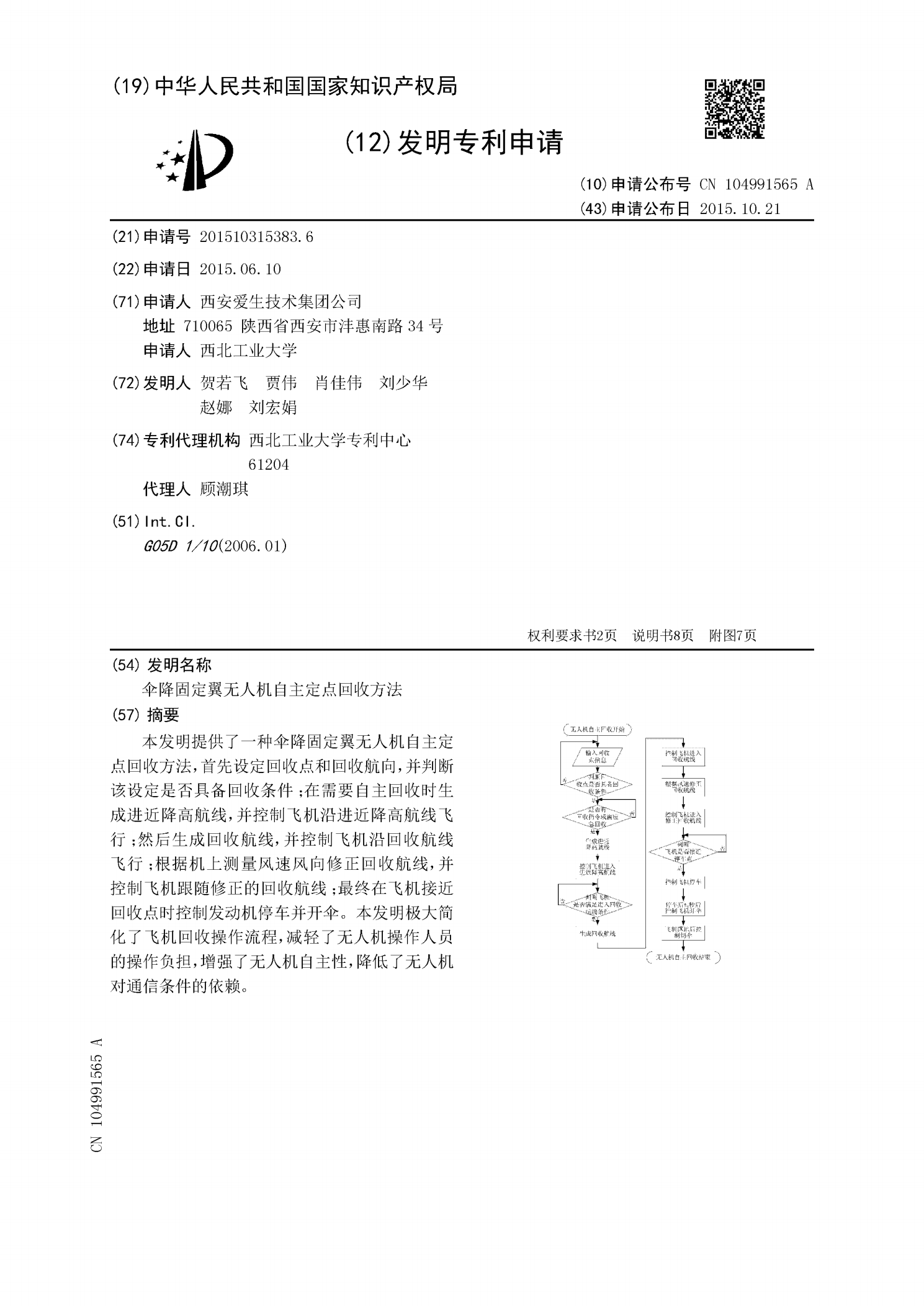
本发明提供了一种伞降固定翼无人机自主定点回收方法,首先设定回收点和回收航向,并判断该设定是否具备回收条件;在需要自主回收时生成进近降高航线,并控制飞机沿进近降高航线飞行;然后生成回收航线,并控制飞机沿回收航线飞行;根据机上测量风速风向修正回收航线,并控制飞机跟随修正的回收航线;最终在飞机接近回收点时控制发动机停车并开伞。本发明极大简化了飞机回收操作流程,减轻了无人机操作人员的操作负担,增强了无人机自主性,降低了无人机对通信条件的依赖。
一种无人机伞降回收载荷测量装置及方法.pdf
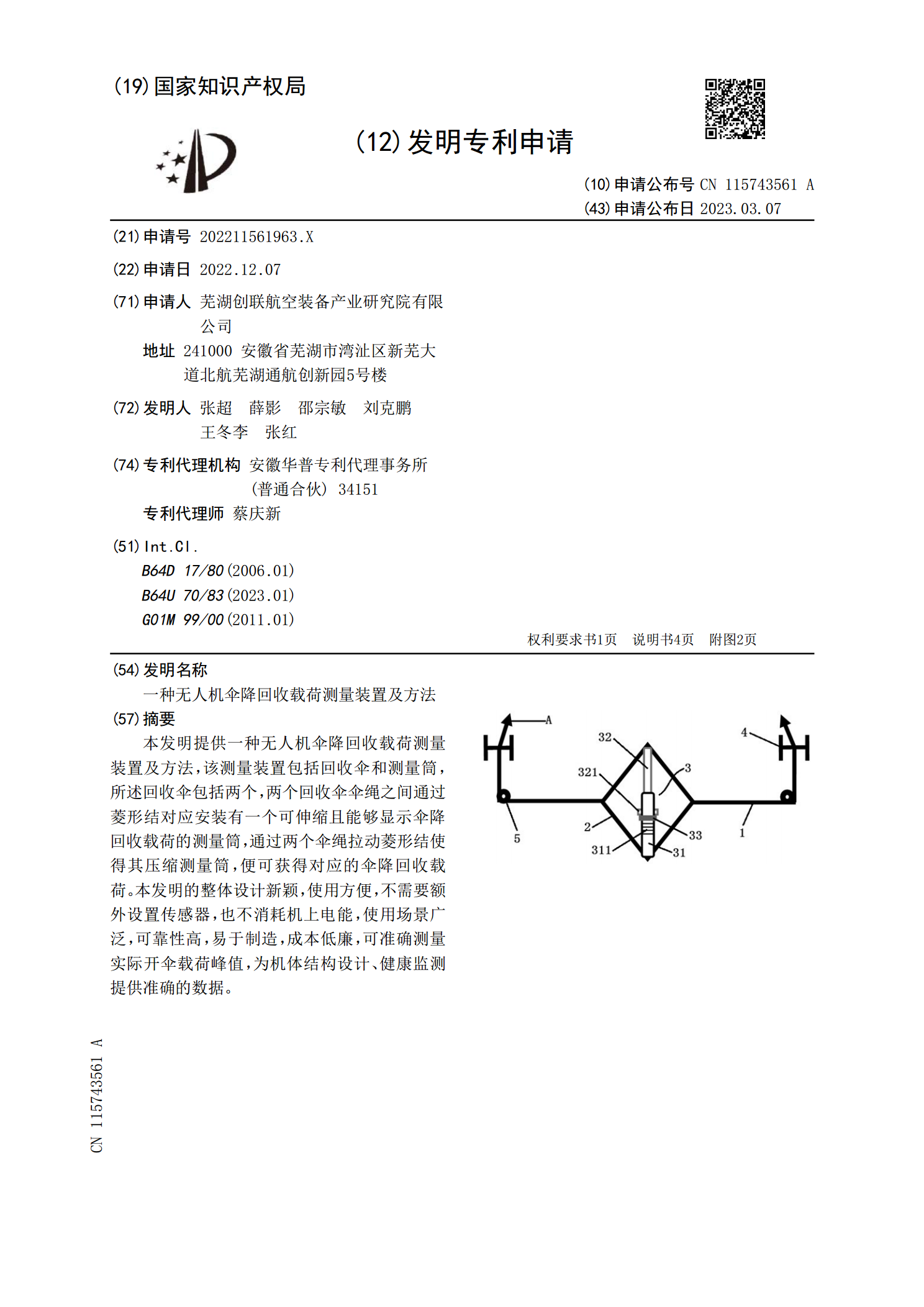
本发明提供一种无人机伞降回收载荷测量装置及方法,该测量装置包括回收伞和测量筒,所述回收伞包括两个,两个回收伞伞绳之间通过菱形结对应安装有一个可伸缩且能够显示伞降回收载荷的测量筒,通过两个伞绳拉动菱形结使得其压缩测量筒,便可获得对应的伞降回收载荷。本发明的整体设计新颖,使用方便,不需要额外设置传感器,也不消耗机上电能,使用场景广泛,可靠性高,易于制造,成本低廉,可准确测量实际开伞载荷峰值,为机体结构设计、健康监测提供准确的数据。

旋翼无人机位姿控制与自主返航技术.docx
旋翼无人机位姿控制与自主返航技术标题:旋翼无人机位姿控制与自主返航技术摘要:随着无人机技术的快速发展,旋翼无人机在航空领域的应用日益广泛。位姿控制和自主返航技术作为关键技术,对于无人机的稳定飞行和安全操作至关重要。本文综述了旋翼无人机位姿控制的方法及相关算法,并介绍了自主返航技术的原理和实现方法,旨在为无人机实现更高效、稳定、安全的飞行提供技术支持。1.引言无人机作为一种新型的航空工具,具有灵活机动、低成本和多功能等优势,在多个领域得到广泛应用。位姿控制和自主返航技术是无人机飞行的重要组成部分,对实现无人