
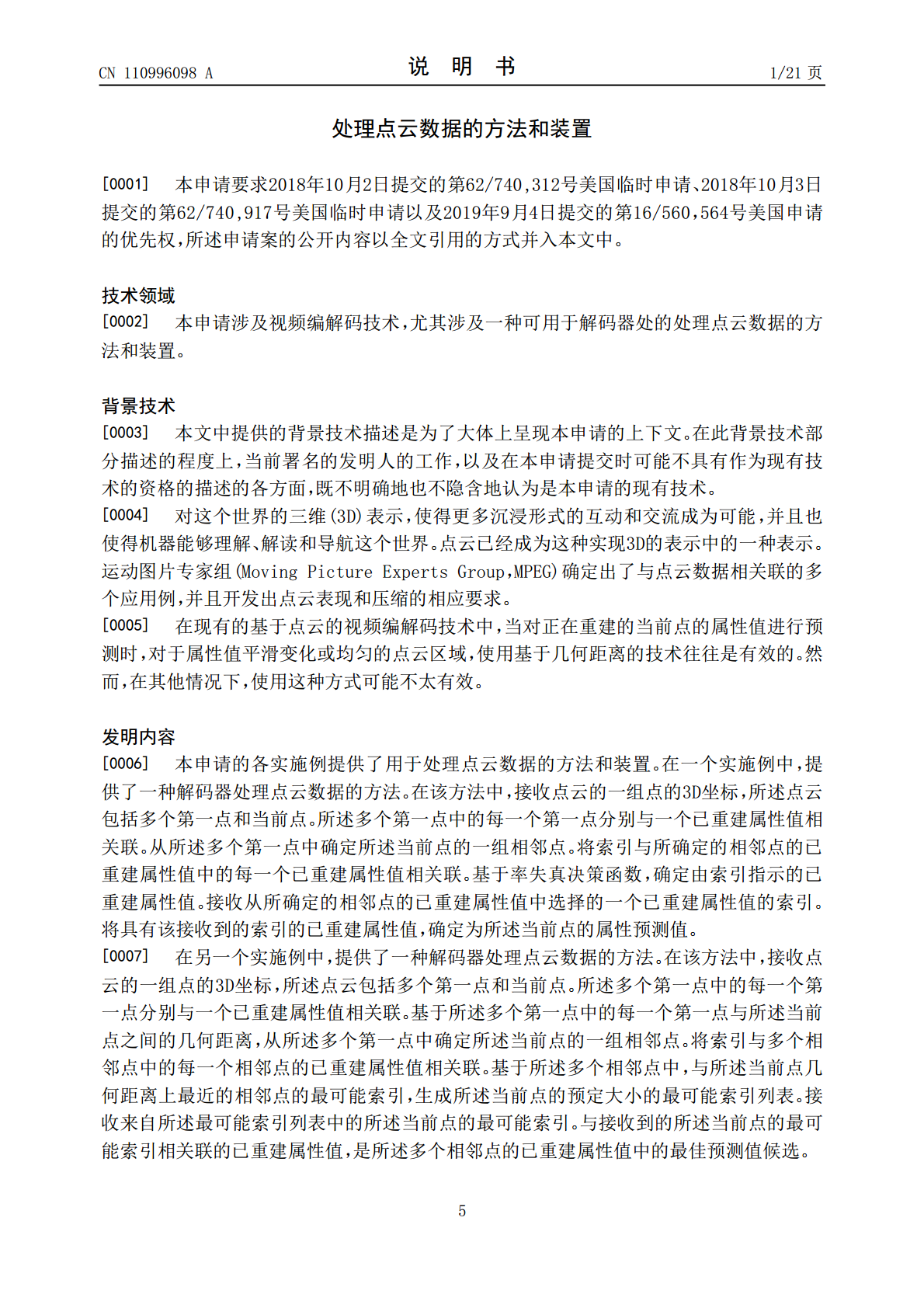
处理点云数据的方法和装置.pdf

白凡****12

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共35页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
处理点云数据的方法和装置.pdf
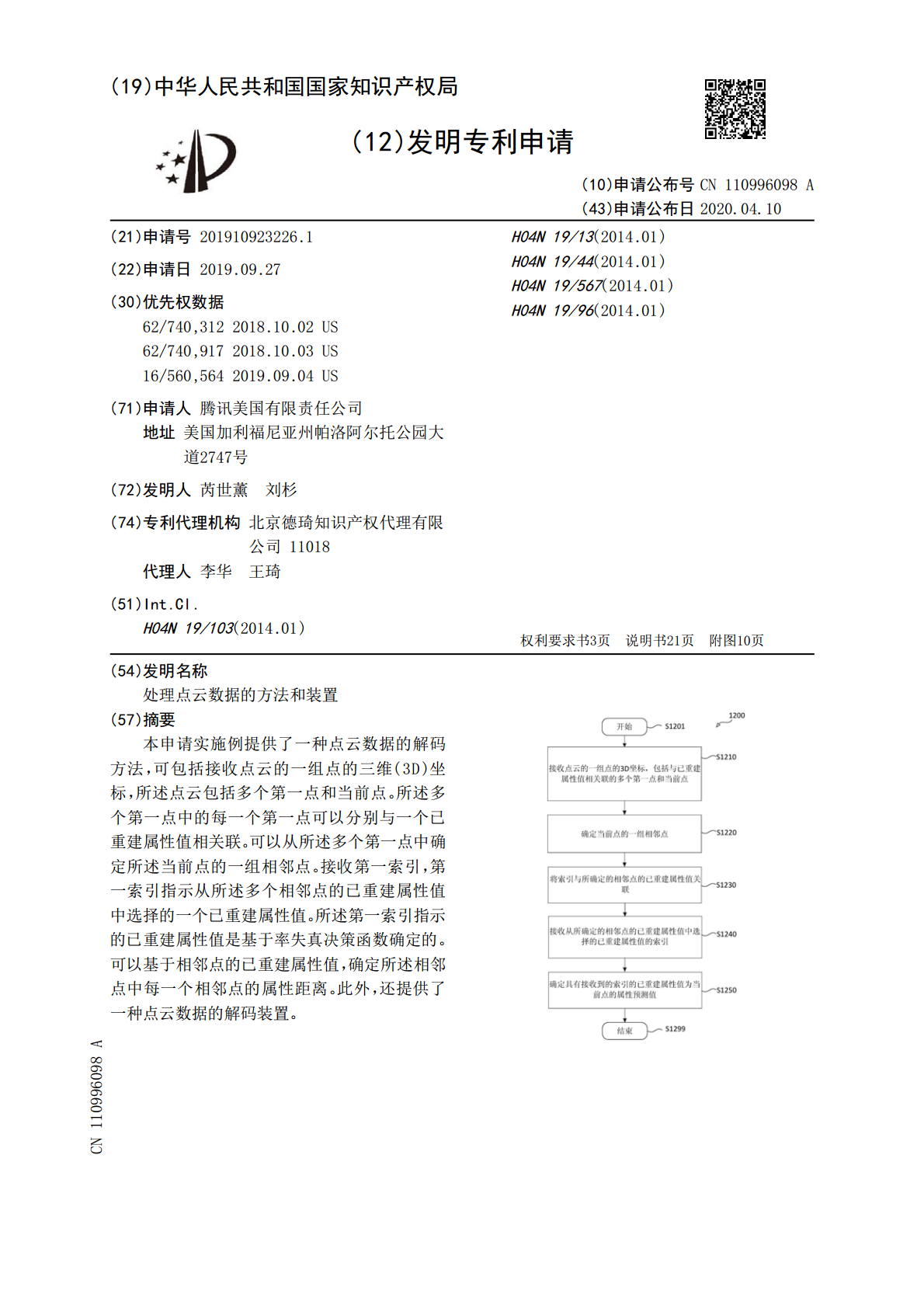
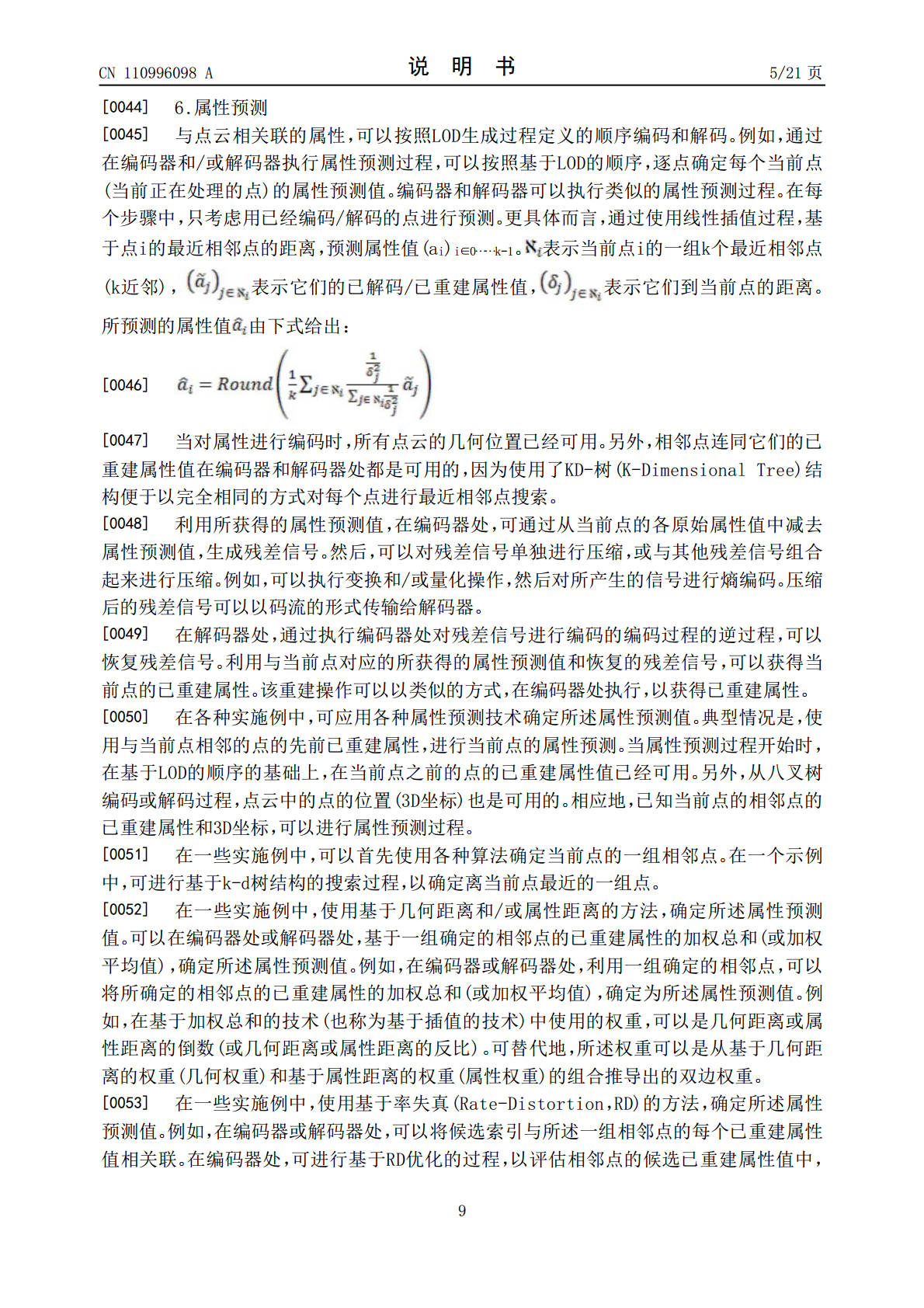
本申请实施例提供了一种点云数据的解码方法,可包括接收点云的一组点的三维(3D)坐标,所述点云包括多个第一点和当前点。所述多个第一点中的每一个第一点可以分别与一个已重建属性值相关联。可以从所述多个第一点中确定所述当前点的一组相邻点。接收第一索引,第一索引指示从所述多个相邻点的已重建属性值中选择的一个已重建属性值。所述第一索引指示的已重建属性值是基于率失真决策函数确定的。可以基于相邻点的已重建属性值,确定所述相邻点中每一个相邻点的属性距离。此外,还提供了一种点云数据的解码装置。

点云数据处理方法和装置.pdf
本申请公开了一种点云数据处理方法和装置。该方法包括:获取点云分布图像;对点云数据进行分组;从点云数据集合中确定参考点集;根据参考点集确定地面参考线;根据地面参考线判断每组中与地面参考线对应的点云是否属于地面。本申请达到了识别点云是否属于地面的目的,从而使得机器人能高效区分视线范围内的障碍物与地面,包括平地、小沟壑、斜坡这些不影响通过性的场景,为机器人在极复杂场景下进行灵活自主避障打下了前端基础。并且本申请的技术方案,采用普通的深度摄像头拍摄的图像就可以实现地面点云的有效识别,不需要价格高昂的工业级摄像头,
点云数据处理方法和装置.pdf
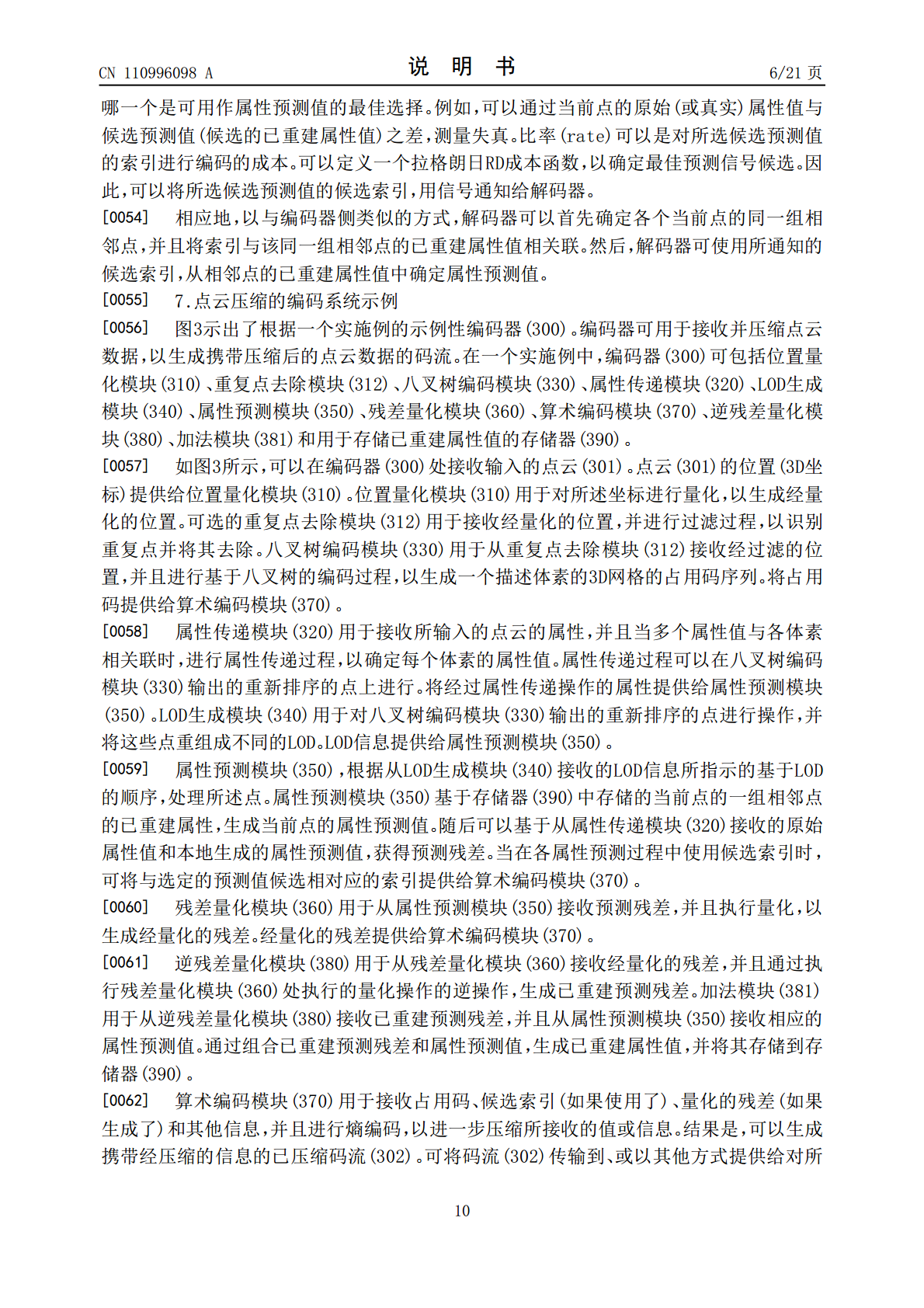
一种在解码器处理点云数据的方法,包括接收点云的一组点的三维(3D)坐标,该点云的所述一组点包括多个第一点和当前点。每一个第一点可以与重建属性值相关联。可以从第一点确定当前点的一组相邻点。可以基于相邻点的重建属性值确定每一个相邻点的属性距离。可以基于相邻点的属性距离确定当前点的属性预测。
点云数据发送装置、发送方法、处理装置和处理方法.pdf
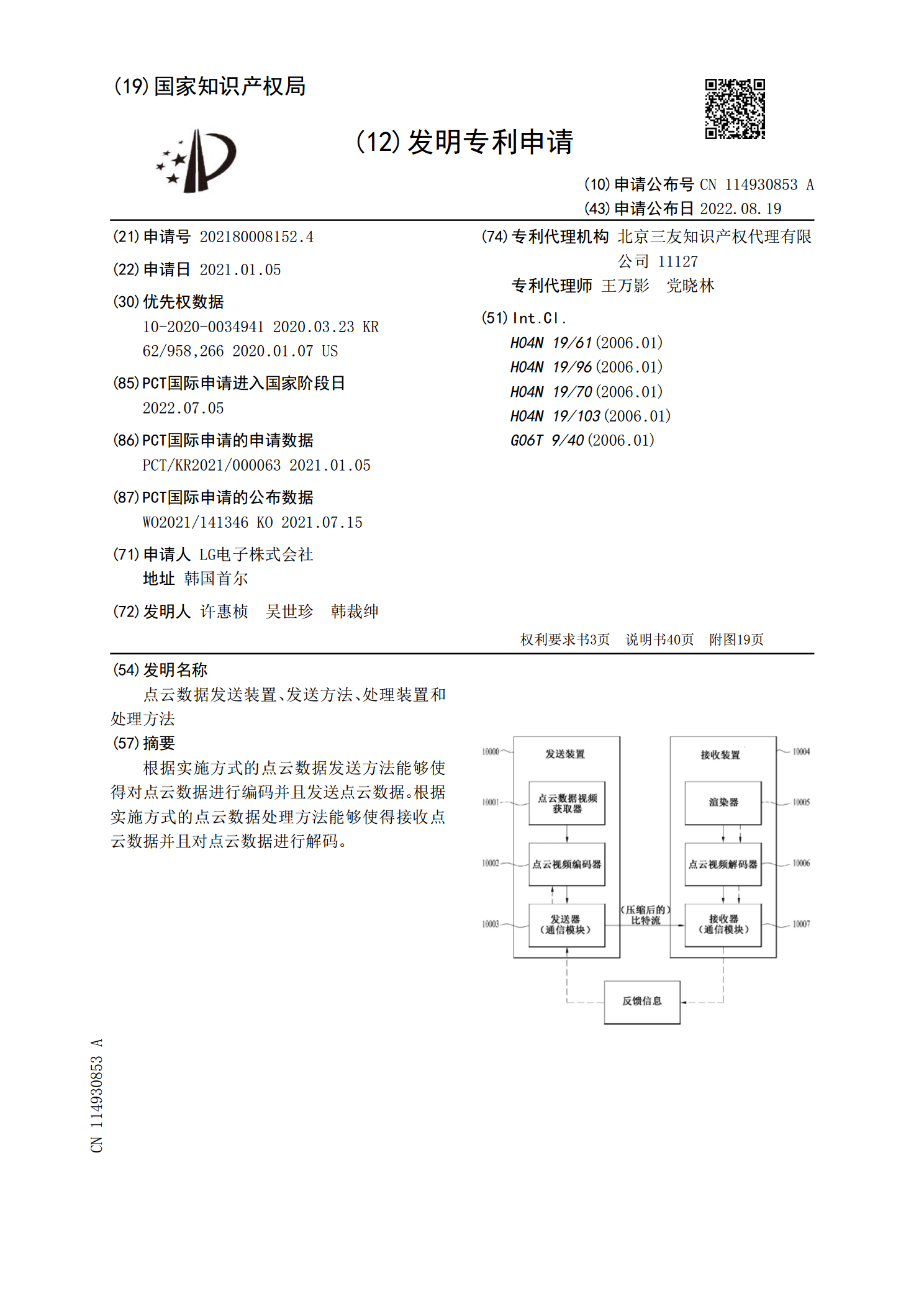
根据实施方式的点云数据发送方法能够使得对点云数据进行编码并且发送点云数据。根据实施方式的点云数据处理方法能够使得接收点云数据并且对点云数据进行解码。
一种点云数据的处理方法及装置和点云渲染方法及装置.pdf
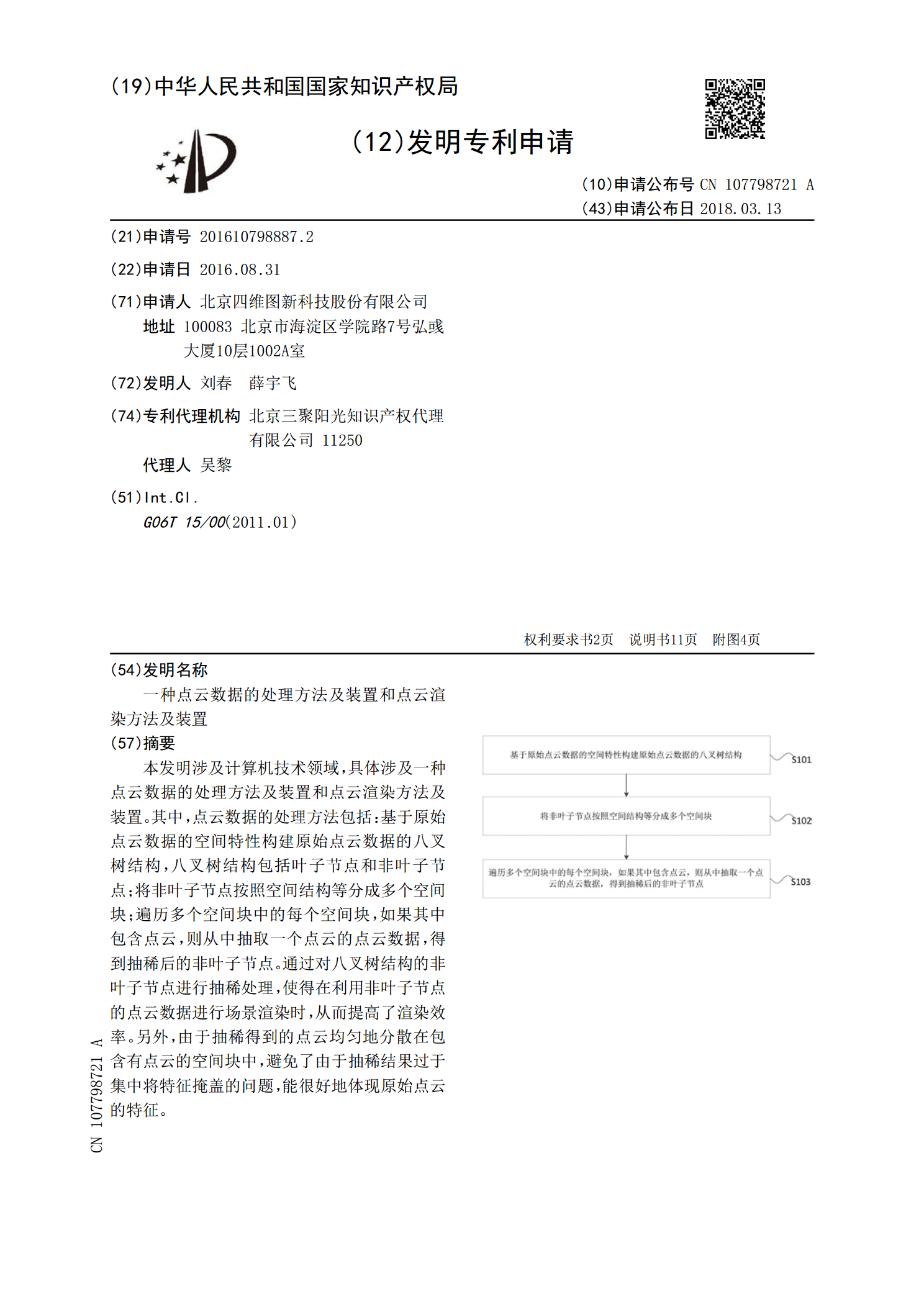
本发明涉及计算机技术领域,具体涉及一种点云数据的处理方法及装置和点云渲染方法及装置。其中,点云数据的处理方法包括:基于原始点云数据的空间特性构建原始点云数据的八叉树结构,八叉树结构包括叶子节点和非叶子节点;将非叶子节点按照空间结构等分成多个空间块;遍历多个空间块中的每个空间块,如果其中包含点云,则从中抽取一个点云的点云数据,得到抽稀后的非叶子节点。通过对八叉树结构的非叶子节点进行抽稀处理,使得在利用非叶子节点的点云数据进行场景渲染时,从而提高了渲染效率。另外,由于抽稀得到的点云均匀地分散在包含有点云的空间