
激光焊接设备校准方法.pdf

葫芦****io

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
激光焊接设备校准方法.pdf
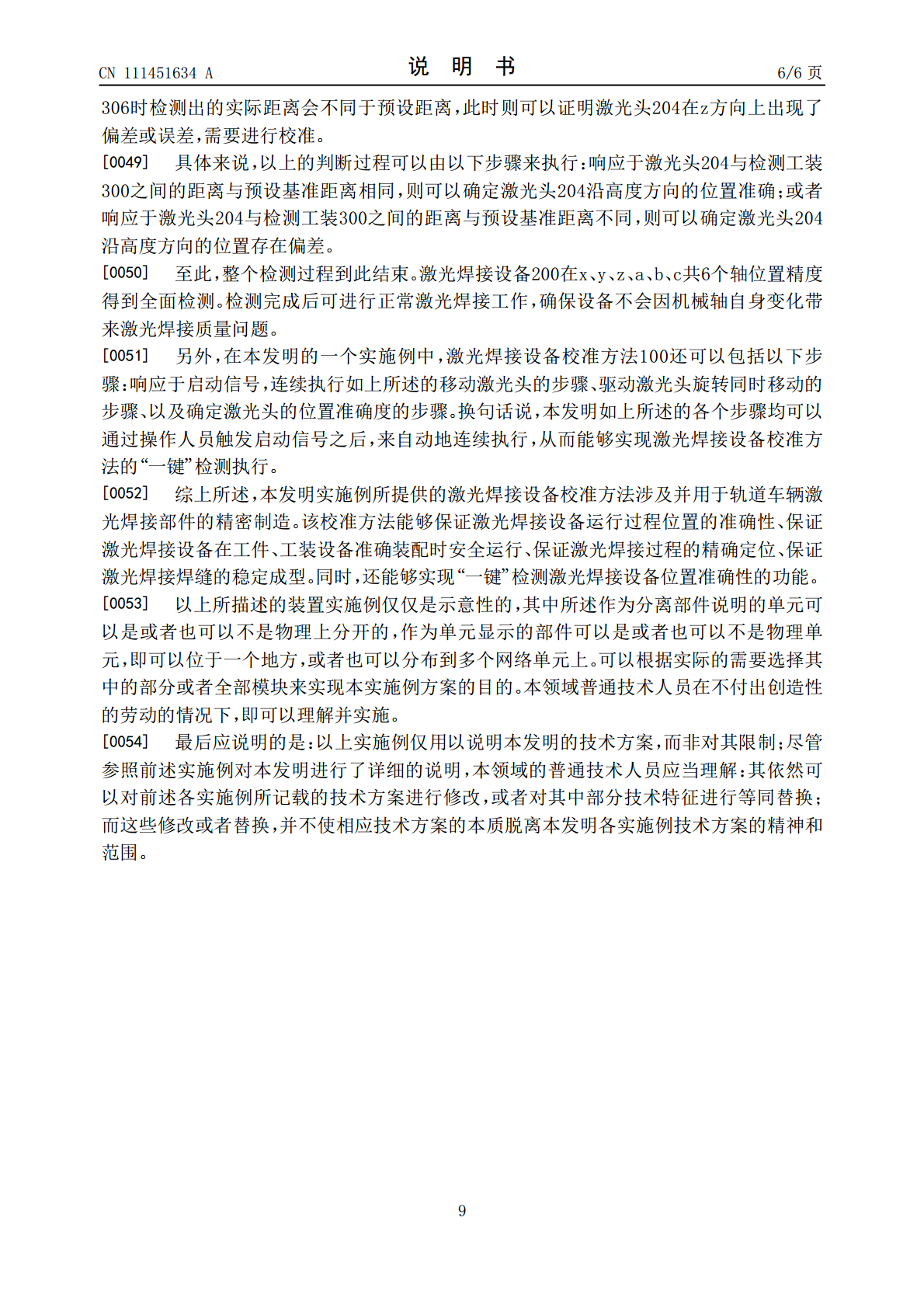
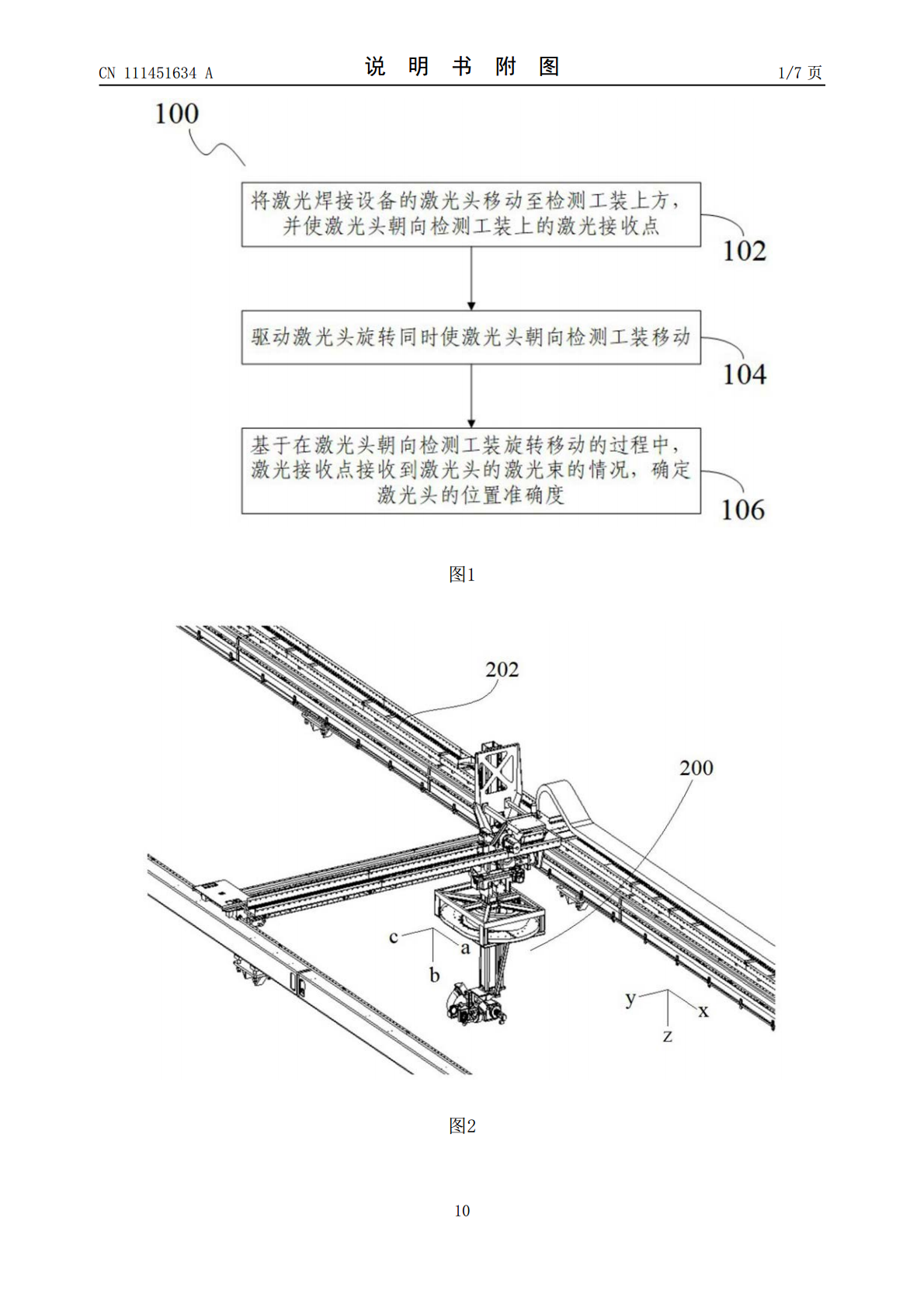
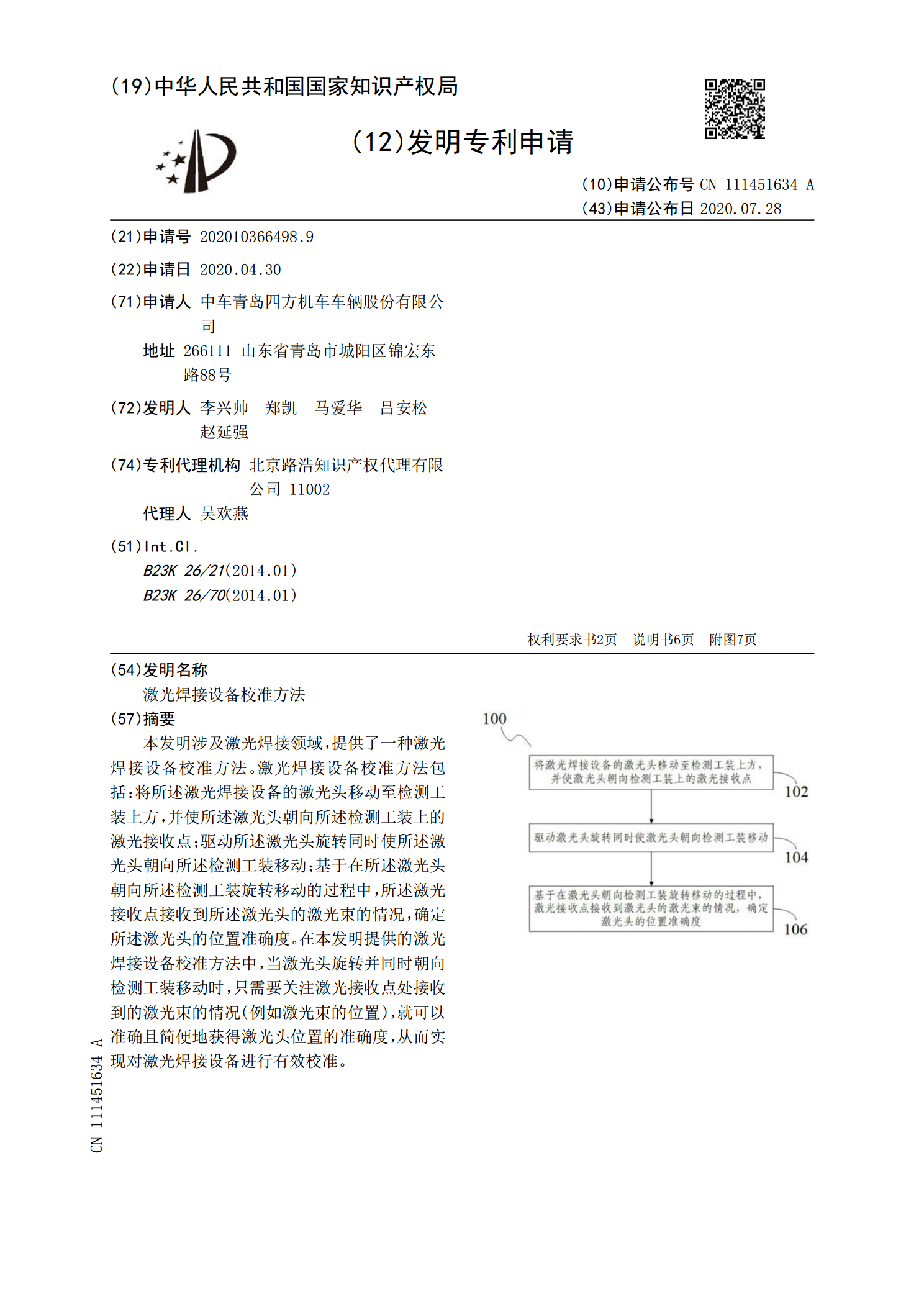
本发明涉及激光焊接领域,提供了一种激光焊接设备校准方法。激光焊接设备校准方法包括:将所述激光焊接设备的激光头移动至检测工装上方,并使所述激光头朝向所述检测工装上的激光接收点;驱动所述激光头旋转同时使所述激光头朝向所述检测工装移动;基于在所述激光头朝向所述检测工装旋转移动的过程中,所述激光接收点接收到所述激光头的激光束的情况,确定所述激光头的位置准确度。在本发明提供的激光焊接设备校准方法中,当激光头旋转并同时朝向检测工装移动时,只需要关注激光接收点处接收到的激光束的情况(例如激光束的位置),就可以准确且简便
激光雷达的校准方法及激光雷达.pdf
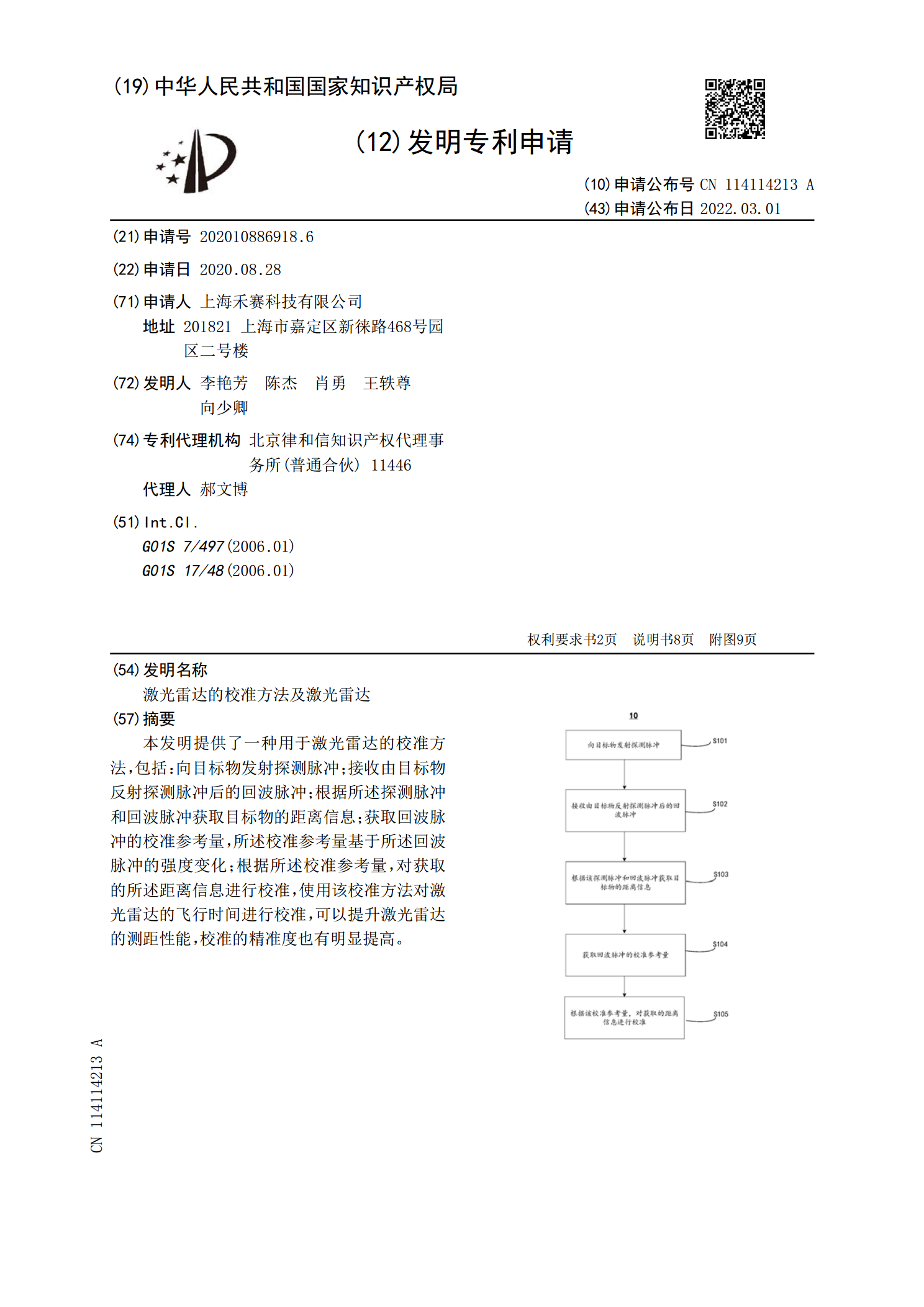
本发明提供了一种用于激光雷达的校准方法,包括:向目标物发射探测脉冲;接收由目标物反射探测脉冲后的回波脉冲;根据所述探测脉冲和回波脉冲获取目标物的距离信息;获取回波脉冲的校准参考量,所述校准参考量基于所述回波脉冲的强度变化;根据所述校准参考量,对获取的所述距离信息进行校准,使用该校准方法对激光雷达的飞行时间进行校准,可以提升激光雷达的测距性能,校准的精准度也有明显提高。
一种激光焊接设备及方法.pdf
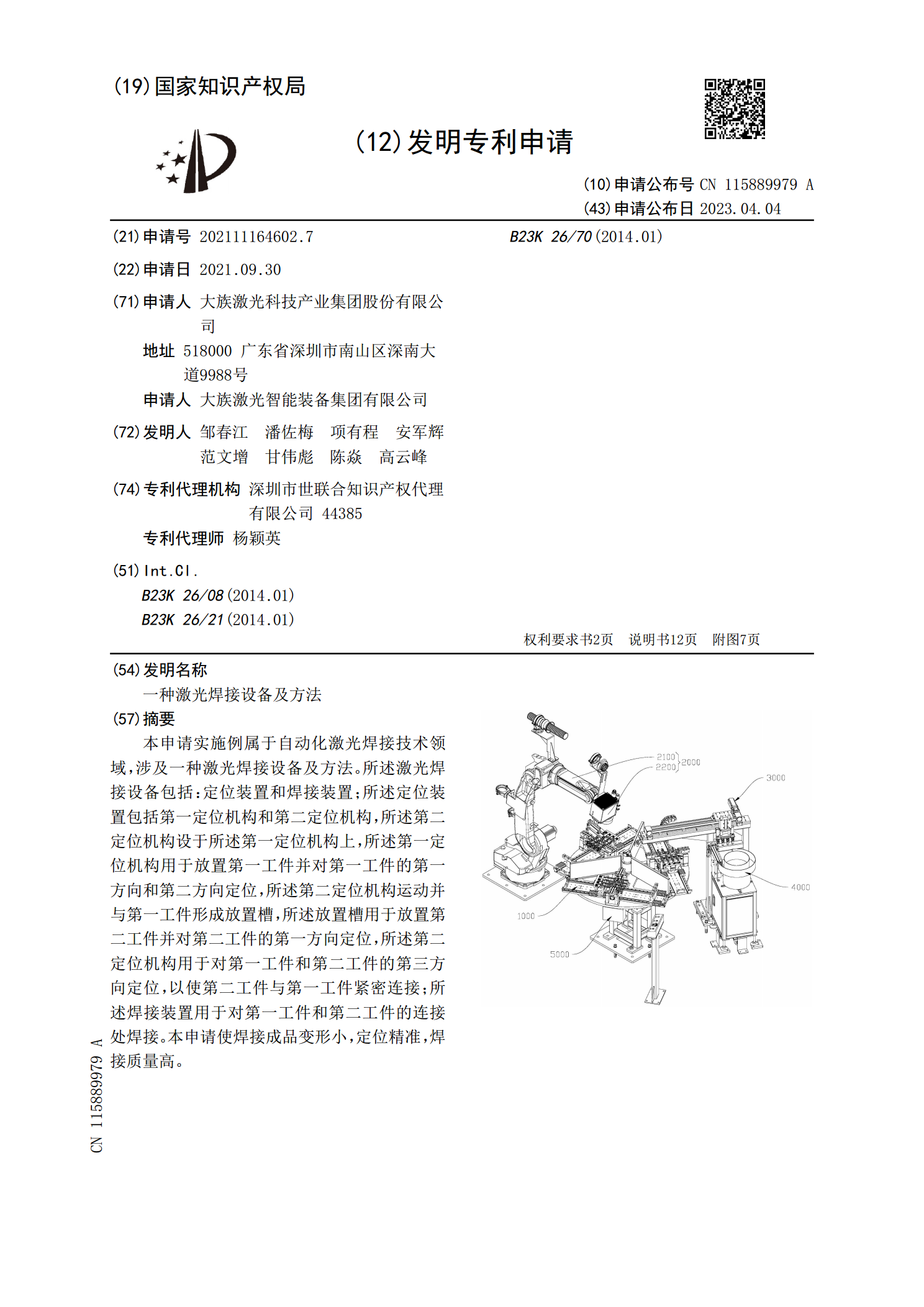
本申请实施例属于自动化激光焊接技术领域,涉及一种激光焊接设备及方法。所述激光焊接设备包括:定位装置和焊接装置;所述定位装置包括第一定位机构和第二定位机构,所述第二定位机构设于所述第一定位机构上,所述第一定位机构用于放置第一工件并对第一工件的第一方向和第二方向定位,所述第二定位机构运动并与第一工件形成放置槽,所述放置槽用于放置第二工件并对第二工件的第一方向定位,所述第二定位机构用于对第一工件和第二工件的第三方向定位,以使第二工件与第一工件紧密连接;所述焊接装置用于对第一工件和第二工件的连接处焊接。本申请使焊
激光功率的校准方法和装置.pdf
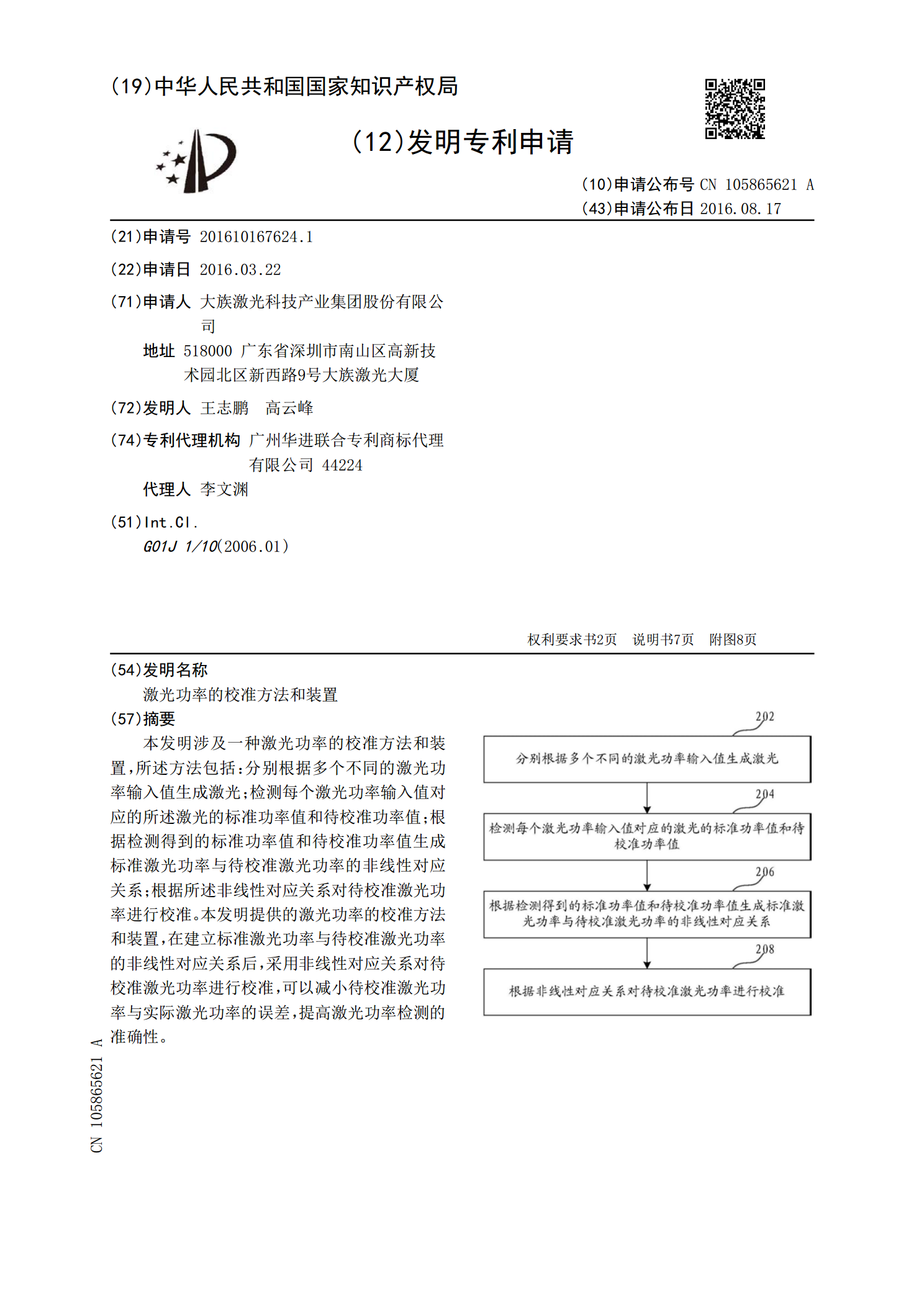
本发明涉及一种激光功率的校准方法和装置,所述方法包括:分别根据多个不同的激光功率输入值生成激光;检测每个激光功率输入值对应的所述激光的标准功率值和待校准功率值;根据检测得到的标准功率值和待校准功率值生成标准激光功率与待校准激光功率的非线性对应关系;根据所述非线性对应关系对待校准激光功率进行校准。本发明提供的激光功率的校准方法和装置,在建立标准激光功率与待校准激光功率的非线性对应关系后,采用非线性对应关系对待校准激光功率进行校准,可以减小待校准激光功率与实际激光功率的误差,提高激光功率检测的准确性。
基于激光位移传感器的天平校准装置及校准方法.pdf
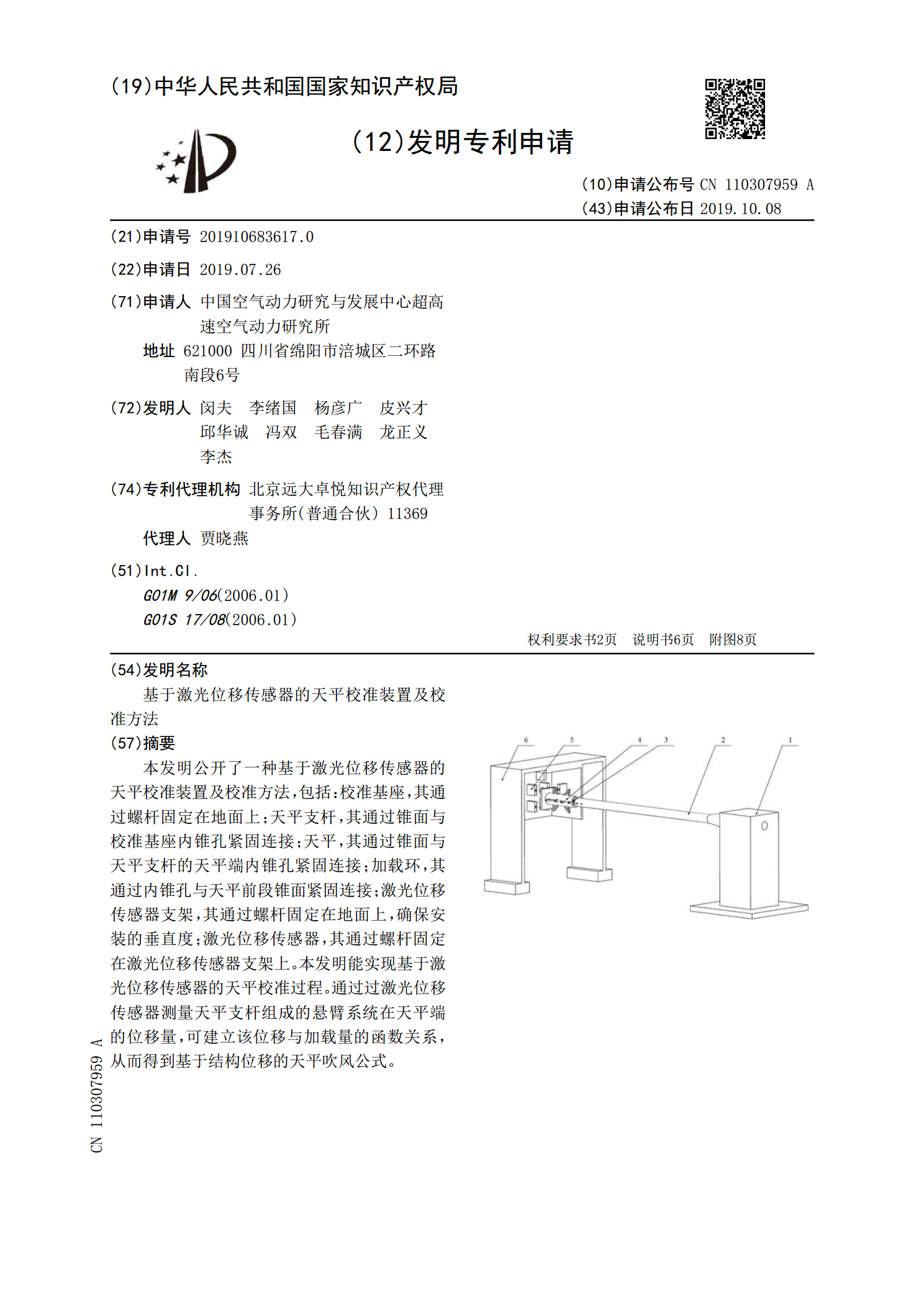
本发明公开了一种基于激光位移传感器的天平校准装置及校准方法,包括:校准基座,其通过螺杆固定在地面上;天平支杆,其通过锥面与校准基座内锥孔紧固连接;天平,其通过锥面与天平支杆的天平端内锥孔紧固连接;加载环,其通过内锥孔与天平前段锥面紧固连接;激光位移传感器支架,其通过螺杆固定在地面上,确保安装的垂直度;激光位移传感器,其通过螺杆固定在激光位移传感器支架上。本发明能实现基于激光位移传感器的天平校准过程。通过过激光位移传感器测量天平支杆组成的悬臂系统在天平端的位移量,可建立该位移与加载量的函数关系,从而得到基于