
利用可驾驶区域检测来导航的方法和系统以及存储介质.pdf

和裕****az


1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共31页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
利用可驾驶区域检测来导航的方法和系统以及存储介质.pdf
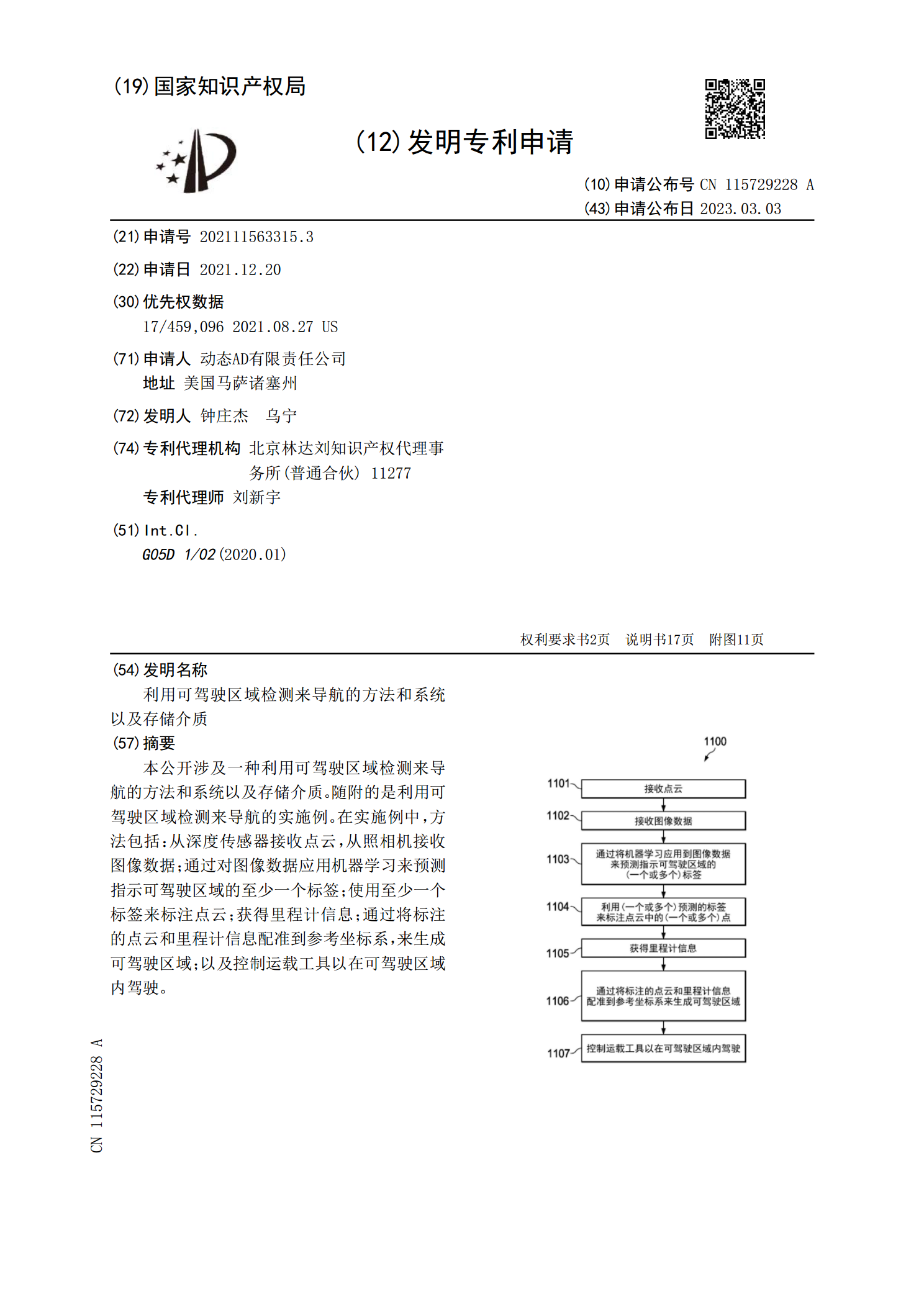
本公开涉及一种利用可驾驶区域检测来导航的方法和系统以及存储介质。随附的是利用可驾驶区域检测来导航的实施例。在实施例中,方法包括:从深度传感器接收点云,从照相机接收图像数据;通过对图像数据应用机器学习来预测指示可驾驶区域的至少一个标签;使用至少一个标签来标注点云;获得里程计信息;通过将标注的点云和里程计信息配准到参考坐标系,来生成可驾驶区域;以及控制运载工具以在可驾驶区域内驾驶。
室内导航方法、系统以及可读存储介质.pdf
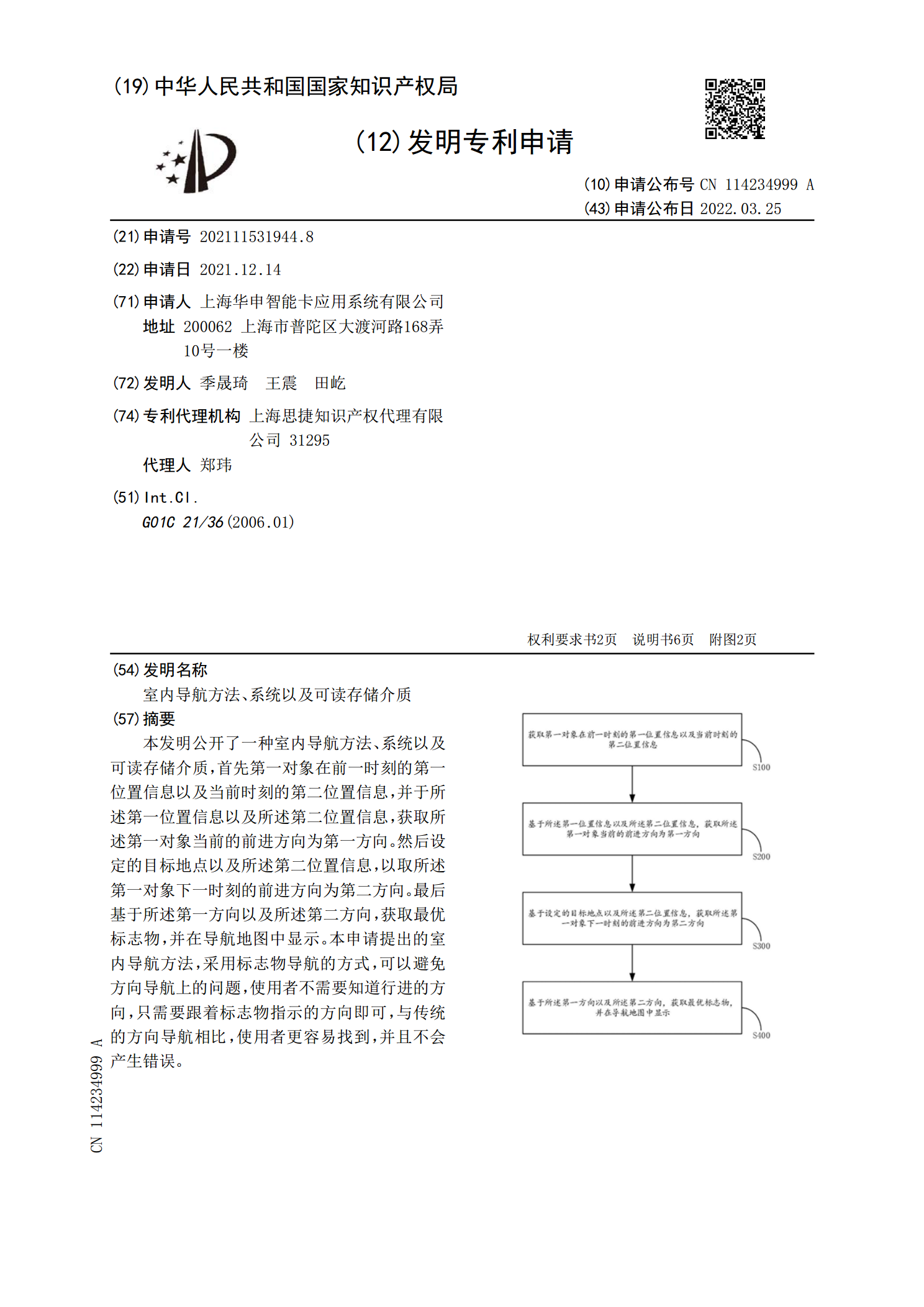
本发明公开了一种室内导航方法、系统以及可读存储介质,首先第一对象在前一时刻的第一位置信息以及当前时刻的第二位置信息,并于所述第一位置信息以及所述第二位置信息,获取所述第一对象当前的前进方向为第一方向。然后设定的目标地点以及所述第二位置信息,以取所述第一对象下一时刻的前进方向为第二方向。最后基于所述第一方向以及所述第二方向,获取最优标志物,并在导航地图中显示。本申请提出的室内导航方法,采用标志物导航的方式,可以避免方向导航上的问题,使用者不需要知道行进的方向,只需要跟着标志物指示的方向即可,与传统的方向导航
导航方法、装置、存储介质及高级驾驶辅助系统.pdf
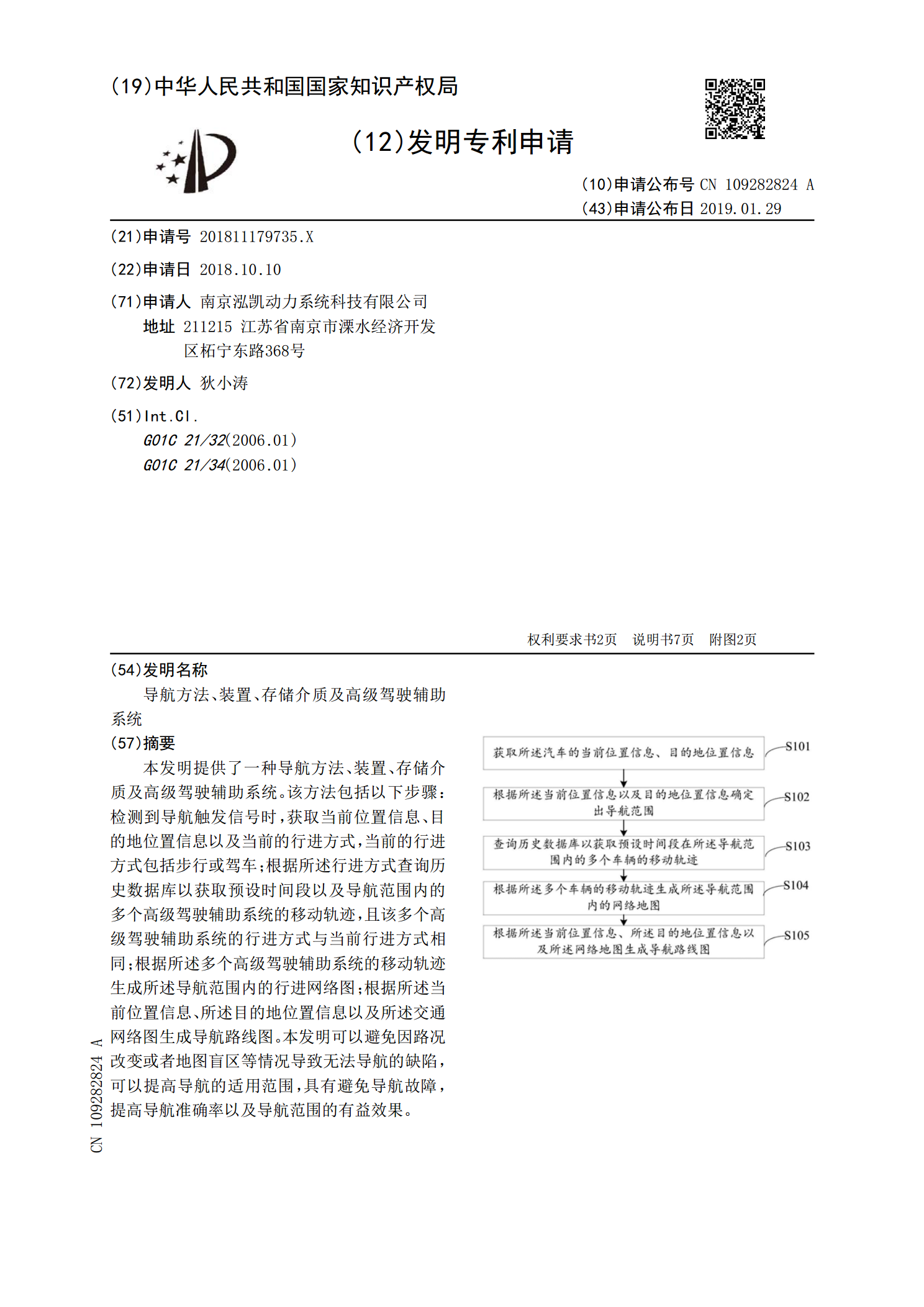
本发明提供了一种导航方法、装置、存储介质及高级驾驶辅助系统。该方法包括以下步骤:检测到导航触发信号时,获取当前位置信息、目的地位置信息以及当前的行进方式,当前的行进方式包括步行或驾车;根据所述行进方式查询历史数据库以获取预设时间段以及导航范围内的多个高级驾驶辅助系统的移动轨迹,且该多个高级驾驶辅助系统的行进方式与当前行进方式相同;根据所述多个高级驾驶辅助系统的移动轨迹生成所述导航范围内的行进网络图;根据所述当前位置信息、所述目的地位置信息以及所述交通网络图生成导航路线图。本发明可以避免因路况改变或者地图盲
检测赌博APP的方法和系统以及存储介质.pdf
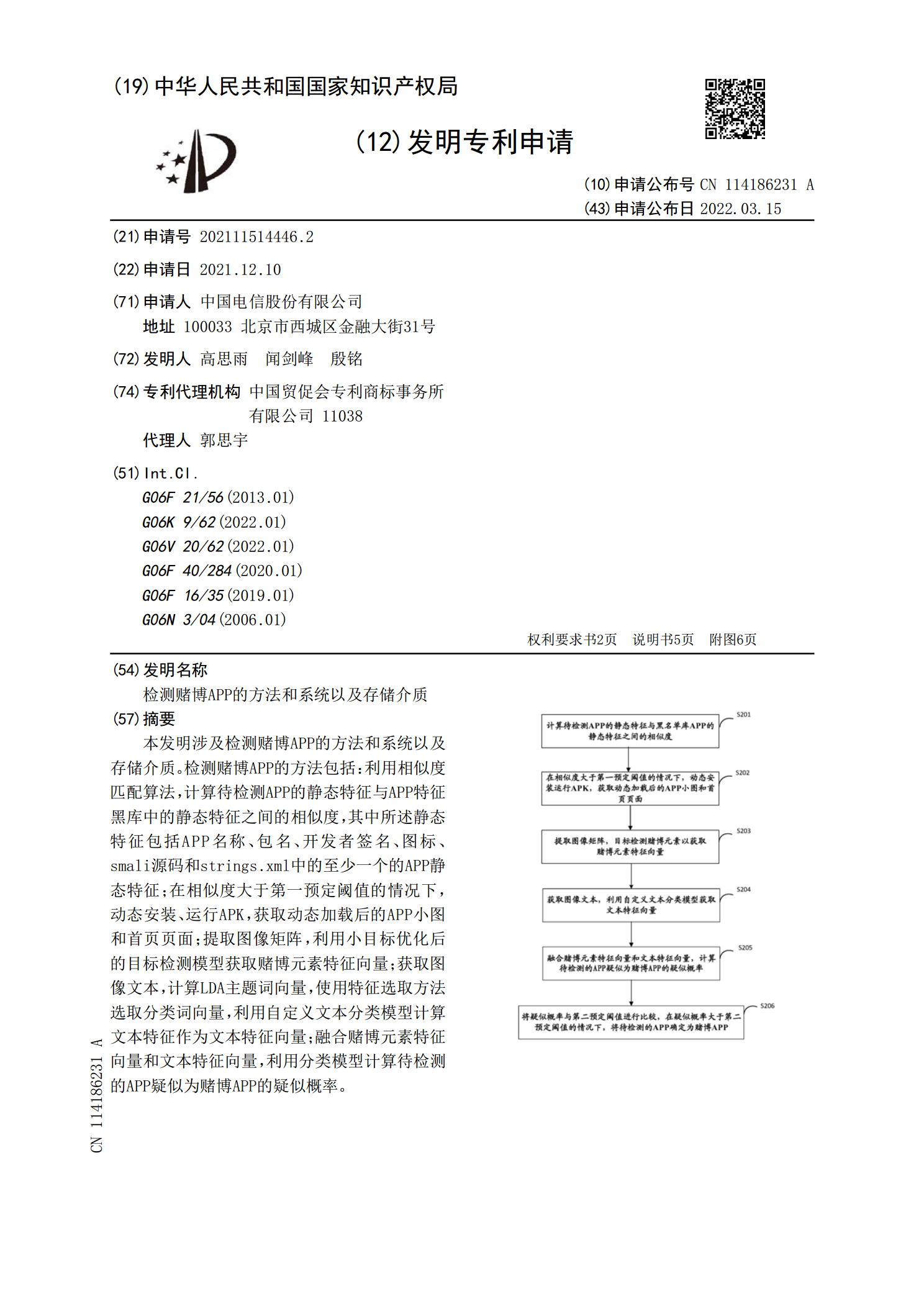
本发明涉及检测赌博APP的方法和系统以及存储介质。检测赌博APP的方法包括:利用相似度匹配算法,计算待检测APP的静态特征与APP特征黑库中的静态特征之间的相似度,其中所述静态特征包括APP名称、包名、开发者签名、图标、smali源码和strings.xml中的至少一个的APP静态特征;在相似度大于第一预定阈值的情况下,动态安装、运行APK,获取动态加载后的APP小图和首页页面;提取图像矩阵,利用小目标优化后的目标检测模型获取赌博元素特征向量;获取图像文本,计算LDA主题词向量,使用特征选取方法选取分类词
基于动态等待区域的导航方法、系统、设备及存储介质.pdf
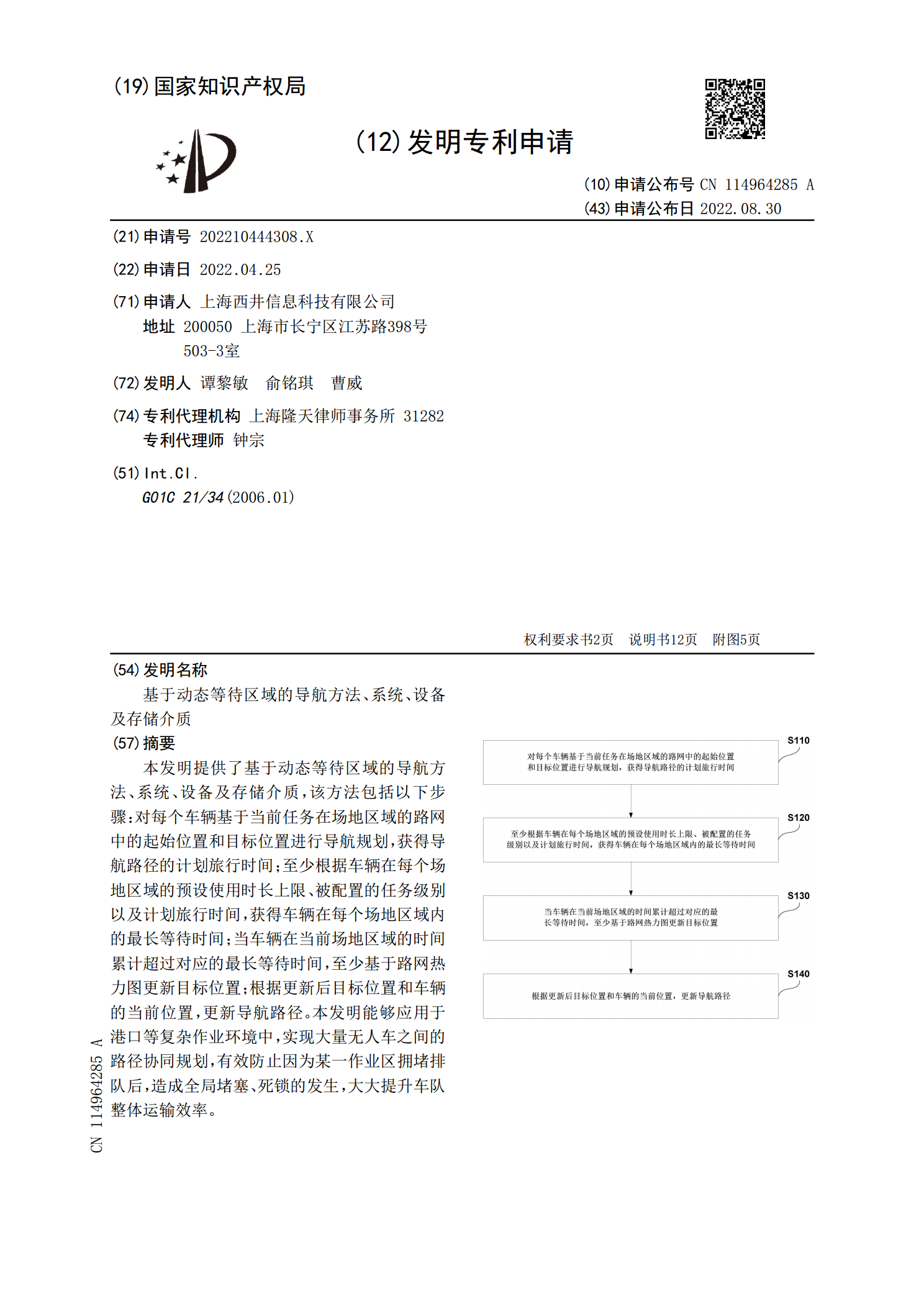
本发明提供了基于动态等待区域的导航方法、系统、设备及存储介质,该方法包括以下步骤:对每个车辆基于当前任务在场地区域的路网中的起始位置和目标位置进行导航规划,获得导航路径的计划旅行时间;至少根据车辆在每个场地区域的预设使用时长上限、被配置的任务级别以及计划旅行时间,获得车辆在每个场地区域内的最长等待时间;当车辆在当前场地区域的时间累计超过对应的最长等待时间,至少基于路网热力图更新目标位置;根据更新后目标位置和车辆的当前位置,更新导航路径。本发明能够应用于港口等复杂作业环境中,实现大量无人车之间的路径协同规划