
用于操作液压缸的改进装置和方法.pdf

是你****晨呀


1/10
2/10
3/10

4/10

5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于操作液压缸的改进装置和方法.pdf
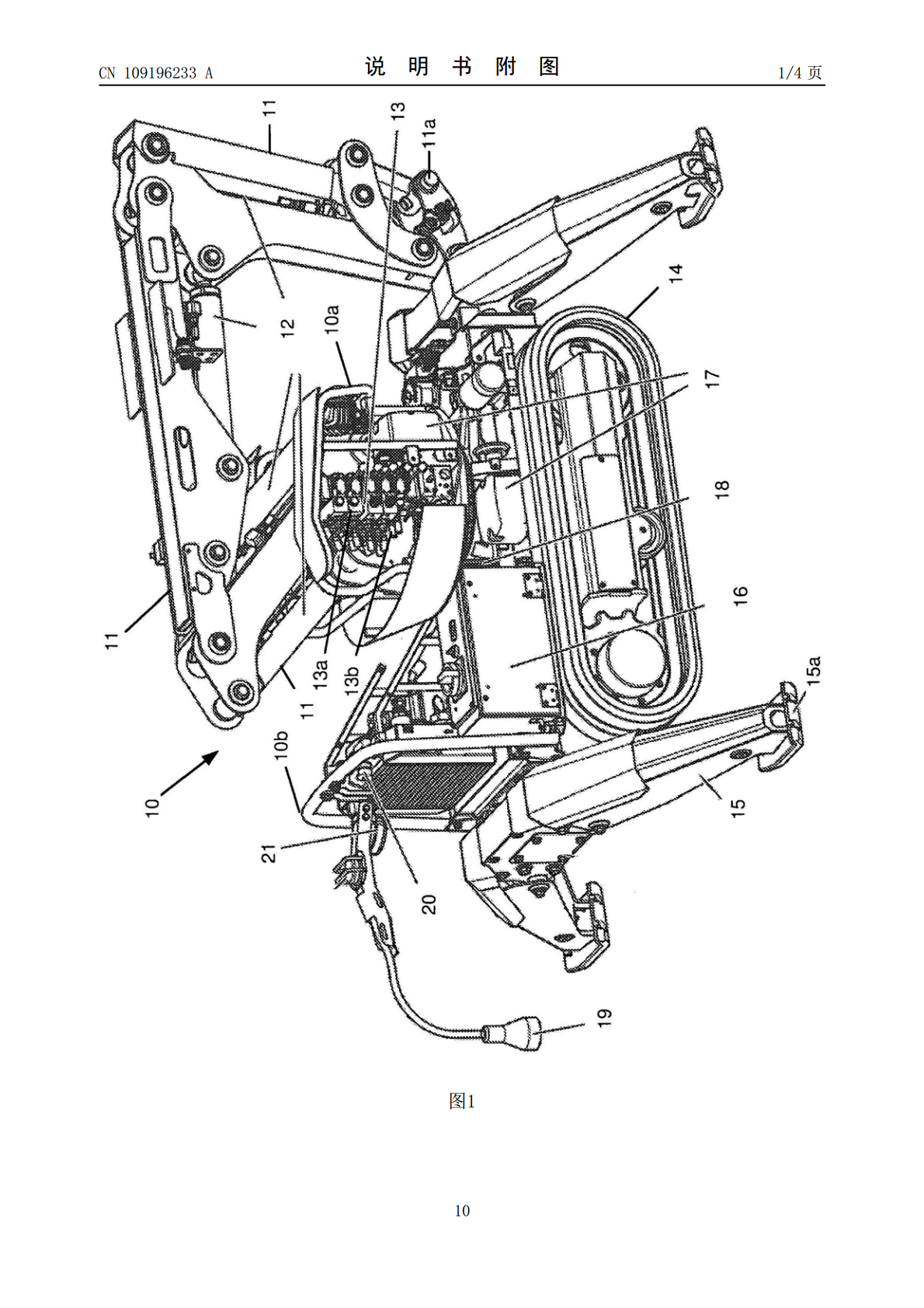
本发明涉及一种运载工具,包括具有活塞的液压缸、控制器和活塞位置传感器,其中运载工具设置成通过使用液压缸来运载附件,并且其中控制器构造成:接收活塞位置信息;确定活塞的移动方向;以及如果活塞位置等于在移动方向上的离液压缸的端壁的止动距离,则中止移动。

功率装置和用于改进的方法.pdf
本发明涉及功率装置和用于改进的方法。一种功率装置(1)包括第一燃气涡轮发动机(2)、第二燃气涡轮发动机(3)、烟道气管道(4)、用于处理来自第二燃气涡轮发动机(3)的烟道气的CO2捕集系统(5),以及排气系统(6)。此外,其包括下者的至少一个:在第一燃气涡轮发动机(2)和排气系统(6)之间的直接连接件(9)以及用于在线调节通过其中的烟道气流的闸阀(10);在第一燃气涡轮发动机(2)和CO2捕集系统(5)之间的直接连接件(13)以及用于调节通过其中的烟道气流的闸阀(14);用于第二燃气涡轮发动机(3)的含鲜

用于改进叶片生产的方法和装置.pdf
本发明涉及用于改进叶片生产的方法和装置,优选涉及用于改进风力涡轮机叶片生产的方法和装置。第一容器(1)包含树脂。所述第一容器(1)与除气系统(5)连接,因而树脂被提供到所述除气系统(3)。该除气系统(3)被构造和设计成使得提供的树脂内的气体量被减少。因而,生产气体减少的树脂,其能与混合物混合。树脂硬化剂混合物适合注入到封闭的复合结构(8)中,该封闭的复合结构用于生产所述叶片(8)。

用于改进熔化过程的方法和装置.pdf
本发明涉及用于使得结构部件/炉衬推动穿过/推动进入/转动穿过/转动进入的一种方法和一种装置,该结构部件/炉衬作为用于炉料输入段/熔炉/熔液的输送段/其它的排出物的输送段/熔液的运输装置的单个结构部件/区段/组件,其中,借助于推动穿过部件/推动进入部件/转动穿过-转动进入部件和相应的驱动装置实现对推动穿过/推动进入/转动穿过/转动进入的调节或完全自动化地实现这种调节,优选地在考虑单个结构部件/区段/组件的、各自的可推动穿过的/可推动进入的/可转动穿过的/可转动进入的结构部件/炉衬的最大允许的压力和拉力的情况

用于装配和拆卸液压缸的装置.pdf
本发明涉及一种用于装配和拆卸液压缸的装置,所述装置由台座形状的机架构成,所述机架具有水平布置的导向装置,其可滑动地支承液压缸缸套的基座、用于支柱的至少一个基座和用于工具的基座,此外还具有用于固定液压缸的活塞杆的定位器。根据本发明,用于固定活塞杆的定位器具有由定心轴所驱动的定心滑架,该定心滑架具有活塞杆底座,其中定位器被设计成可绕机架的纵轴转动并且该旋转运动通过扭矩控制的电动驱动机构来实现。