
一种无人驾驶的溢油自动回收系统及其工作方法.pdf

是你****噩呀

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种无人驾驶的溢油自动回收系统及其工作方法.pdf
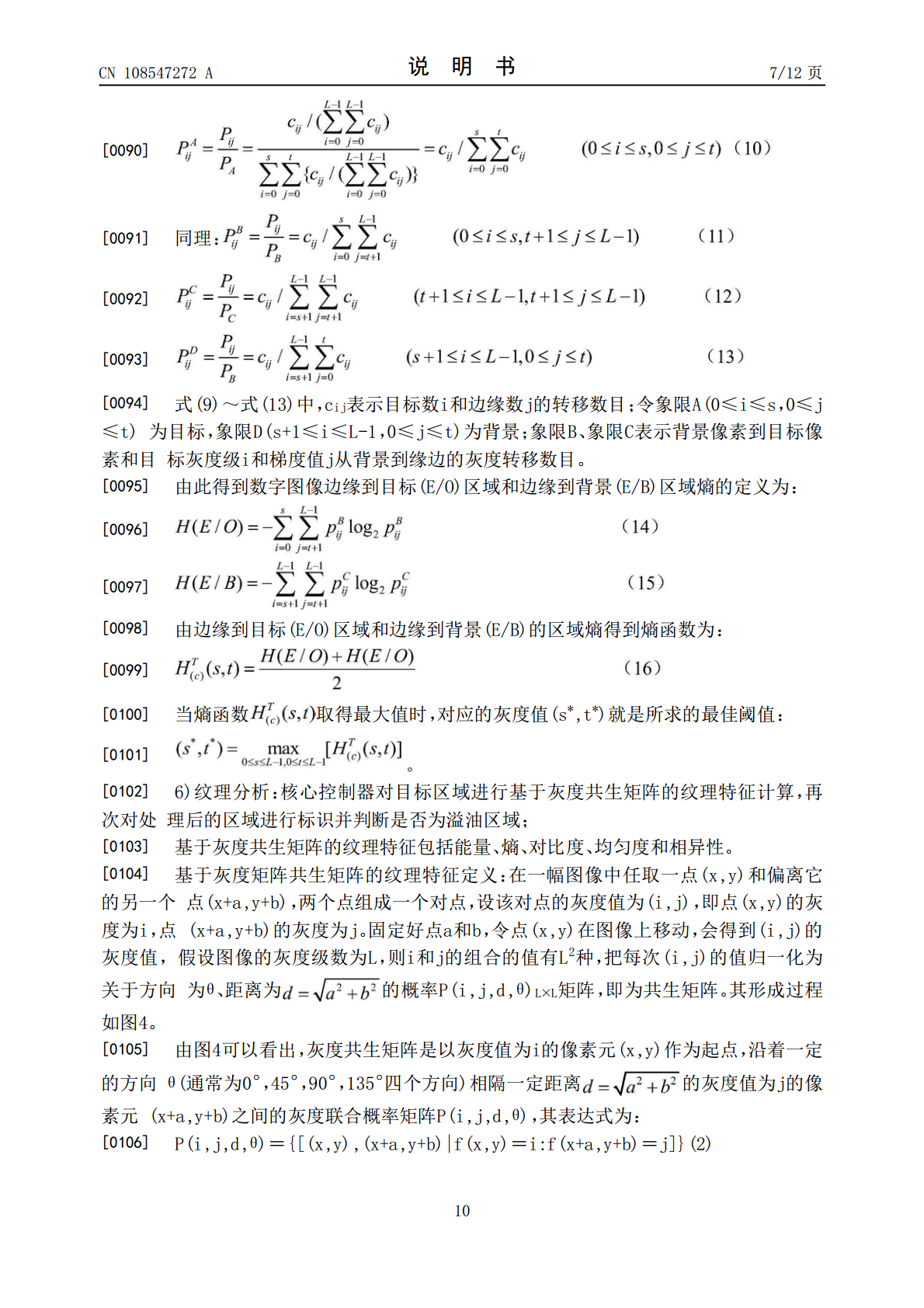
一种无人驾驶的溢油自动回收系统及其工作方法。涉及环境监测、应急和预警技术领域,具体涉及一种无人驾驶的溢油自动回收系统及其工作方法。将溢油自动监测系统与溢油回收装置有机结合。包括无人驾驶牵引船、收油船和智能控制终端,所述牵引船与收油船通过牵引绳连接,所述牵引船上设有摄像机和核心控制器,所述摄像机与核心控制器通过无线连接,所述智能控制终端与核心控制器通过无线连接。与现有技术相比,本发明利用图像识别、路径规划和自动驾驶技术,使得溢油回收效率提高30%以上;无人参与的自动溢油回收方式,减小了人工劳动强度,减小了回
蚁群式动态溢油回收无人艇系统及其溢油回收方法.pdf
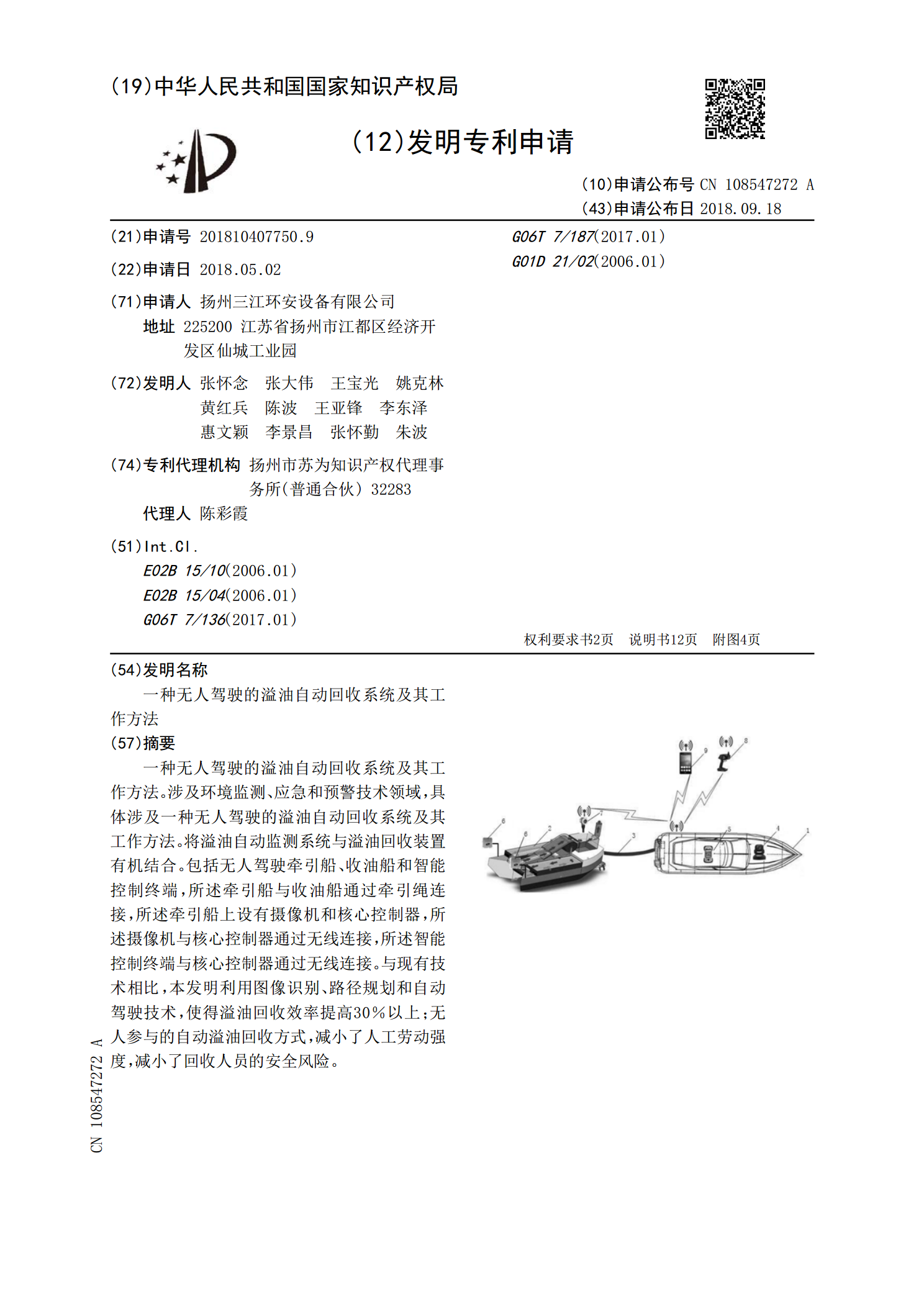
本发明公开了一种蚁群式动态溢油回收无人艇系统,包括子母船和多个无人艇组。子母船上设置有无人艇调控系统、无人艇升降平台、溢油监测系统等。各无人艇组分别由一艘主艇和多艘从艇组成,主艇和从艇上分别设置有航迹规划系统、无线通信装置、溢油回收装置和储油装置,主艇上还设置有溢油监测装置和导航定位装置等。本发明还公开了一种蚁群式动态溢油回收方法,包括如下步骤:1)前往溢油区域;2)对溢油区域进行分区;3)按分区对无人艇进行分组并分配任务;4)各无人艇组前往任务区;5)各无人艇组对溢油进行回收;6)主从艇协同收油直至完成

溢油回收系统.pdf
本申请涉及一种溢油回收系统,包括:船体;回收装置;回收装置包括回油机、围油机构及张开机构,围油机构包括两个围油栏;两个围油栏的一端均与回油机相连,另一端与所述船体相连;所述回收装置所包括的至少一个围油栏远离所述回油机的一端设有张开机构;围油机构具有不可围油至回油机的非围油状态及能够围油至回油机的围油状态;在非围油状态,两个围油栏相互靠近收拢;在围油状态时,两个围油栏相互张开呈开口向前的U字型;张开机构能够在水流作用下使得围油机构从非围油状态切换至围油状态。张开机构能够在水流作用下使得围油机构从非围油状态切
一种快速水面溢油回收系统.pdf
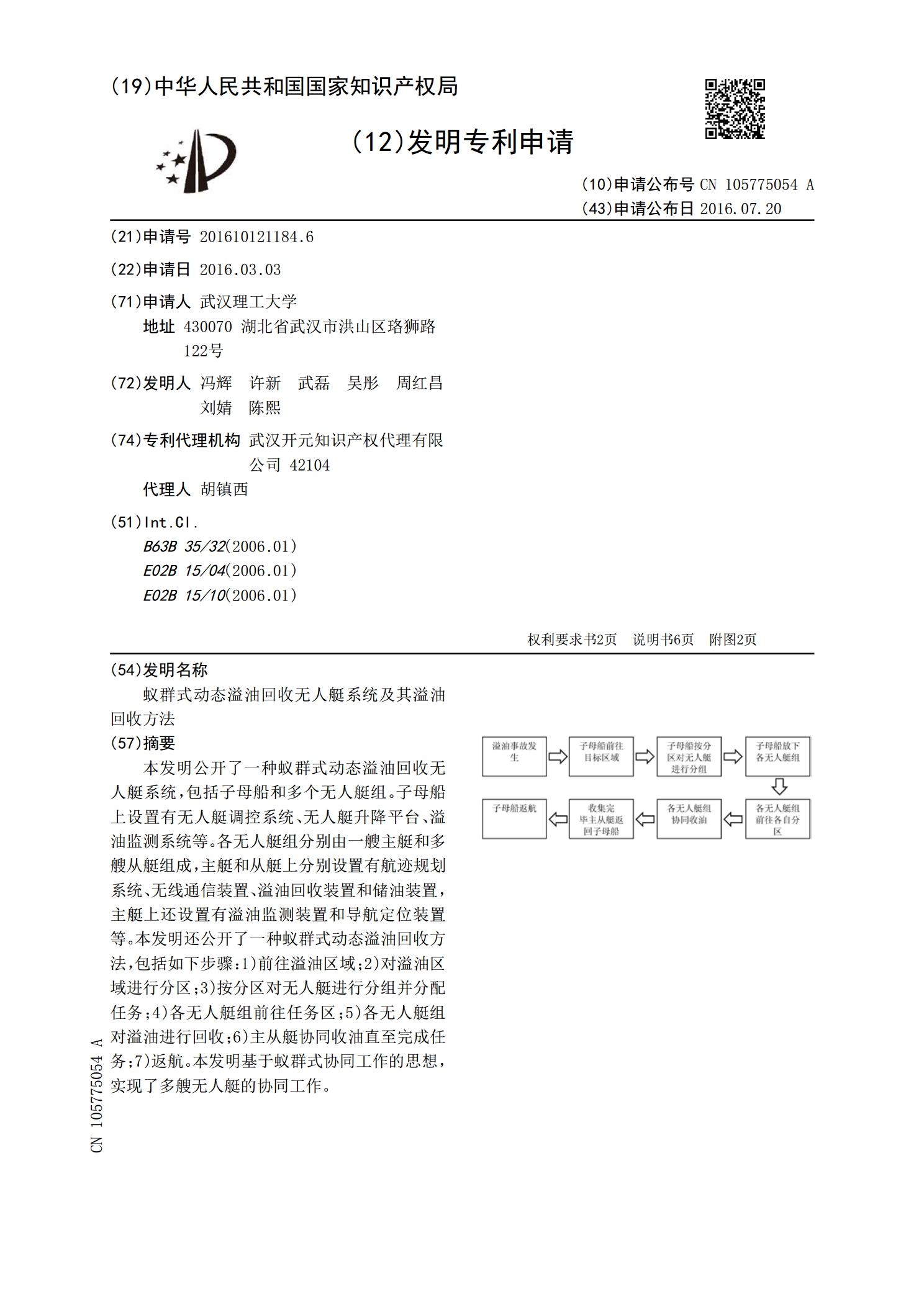
本发明涉及一种快速水面溢油回收系统,包括自适应收油装置、自吸式排油泵和油水分离器,自适应收油装置通过排油固定管和排油管与自吸式排油泵连接,自吸式排油泵出口通过出液管与油水分离器进液管连接。本快速水面溢油回收系统适应性强、便携性高、收油效率高、应急反应快,可以最大限度地降低经济损失和减少环境污染。
一种粉细砂回收系统及其工作方法.pdf
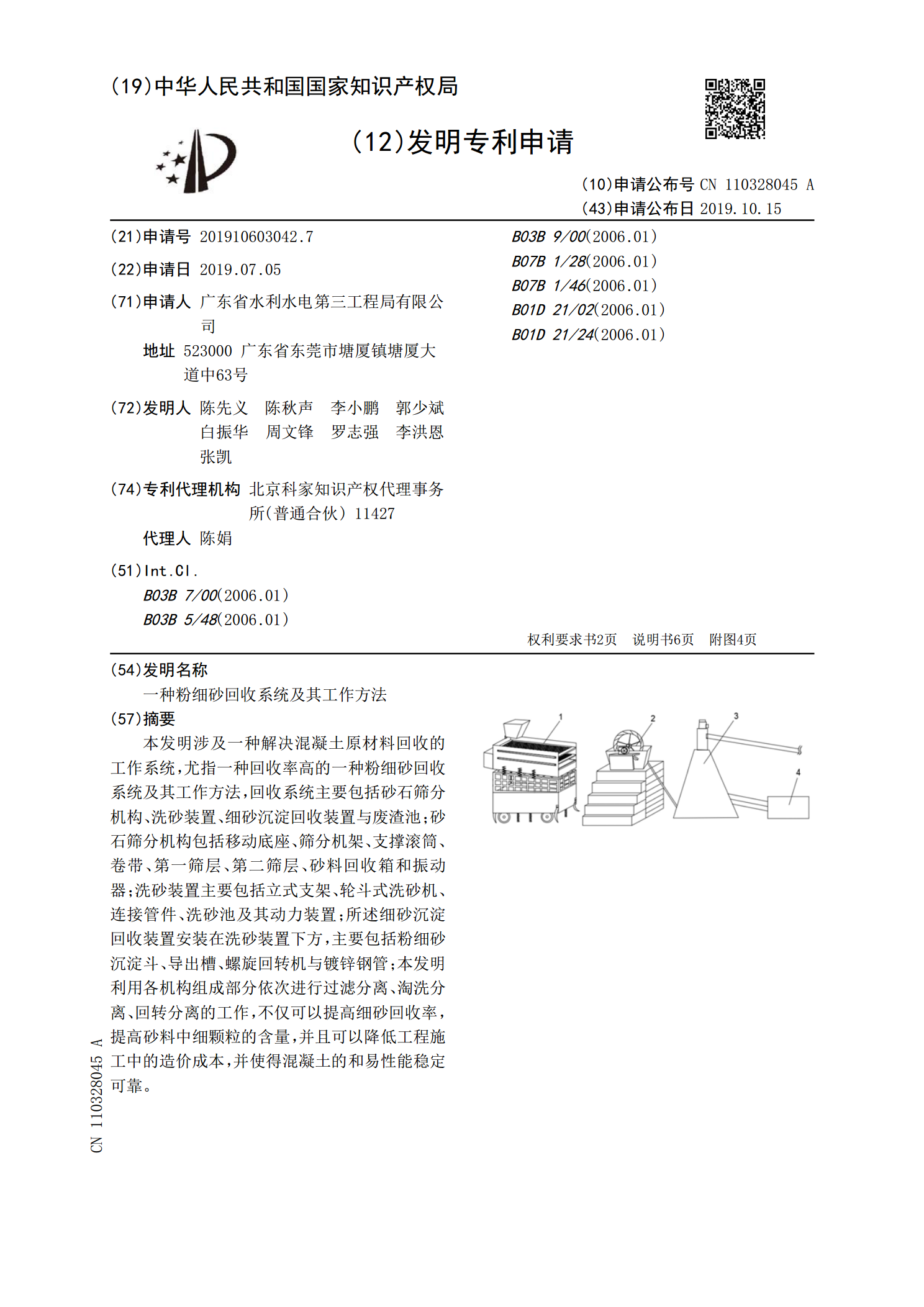
本发明涉及一种解决混凝土原材料回收的工作系统,尤指一种回收率高的一种粉细砂回收系统及其工作方法,回收系统主要包括砂石筛分机构、洗砂装置、细砂沉淀回收装置与废渣池;砂石筛分机构包括移动底座、筛分机架、支撑滚筒、卷带、第一筛层、第二筛层、砂料回收箱和振动器;洗砂装置主要包括立式支架、轮斗式洗砂机、连接管件、洗砂池及其动力装置;所述细砂沉淀回收装置安装在洗砂装置下方,主要包括粉细砂沉淀斗、导出槽、螺旋回转机与镀锌钢管;本发明利用各机构组成部分依次进行过滤分离、淘洗分离、回转分离的工作,不仅可以提高细砂回收率,提