
基于遗传算法的机械臂轨迹规划方法、系统、介质和设备.pdf

瀚玥****魔王


1/10
2/10
3/10
4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于遗传算法的机械臂轨迹规划方法、系统、介质和设备.pdf
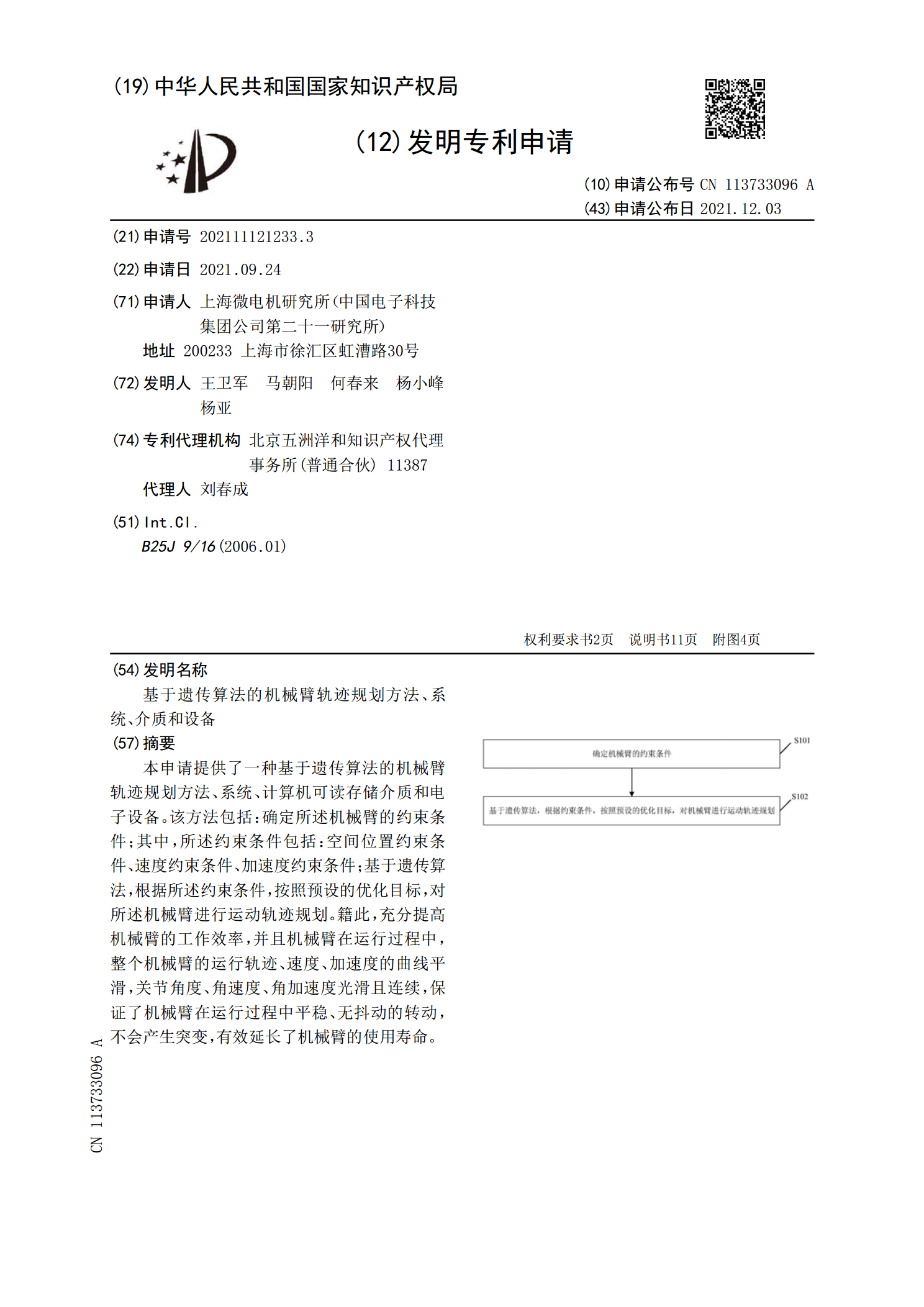
本申请提供了一种基于遗传算法的机械臂轨迹规划方法、系统、计算机可读存储介质和电子设备。该方法包括:确定所述机械臂的约束条件;其中,所述约束条件包括:空间位置约束条件、速度约束条件、加速度约束条件;基于遗传算法,根据所述约束条件,按照预设的优化目标,对所述机械臂进行运动轨迹规划。籍此,充分提高机械臂的工作效率,并且机械臂在运行过程中,整个机械臂的运行轨迹、速度、加速度的曲线平滑,关节角度、角速度、角加速度光滑且连续,保证了机械臂在运行过程中平稳、无抖动的转动,不会产生突变,有效延长了机械臂的使用寿命。

基于改进遗传算法的机械臂时间最优轨迹规划.docx
基于改进遗传算法的机械臂时间最优轨迹规划标题:基于改进遗传算法的机械臂时间最优轨迹规划摘要:机械臂在工业自动化领域中广泛应用,其中时间最优轨迹规划是一个重要的课题。本文针对机械臂时间最优轨迹规划问题,提出了一种基于改进遗传算法的方法。首先,分析了机械臂时间最优轨迹规划的背景和意义;其次,介绍了传统遗传算法的基本原理及其在时间最优轨迹规划中的应用;然后,对传统遗传算法进行改进,包括优化初始种群、改变交叉和变异操作、引入多种群策略等;最后,通过数值实验验证了改进遗传算法在机械臂时间最优轨迹规划中的优越性,并对

基于量子遗传算法的时间最优机械臂轨迹规划研究.docx
基于量子遗传算法的时间最优机械臂轨迹规划研究基于量子遗传算法的时间最优机械臂轨迹规划研究摘要:机械臂轨迹规划是实现机械臂灵活准确运动的关键技术之一。本文基于量子遗传算法提出了一种时间最优的机械臂轨迹规划方法。通过量子遗传算法结合机械臂动力学模型,实现了机械臂在给定任务约束下的时间最优轨迹规划。仿真实验结果表明,该方法能够有效提高机械臂的运动效率和准确性。关键词:量子遗传算法;机械臂轨迹规划;时间最优1.引言机械臂作为一种自动化控制设备,广泛应用于工业生产和科研领域。机械臂的运动规划对于提高工作效率和保证运
一种机械臂的轨迹规划方法、装置、设备及可读存储介质.pdf
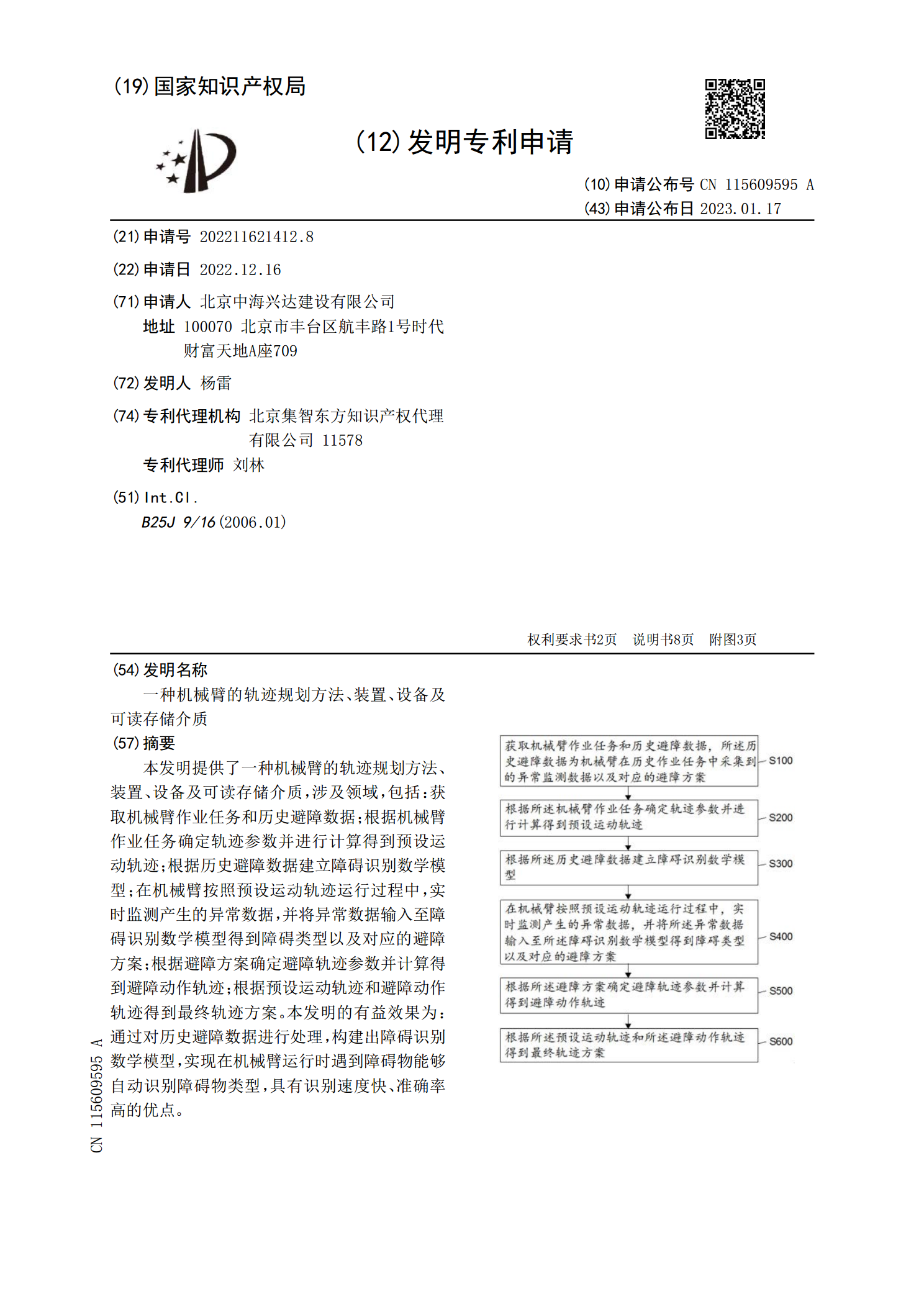
本发明提供了一种机械臂的轨迹规划方法、装置、设备及可读存储介质,涉及领域,包括:获取机械臂作业任务和历史避障数据;根据机械臂作业任务确定轨迹参数并进行计算得到预设运动轨迹;根据历史避障数据建立障碍识别数学模型;在机械臂按照预设运动轨迹运行过程中,实时监测产生的异常数据,并将异常数据输入至障碍识别数学模型得到障碍类型以及对应的避障方案;根据避障方案确定避障轨迹参数并计算得到避障动作轨迹;根据预设运动轨迹和避障动作轨迹得到最终轨迹方案。本发明的有益效果为:通过对历史避障数据进行处理,构建出障碍识别数学模型,实

基于遗传算法的机械臂时间最优轨迹规划的任务书.docx
基于遗传算法的机械臂时间最优轨迹规划的任务书一、研究背景随着工业自动化的不断深入,机械臂的应用越来越广泛。机械臂在工业生产中的应用不仅能较大地提升生产效率,也能够减少人类的劳动强度,降低生产成本,提高产品质量等。机械臂的规划一般包括路径规划、轨迹规划等。其中,轨迹规划是保证机械臂平滑运动的关键。传统轨迹规划方法多为手动设定机械臂移动轨迹,这种方法的局限性较大。因此,如何利用计算机实现最优轨迹规划成为机械臂领域的一个重要问题。基于遗传算法的机械臂时间最优轨迹规划可为机械臂的运动提供最优解决方案。遗传算法以其