
柔性传感器及其制备方法.pdf

猫巷****松臣

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
柔性传感器及其制备方法.pdf
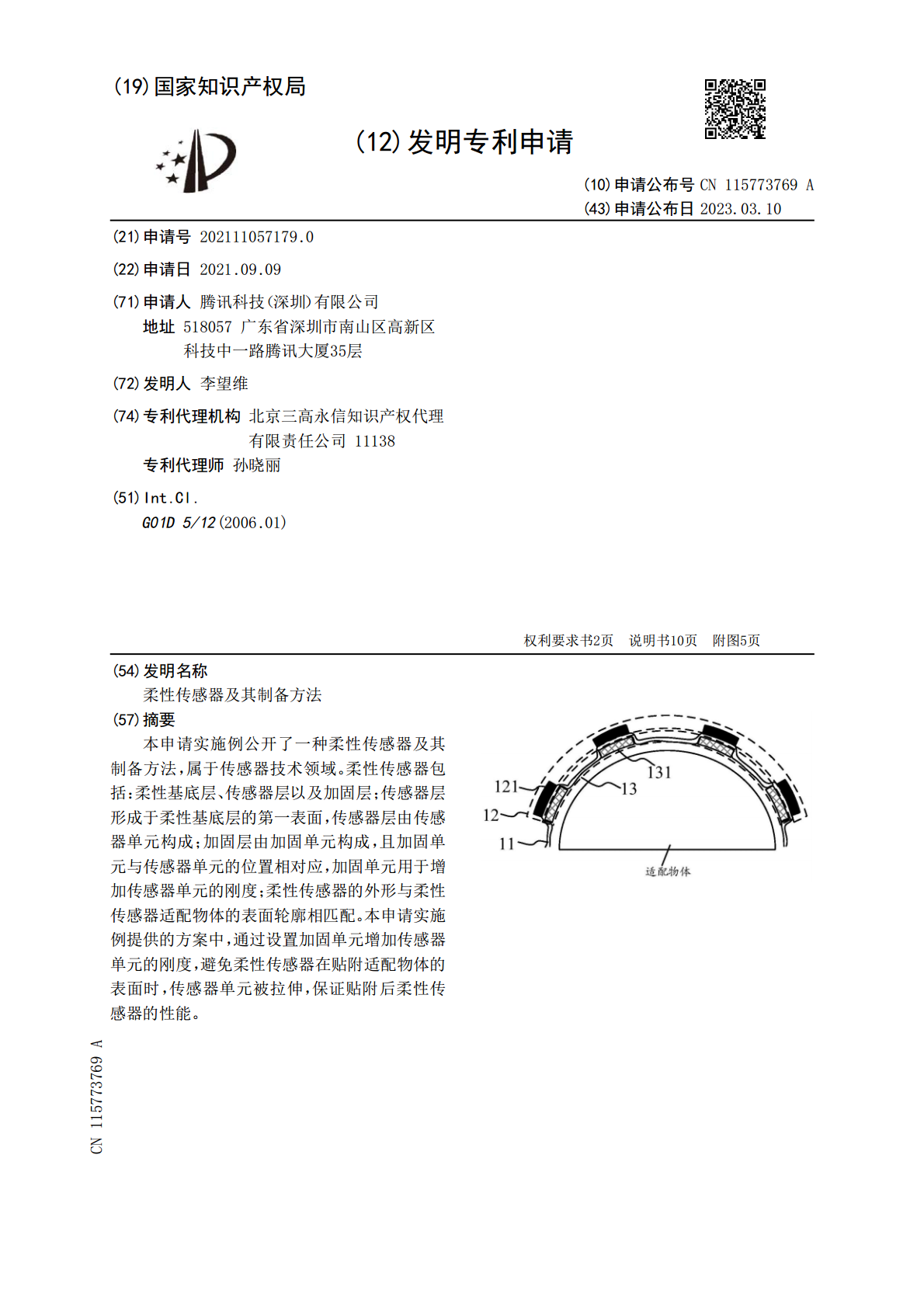
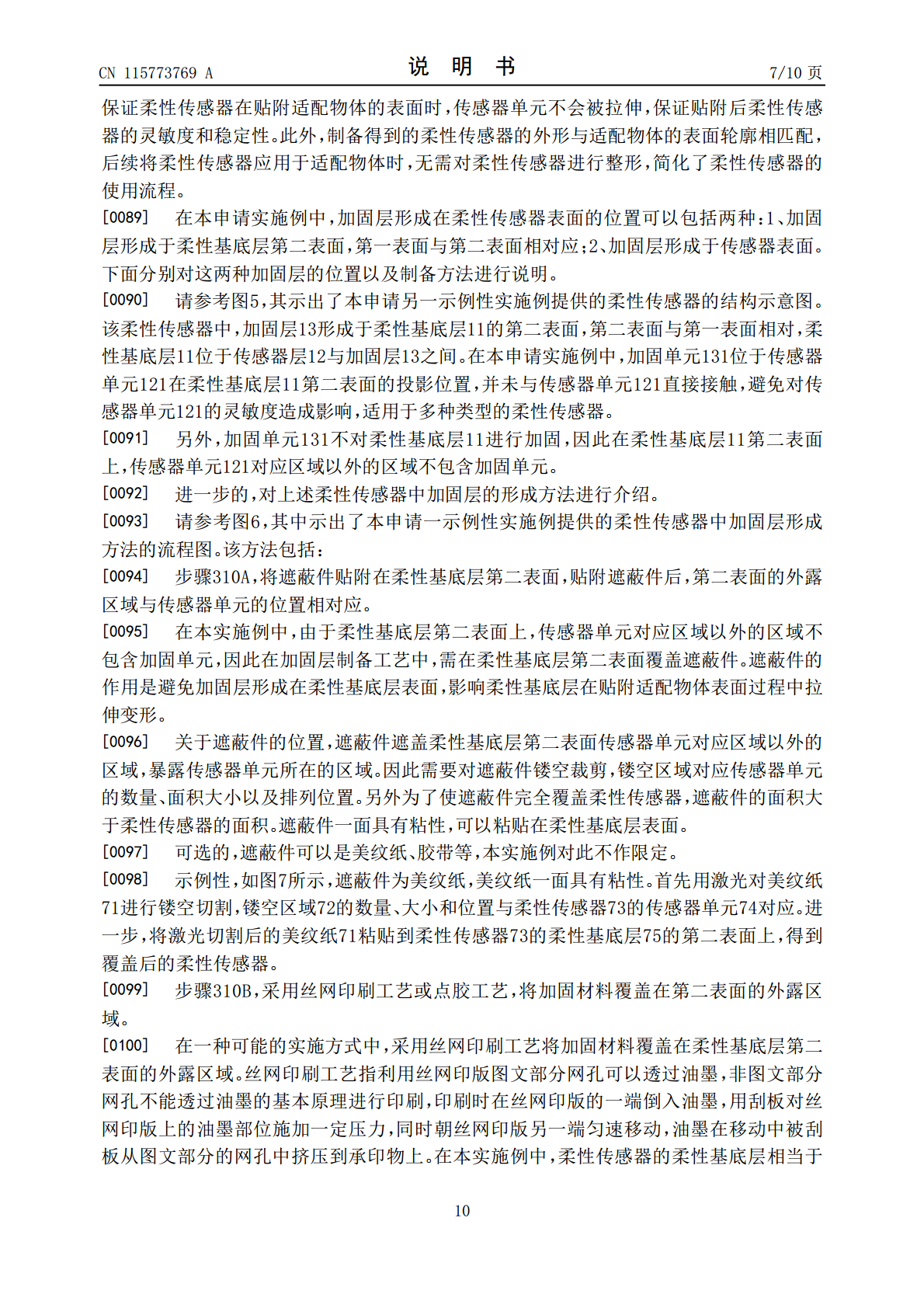
本申请实施例公开了一种柔性传感器及其制备方法,属于传感器技术领域。柔性传感器包括:柔性基底层、传感器层以及加固层;传感器层形成于柔性基底层的第一表面,传感器层由传感器单元构成;加固层由加固单元构成,且加固单元与传感器单元的位置相对应,加固单元用于增加传感器单元的刚度;柔性传感器的外形与柔性传感器适配物体的表面轮廓相匹配。本申请实施例提供的方案中,通过设置加固单元增加传感器单元的刚度,避免柔性传感器在贴附适配物体的表面时,传感器单元被拉伸,保证贴附后柔性传感器的性能。
柔性触摸传感器及其制备方法.pdf
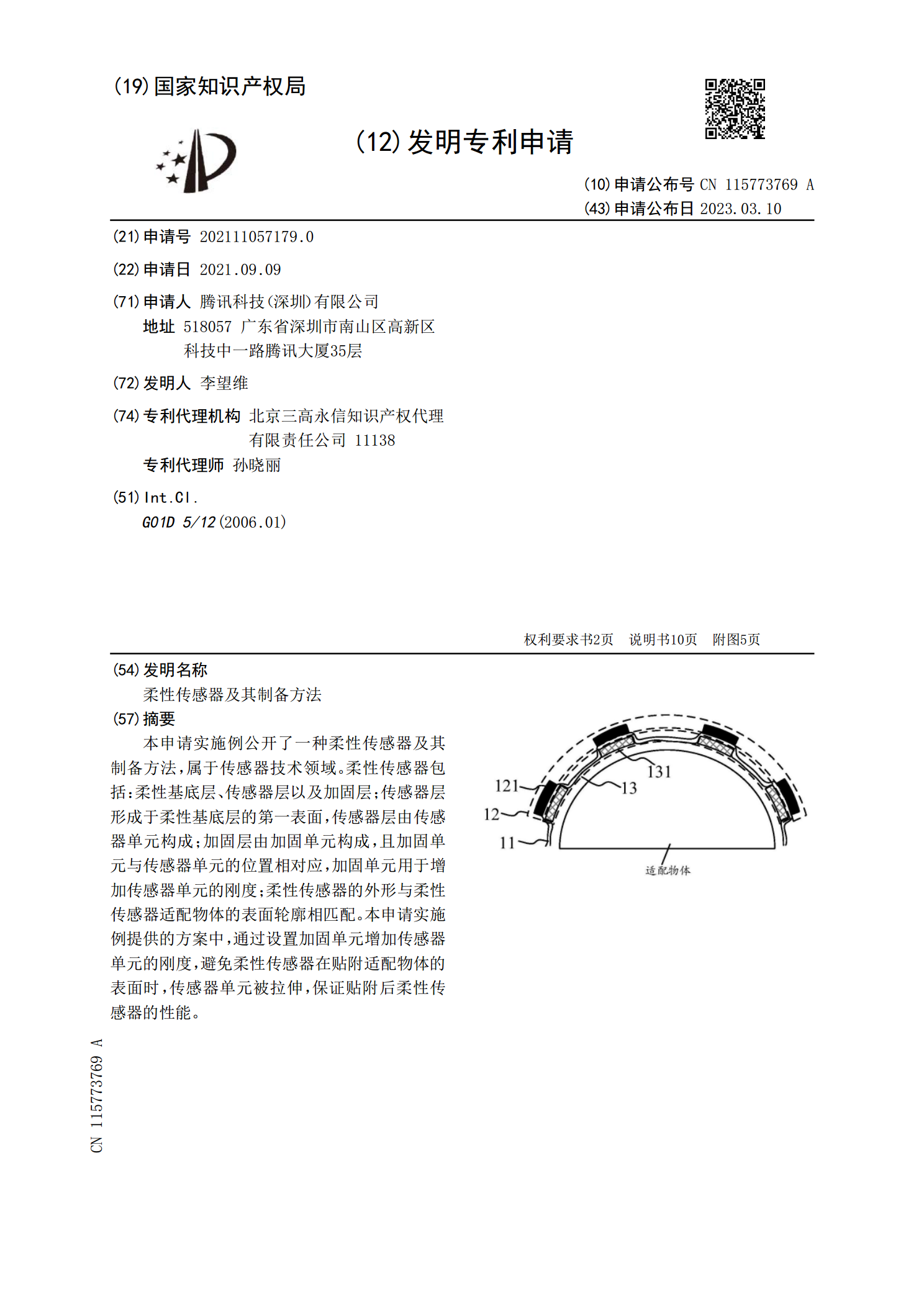
本发明涉及一种柔性触摸传感器及其制备方法。该柔性触摸传感器包括双面导电膜、第一金属轮廓层、第二金属轮廓层、引线层以及导电体,双面导电膜的第一表面连接有第一金属轮廓层,第一表面具有第一蚀刻图案,第一金属轮廓层具有第一蚀刻线路,双面导电膜以及第一金属轮廓层具有贯穿双面导电膜以及第一金属轮廓层的连通孔,连通孔内具有导电体,双面导电膜的第二表面连接有第二金属轮廓层以及引线层,第二表面具有第二蚀刻图案,第二金属轮廓层具有第二蚀刻线路,引线层具有第一引线线路以及第二引线线路。该柔性触摸传感器,仅需单面绑定FPC,利于
对称LC传感器及其制备方法、无线无源柔性应变传感器及其制备方法.pdf
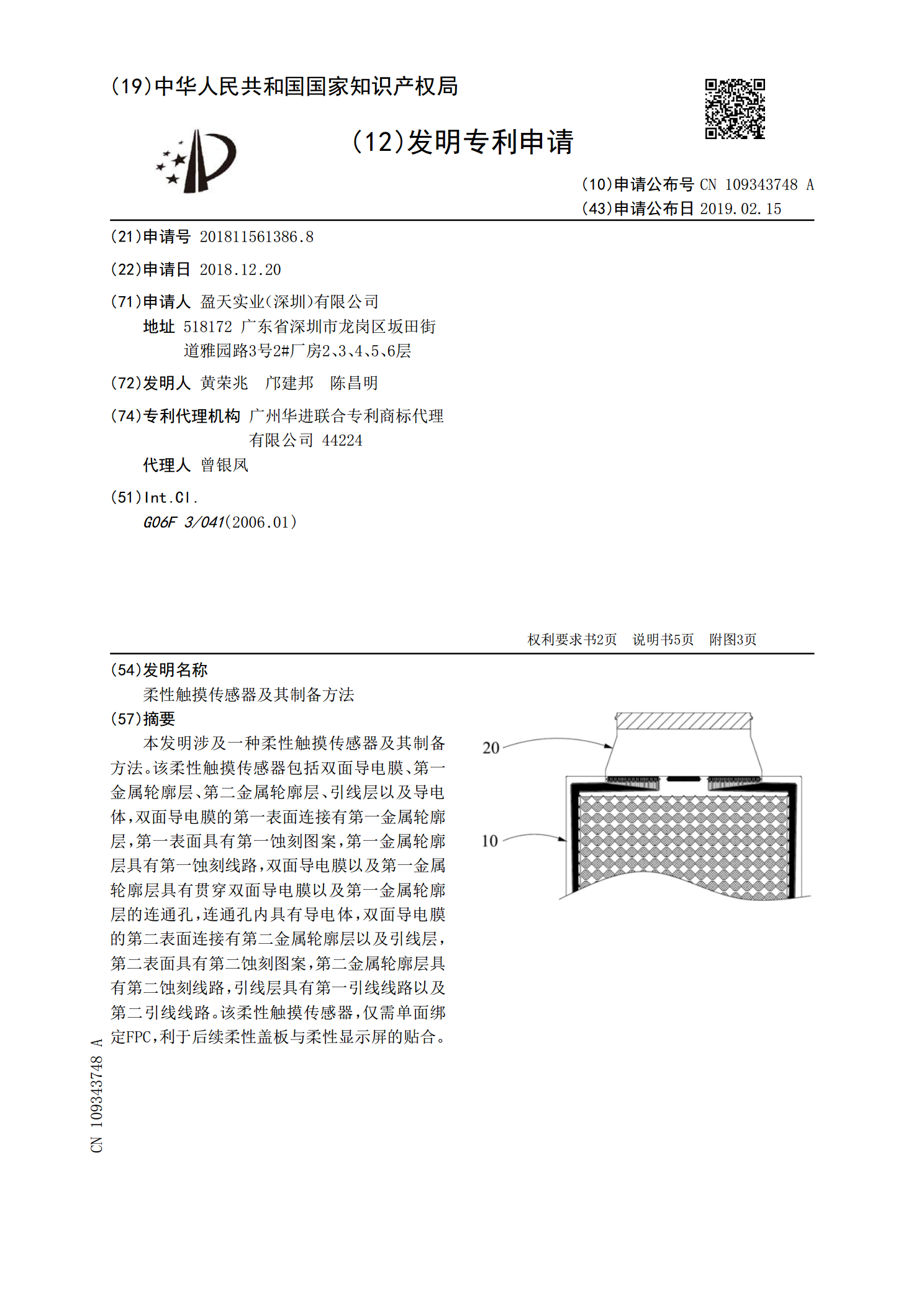
本发明公开了一种对称LC传感器、无线无源应变传感器及它们的制备方法,该无线无源应变传感器,包括两个相同的对称LC传感器,分别位于测量区域和非测量区域,其中对称LC传感器包括上下对齐设置的第一电感结构和第二电感结构。它们的制备方法包括依次在衬底上制备第一电感结构和第二电感结构,得到对称LC传感器,将两个对称LC传感器组合成无线无源应变传感器。本发明对称LC传感器具有双电感模型,可以有效的增强传感器的灵敏度和分辨率,具有灵敏度高等优点,且由其构建的无线无源应变传感器还具有抗干扰能力强、易于安装等优点,是一种性
驻极体柔性触觉传感器及其制备方法与充电方法.pdf
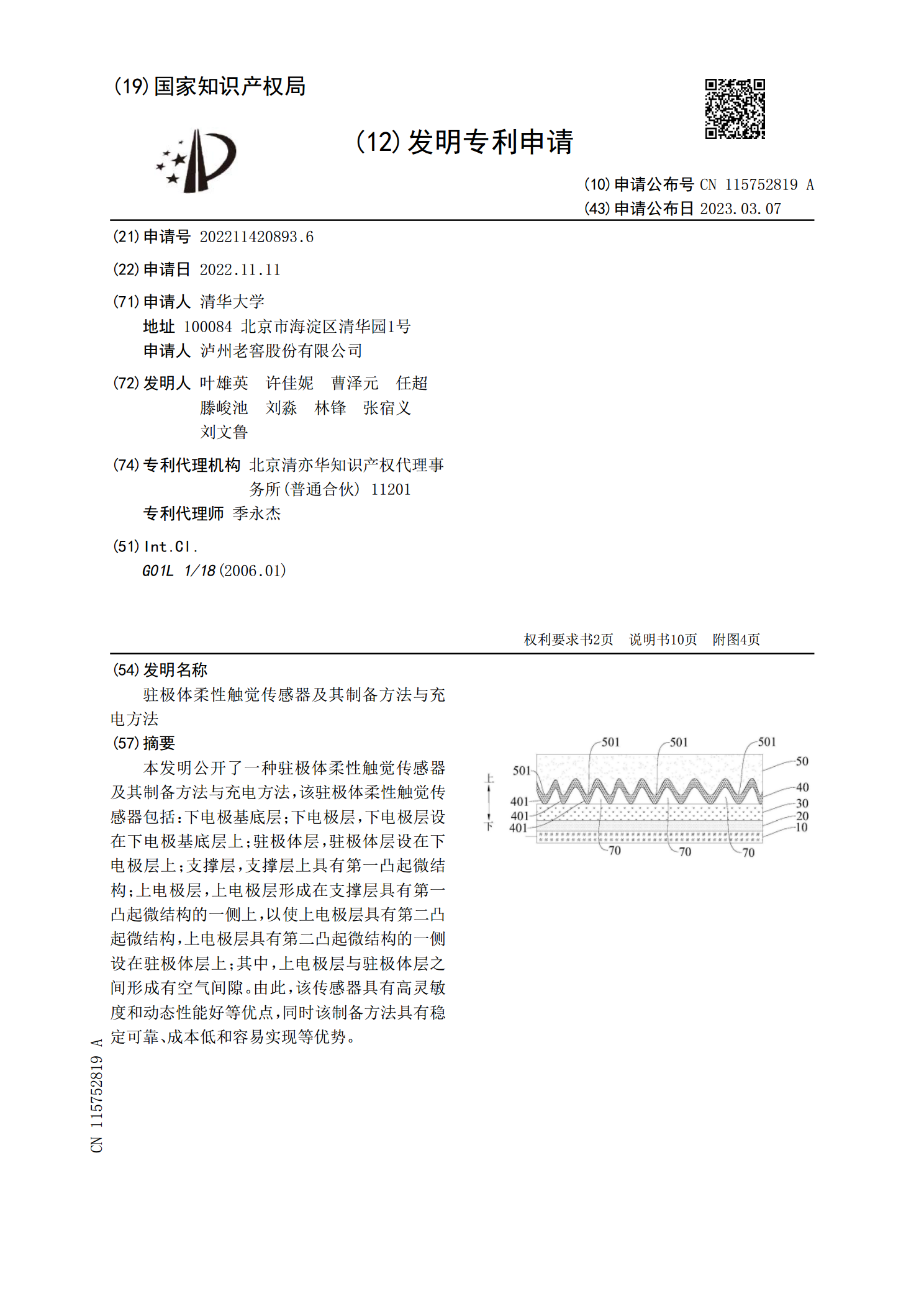
本发明公开了一种驻极体柔性触觉传感器及其制备方法与充电方法,该驻极体柔性触觉传感器包括:下电极基底层;下电极层,下电极层设在下电极基底层上;驻极体层,驻极体层设在下电极层上;支撑层,支撑层上具有第一凸起微结构;上电极层,上电极层形成在支撑层具有第一凸起微结构的一侧上,以使上电极层具有第二凸起微结构,上电极层具有第二凸起微结构的一侧设在驻极体层上;其中,上电极层与驻极体层之间形成有空气间隙。由此,该传感器具有高灵敏度和动态性能好等优点,同时该制备方法具有稳定可靠、成本低和容易实现等优势。
一种柔性传感器及其制备方法与应用.pdf
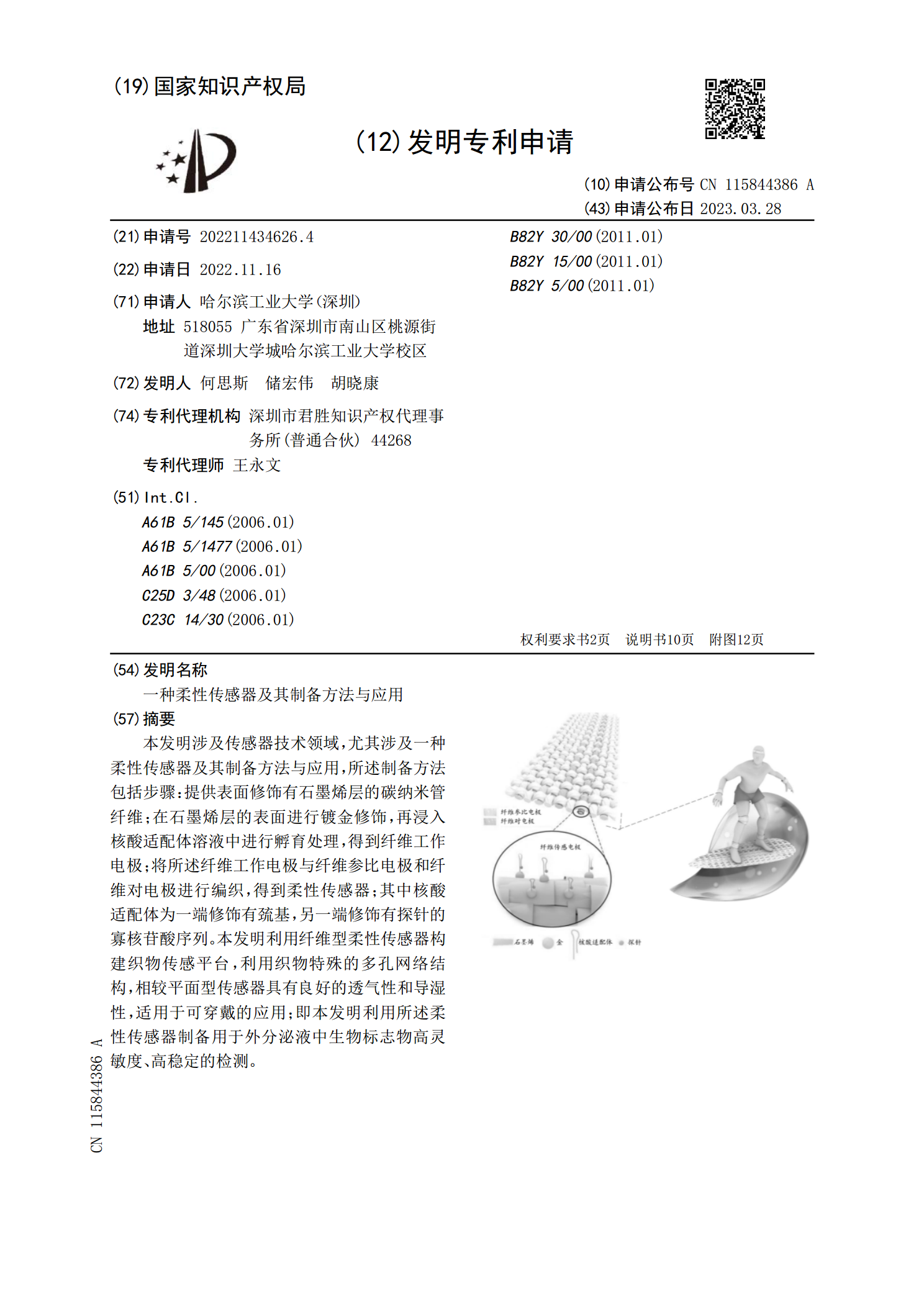
本发明涉及传感器技术领域,尤其涉及一种柔性传感器及其制备方法与应用,所述制备方法包括步骤:提供表面修饰有石墨烯层的碳纳米管纤维;在石墨烯层的表面进行镀金修饰,再浸入核酸适配体溶液中进行孵育处理,得到纤维工作电极;将所述纤维工作电极与纤维参比电极和纤维对电极进行编织,得到柔性传感器;其中核酸适配体为一端修饰有巯基,另一端修饰有探针的寡核苷酸序列。本发明利用纤维型柔性传感器构建织物传感平台,利用织物特殊的多孔网络结构,相较平面型传感器具有良好的透气性和导湿性,适用于可穿戴的应用;即本发明利用所述柔性传感器制备