
卸船机操控系统及操控方法.pdf

一只****ua


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
卸船机操控系统及操控方法.pdf
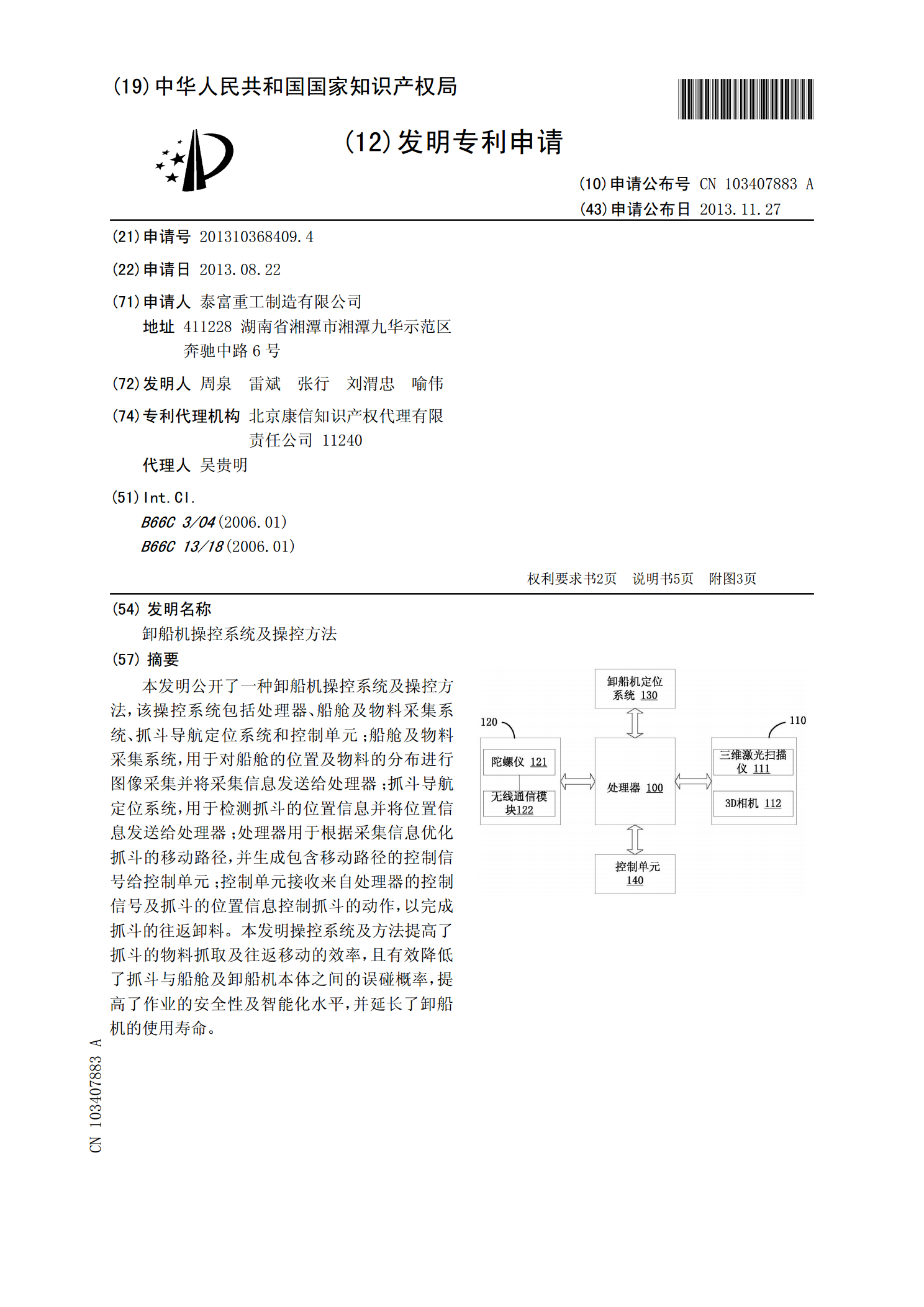
本发明公开了一种卸船机操控系统及操控方法,该操控系统包括处理器、船舱及物料采集系统、抓斗导航定位系统和控制单元;船舱及物料采集系统,用于对船舱的位置及物料的分布进行图像采集并将采集信息发送给处理器;抓斗导航定位系统,用于检测抓斗的位置信息并将位置信息发送给处理器;处理器用于根据采集信息优化抓斗的移动路径,并生成包含移动路径的控制信号给控制单元;控制单元接收来自处理器的控制信号及抓斗的位置信息控制抓斗的动作,以完成抓斗的往返卸料。本发明操控系统及方法提高了抓斗的物料抓取及往返移动的效率,且有效降低了抓斗与船
锚杆机的操控系统及带该操控系统的锚杆机.pdf
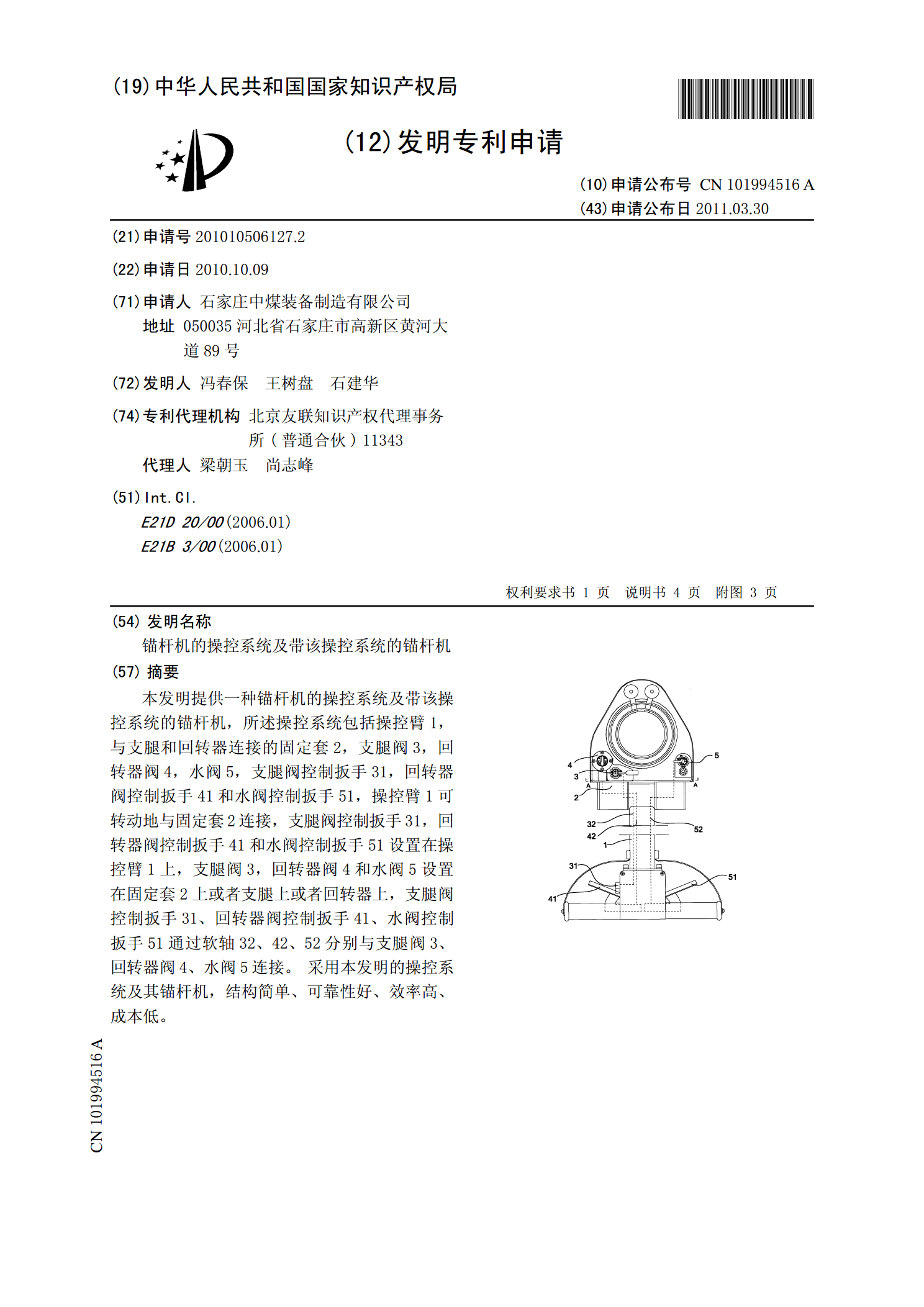
本发明提供一种锚杆机的操控系统及带该操控系统的锚杆机,所述操控系统包括操控臂1,与支腿和回转器连接的固定套2,支腿阀3,回转器阀4,水阀5,支腿阀控制扳手31,回转器阀控制扳手41和水阀控制扳手51,操控臂1可转动地与固定套2连接,支腿阀控制扳手31,回转器阀控制扳手41和水阀控制扳手51设置在操控臂1上,支腿阀3,回转器阀4和水阀5设置在固定套2上或者支腿上或者回转器上,支腿阀控制扳手31、回转器阀控制扳手41、水阀控制扳手51通过软轴32、42、52分别与支腿阀3、回转器阀4、水阀5连接。采用本发明的

智能洗衣机操控系统.pdf
本发明涉及洗衣机控制领域,提供一种智能洗衣机操控系统,包括洗涤系统、耗材供应系统和主控系统。所述耗材供应系统包括洗涤用水流量计、质量传感器、耗材盒、抽液总成、信息读取装置,所述耗材盒上设有耗材信息模块;所述主控系统包括电源控制模块、中央处理模块、信息存贮模块、浑浊度传感器;所述信息读取装置读取耗材信息模块内的耗材信息,并将耗材盒的位置坐标信息和相对应的耗材信息存贮在信息存贮模块内。本发明将耗材供应系统和主控系统与洗涤系统结合,使用者将耗材盒直接装入洗衣机后,主控系统根据读取到的耗材信息和用户设定的洗涤程序
操控支承装置及操控支承系统.pdf
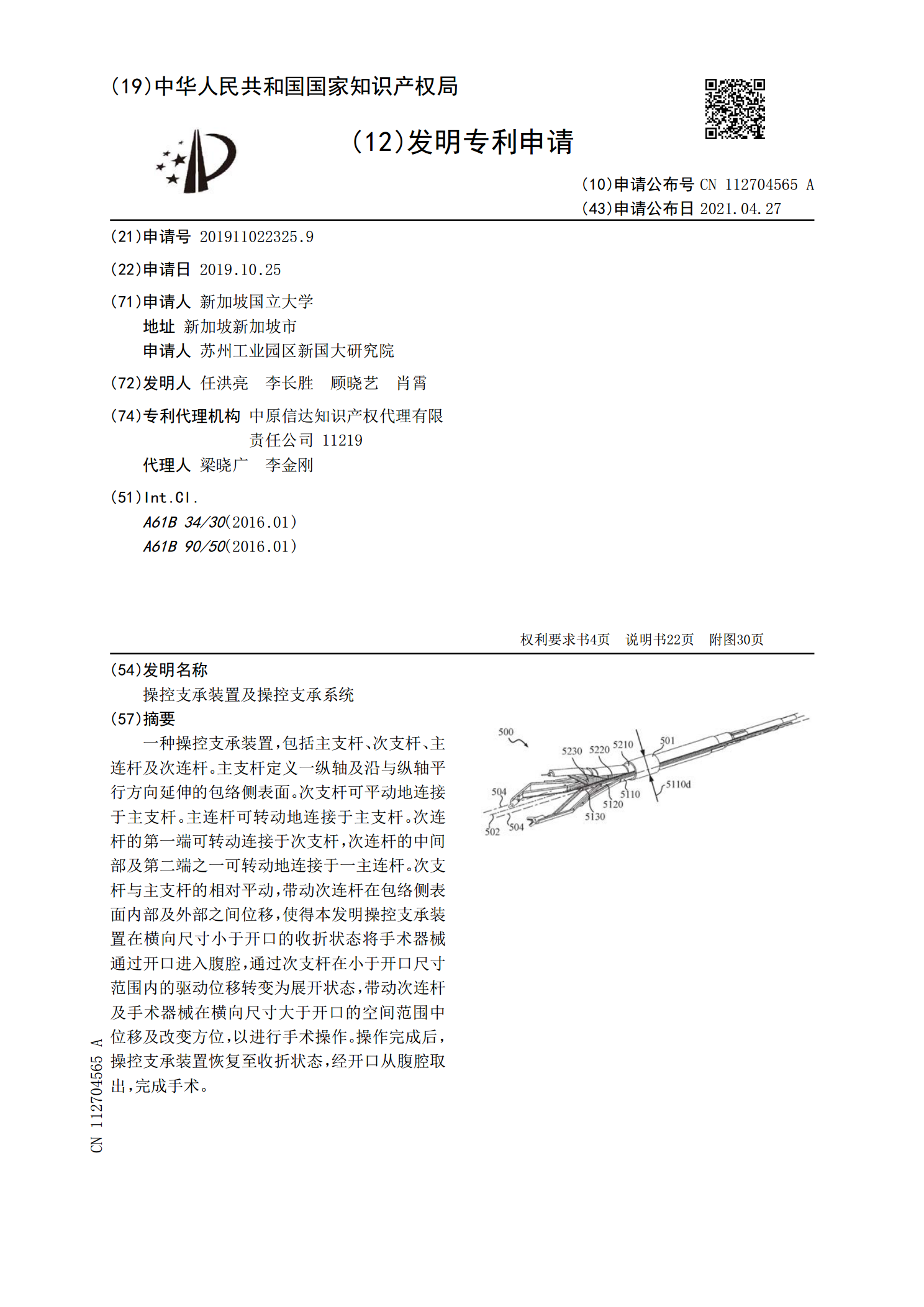
一种操控支承装置,包括主支杆、次支杆、主连杆及次连杆。主支杆定义一纵轴及沿与纵轴平行方向延伸的包络侧表面。次支杆可平动地连接于主支杆。主连杆可转动地连接于主支杆。次连杆的第一端可转动连接于次支杆,次连杆的中间部及第二端之一可转动地连接于一主连杆。次支杆与主支杆的相对平动,带动次连杆在包络侧表面内部及外部之间位移,使得本发明操控支承装置在横向尺寸小于开口的收折状态将手术器械通过开口进入腹腔,通过次支杆在小于开口尺寸范围内的驱动位移转变为展开状态,带动次连杆及手术器械在横向尺寸大于开口的空间范围中位移及改变方

一种智能眼镜、智能眼镜的操控方法及操控系统.pdf
本发明提供一种智能眼镜、智能眼镜的操控方法及操控系统,所述智能眼镜操控系统包括:第一人机交互模块,于智能眼镜中展示与预设车机的娱乐界面对应的第一人机交互界面,在接收到对第一人机交互界面进行操控的第一操控信号时执行对应的操作以实现预设车机的娱乐功能;第二人机交互模块,展示与预设功能对应的第二人机交互界面以实现对应的预设功能;启动模块,用于在接收到外部启动信号和内部启动信号时分别启动第一人机交互模块和第二人机交互模块运行。本发明使得当用户戴起智能眼镜后,实现预设车机音乐、广播、摄像等娱乐功能,不必转头去查看和