
对游戏控制器校准和偏置的系统和方法.pdf

是你****岺呀

1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共43页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

对游戏控制器校准和偏置的系统和方法.pdf
本发明描述了用于校准和偏置的系统和方法。在一个例子中,描述了确定用户的玩游戏高度的方法。该方法包括通过使用来自捕获设备的图像数据将被跟踪物的第一位置与第一角相联系,接收来自用户的显示屏的第一角的标识;通过使用来自捕获设备的图像数据将被跟踪物的第二位置与第二角相联系,接收来自用户的显示屏的第二角的标识;以及在第一和第二角与被跟踪物之间建立三角形,以便定义用户所作的运动的范围。被跟踪物由用户保持着。该方法进一步包括根据运动的范围定义用户保持被跟踪物的高度。

用于校准机器控制器的方法和系统.pdf
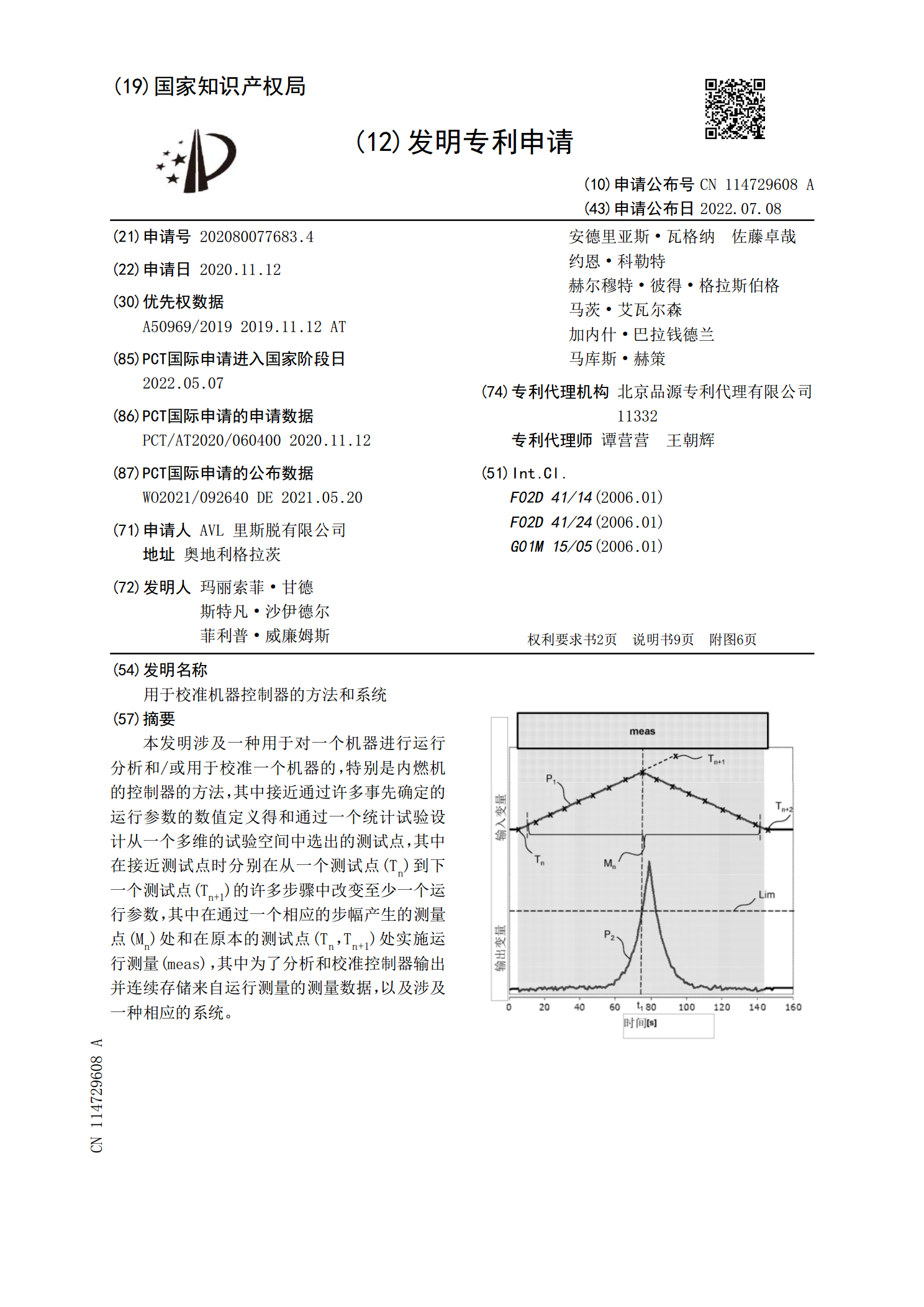
本发明涉及一种用于对一个机器进行运行分析和/或用于校准一个机器的,特别是内燃机的控制器的方法,其中接近通过许多事先确定的运行参数的数值定义得和通过一个统计试验设计从一个多维的试验空间中选出的测试点,其中在接近测试点时分别在从一个测试点(T<base:Sub>n</base:Sub>)到下一个测试点(T<base:Sub>n+1</base:Sub>)的许多步骤中改变至少一个运行参数,其中在通过一个相应的步幅产生的测量点(M<base:Sub>n</base:Sub>)处和在原本的测试点(T<base:Su
用于校准机器控制器的方法和系统.pdf
本发明涉及一种用于对一个机器进行运行分析和/或用于校准一个机器的,特别是内燃机的控制器的方法,其中接近通过许多事先确定的运行参数的数值定义得和通过一个统计试验设计从一个多维的试验空间中选出的测试点,其中在接近测试点时分别在从一个测试点(T<base:Sub>n</base:Sub>)到下一个测试点(T<base:Sub>n+1</base:Sub>)的许多步骤中改变至少一个运行参数,其中在通过一个相应的步幅产生的测量点(M<base:Sub>n</base:Sub>)处和在原本的测试点(T<base:Su

校准装置、校准系统和校准方法.pdf
校准装置10中的捕获图像获取单元30获取使用鱼眼成像装置12对校准图表成像获得的图像的数据。畸变校正单元34对成像装置的参数进行假设,考虑到投影方法来进行校正,并且调整参数直到获得原始图表的图像。伪图像绘制单元42使用图表模型数据来绘制伪捕获图像。视点调整单元44将伪图像和捕获图像进行比较,并根据标记位置或图案间隔之间的差异来调整虚拟相机的视点位置,以识别成像装置12的位置。

机器人系统和校准方法.pdf
本发明提供一种机器人系统和校准方法。该机器人系统包括:机器人(10)、被安装于机器人(10)的工具(20)、拍摄装置(40)、以及对机器人(10)和工具(20)进行控制的控制部,控制部被构成为:将机器人(10)的前端部配置于多个校准用位置,使工具(20)在多个校准用位置的每个位置处动作,并使拍摄装置(40)拍摄通过工具动作处理而照射到对象物(W)的光或者被残留于对象物(W)的痕跡,基于由拍摄装置(40)获取的图像中的所述光的照射位置或者所述痕跡的位置与预定的基准位置之间的比较,进行校准。