
一种运动目标的跟踪方法和装置.pdf

雨巷****珺琦

1/10
2/10

3/10
4/10

5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种运动目标的跟踪方法和装置.pdf
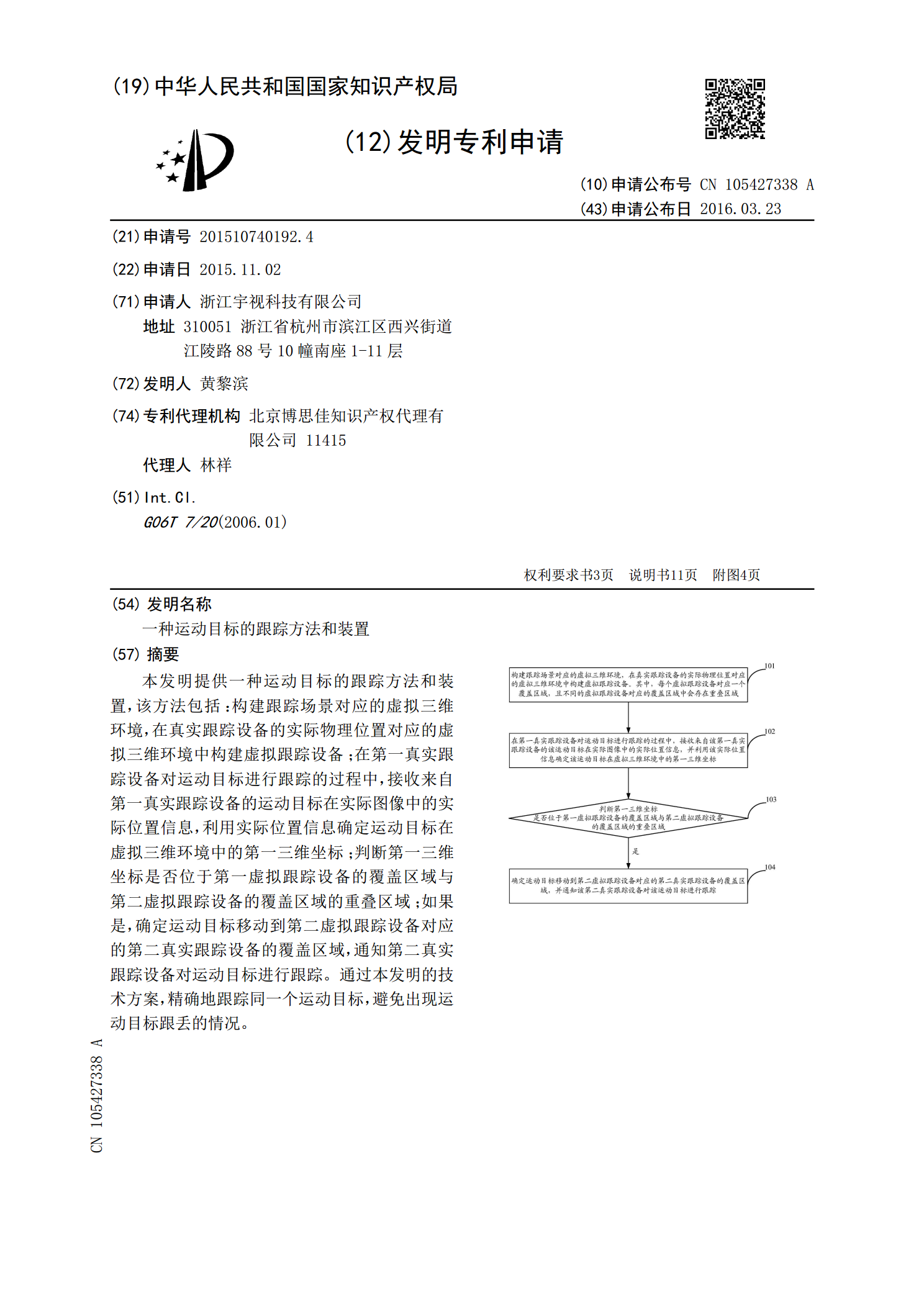
本发明提供一种运动目标的跟踪方法和装置,该方法包括:构建跟踪场景对应的虚拟三维环境,在真实跟踪设备的实际物理位置对应的虚拟三维环境中构建虚拟跟踪设备;在第一真实跟踪设备对运动目标进行跟踪的过程中,接收来自第一真实跟踪设备的运动目标在实际图像中的实际位置信息,利用实际位置信息确定运动目标在虚拟三维环境中的第一三维坐标;判断第一三维坐标是否位于第一虚拟跟踪设备的覆盖区域与第二虚拟跟踪设备的覆盖区域的重叠区域;如果是,确定运动目标移动到第二虚拟跟踪设备对应的第二真实跟踪设备的覆盖区域,通知第二真实跟踪设备对运动

基于移动端单目和IMU融合的稳定运动跟踪方法和装置.pdf
本发明公开了一种基于移动端单目和IMU融合的稳定运动跟踪方法和装置,属于AR/VR运动跟踪技术领域,所述方法包括:判断图像的当前帧的跟踪特征点数目是否大于预设阈值,如果是,则采用光流法进行特征点跟踪,得到相机的当前位姿,如果否,则采用FAST特征检测算子获取特征点,并采用BRIEF算法计算描述子对图像进行特征匹配,得到相机的当前位姿;对相机的当前位姿进行卡尔曼滤波,得到视觉位姿;获取IMU在三维空间产生的加速度和角速度值,并对加速度和角速度值进行积分运算,得到IMU位姿;对视觉位姿和IMU位姿进行卡尔曼融
一种跟踪目标的运动状态估计方法、系统及电子装置.pdf
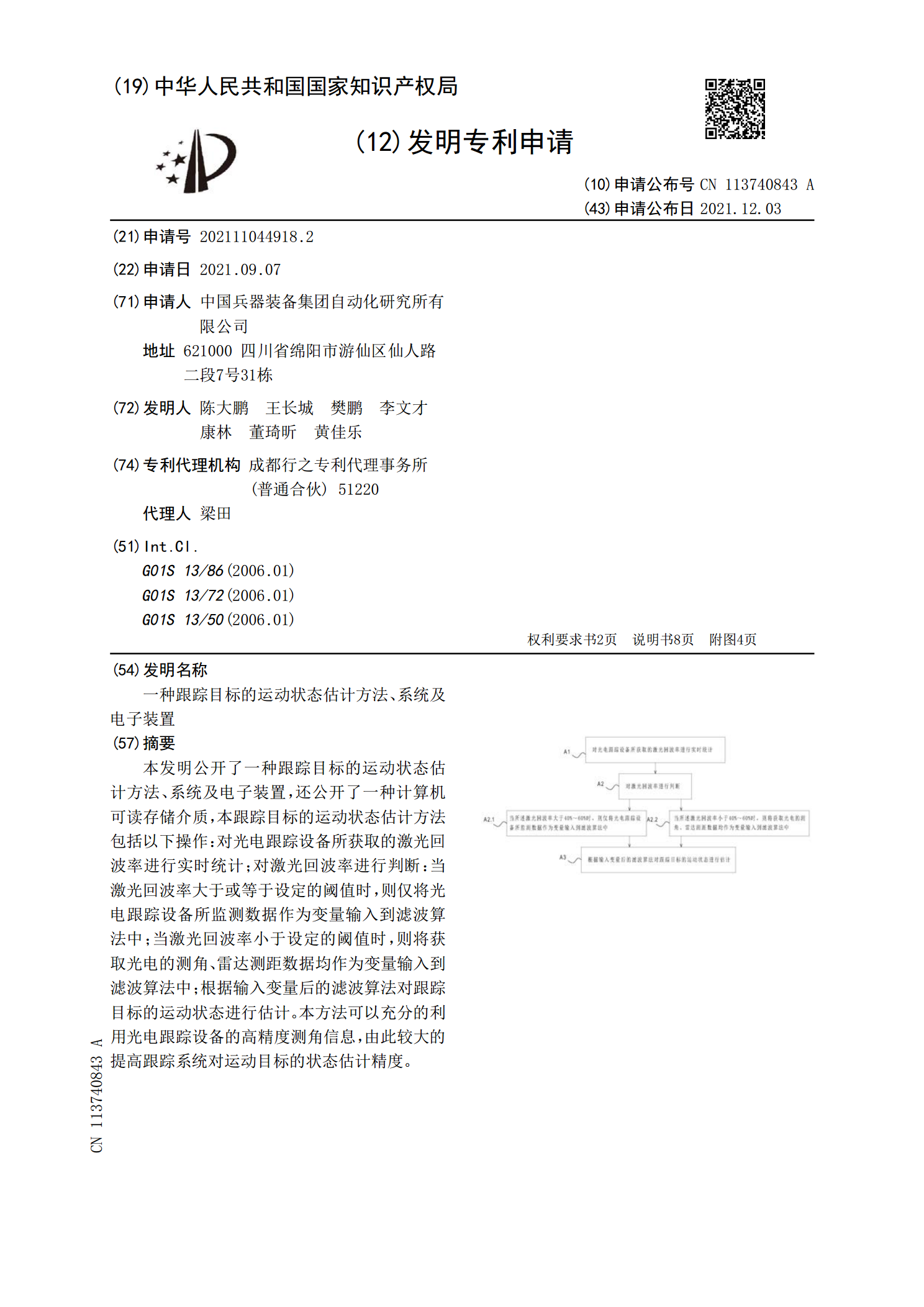
本发明公开了一种跟踪目标的运动状态估计方法、系统及电子装置,还公开了一种计算机可读存储介质,本跟踪目标的运动状态估计方法包括以下操作:对光电跟踪设备所获取的激光回波率进行实时统计;对激光回波率进行判断:当激光回波率大于或等于设定的阈值时,则仅将光电跟踪设备所监测数据作为变量输入到滤波算法中;当激光回波率小于设定的阈值时,则将获取光电的测角、雷达测距数据均作为变量输入到滤波算法中;根据输入变量后的滤波算法对跟踪目标的运动状态进行估计。本方法可以充分的利用光电跟踪设备的高精度测角信息,由此较大的提高跟踪系统对

一种控制监控设备联动跟踪运动目标的方法及装置.pdf
本发明属于视频监控领域,提供了一种控制监控设备联动跟踪运动目标的方法及装置,所述方法包括:接收卫星定位接收系统获取的挂载卫星追踪定位设备的运动目标的地理信息数据;根据所述运动目标地理信息数据,从监控系统摄像机档案库中选择监控设备;利用所述监控设备对所述运动目标进行跟踪。本发明通过运动目标挂载卫星追踪定位设备,实时传输GIS数据,由监控系统选择并指挥合适的监控设备进行跟踪,当运动目标超出其跟踪范围时,监控系统软件平台根据运动目标信息选择其他合适的监控设备进行接力,以实现对目标的全程跟踪,还可使地面监控系统中
一种用于跟踪多目标的方法及装置.pdf
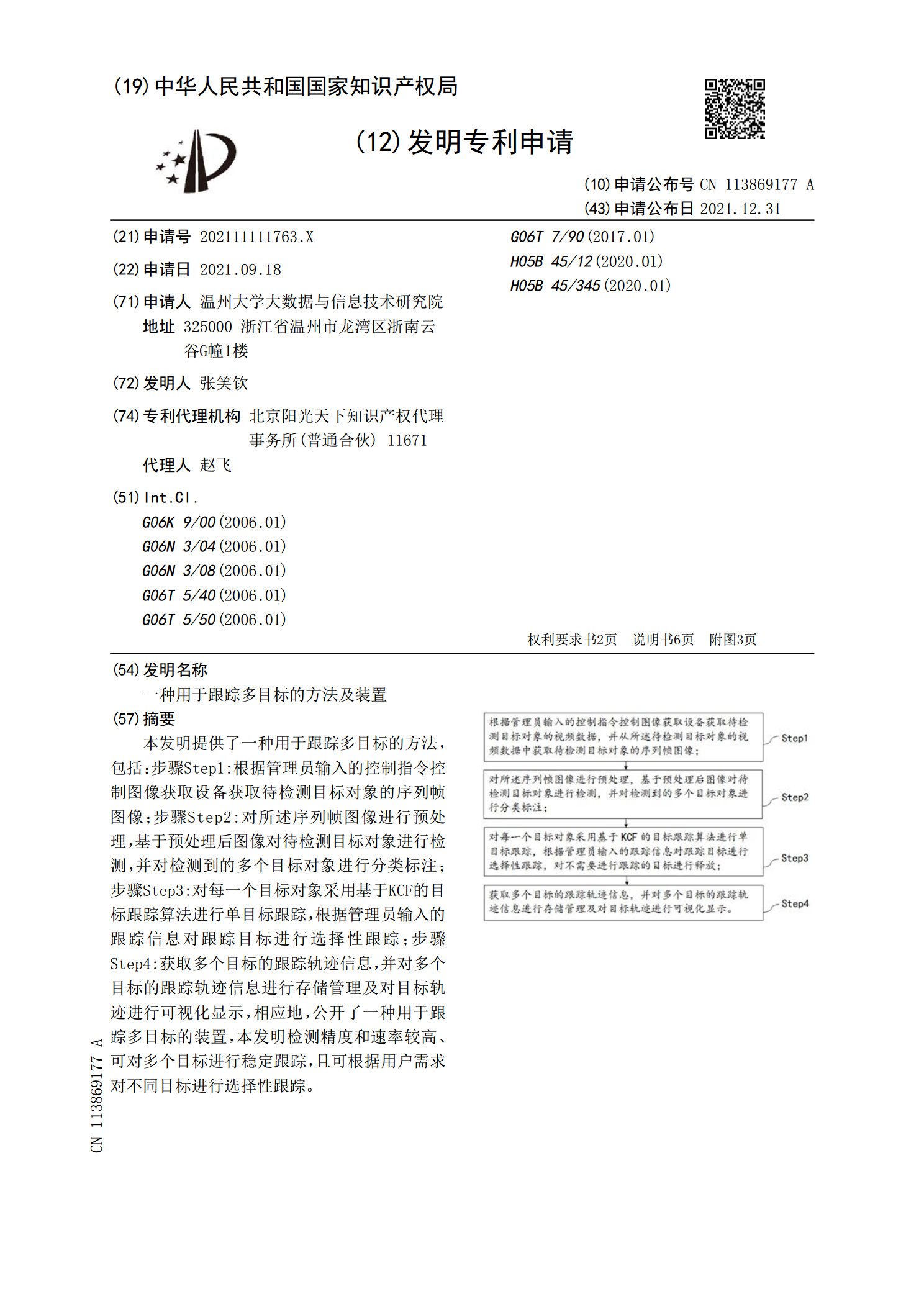
本发明提供了一种用于跟踪多目标的方法,包括:步骤Step1:根据管理员输入的控制指令控制图像获取设备获取待检测目标对象的序列帧图像;步骤Step2:对所述序列帧图像进行预处理,基于预处理后图像对待检测目标对象进行检测,并对检测到的多个目标对象进行分类标注;步骤Step3:对每一个目标对象采用基于KCF的目标跟踪算法进行单目标跟踪,根据管理员输入的跟踪信息对跟踪目标进行选择性跟踪;步骤Step4:获取多个目标的跟踪轨迹信息,并对多个目标的跟踪轨迹信息进行存储管理及对目标轨迹进行可视化显示,相应地,公开了一种