
自主平面清洁机器人.pdf

梦影****主a


1/10

2/10
3/10
4/10
5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共44页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自主平面清洁机器人.pdf
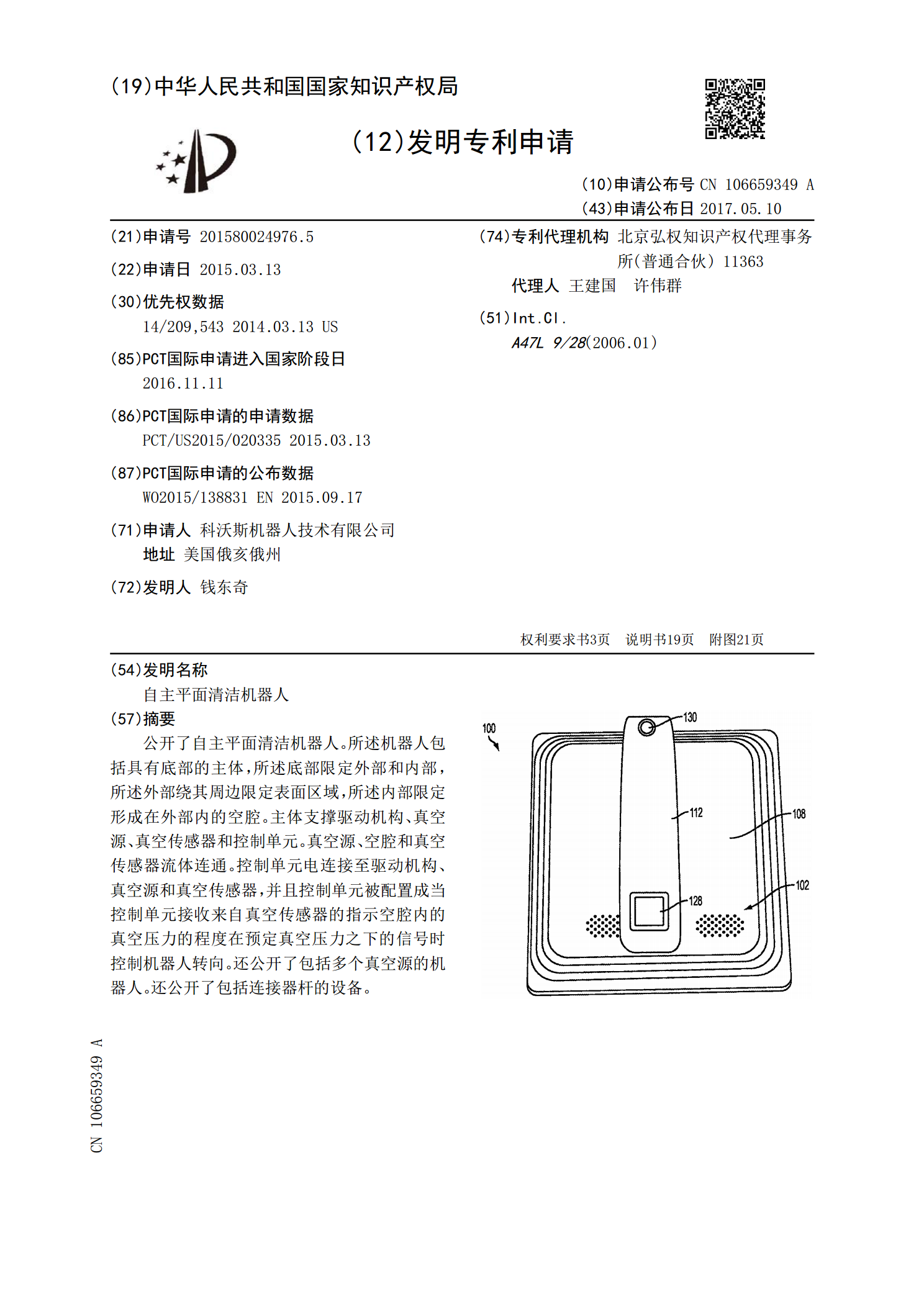
公开了自主平面清洁机器人。所述机器人包括具有底部的主体,所述底部限定外部和内部,所述外部绕其周边限定表面区域,所述内部限定形成在外部内的空腔。主体支撑驱动机构、真空源、真空传感器和控制单元。真空源、空腔和真空传感器流体连通。控制单元电连接至驱动机构、真空源和真空传感器,并且控制单元被配置成当控制单元接收来自真空传感器的指示空腔内的真空压力的程度在预定真空压力之下的信号时控制机器人转向。还公开了包括多个真空源的机器人。还公开了包括连接器杆的设备。

自主机器人的清洁系统.pdf
一种自主清洁机器人,包括:底盘;至少一个机动驱动轮,其安装至所述底盘,并且布置成推动所述机器人穿过表面;以及成对清洁辊,其安装到所述底盘,并且具有暴露在底盘下侧上且至彼此的外表面。所述清洁辊可驱动成在机器人被推进的同时反向旋转,从而配合成将升高的碎屑引导到所述辊之间的机器人中。侧刷被进一步安装至所述底盘,以围绕向上延伸的侧刷轴线在相邻于底盘横向侧的底盘的下方旋转;并且所述成对清洁辊中的第一对清洁辊的外表面横向延伸超过所述成对清洁辊中的第二对清洁辊的外表面且横向超过所述侧刷轴线,使得第一清洁辊限定跨越侧刷轴

用于对清洁表面进行清洁的自主移动机器人.pdf
一种自主移动机器人包括:底盘,其中安装有与控制系统通信的驱动系统;清洁头组合件,其具有下部笼架且安装到所述底盘;碎屑收集箱,其安装到所述底盘;真空气道,其具有真空入口及邻近所述碎屑收集箱定位的气道出口,且经配置以将碎屑从所述清洁头组合件递送到碎屑收集箱,所述真空气道在所述清洁组合件与碎屑收集箱之间延伸且与安置于所述碎屑收集箱内的叶轮流体连通;及清洁头模块,其连接到所述底盘且具有包含前形状改变弹性管的前滚轮及包含后形状改变弹性管的邻近后滚轮,在所述真空入口下方所述后滚轮与所述前滚轮以可旋转方式对置。所述前形

清洁机器人自主避障及遍历方法研究.docx
清洁机器人自主避障及遍历方法研究摘要:近年来,清洁机器人技术的快速发展已经成为了家庭自动化的标志之一。为了提高清洁机器人的效率和安全性,自主避障和遍历成为了研究的热点。本文总结了现有的清洁机器人避障和遍历方法,并探究了室内场景下的路径规划技术和传感器优化方法。实验结果表明,通过对清洁机器人运动轨迹的优化和传感器的优化,可以大幅提高清洁机器人的效率和避障能力。关键字:清洁机器人;自主避障;遍历;路径规划;传感器优化前言:随着家居设计中对美观性的要求越来越高,家庭清洁不再像以前那样传统、单调、重复。如今,越来
清洁模块及自主清洁设备.pdf
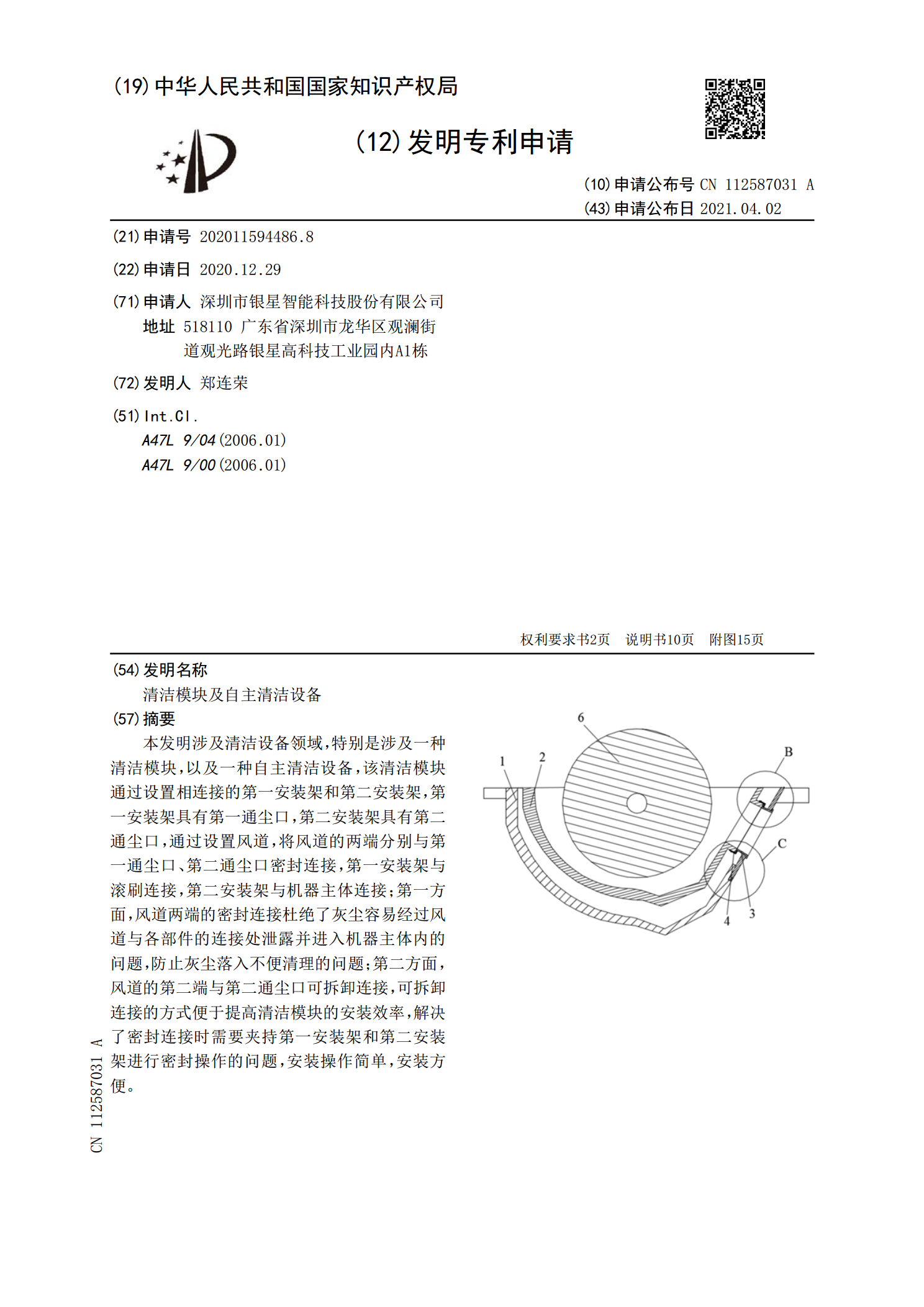
本发明涉及清洁设备领域,特别是涉及一种清洁模块,以及一种自主清洁设备,该清洁模块通过设置相连接的第一安装架和第二安装架,第一安装架具有第一通尘口,第二安装架具有第二通尘口,通过设置风道,将风道的两端分别与第一通尘口、第二通尘口密封连接,第一安装架与滚刷连接,第二安装架与机器主体连接;第一方面,风道两端的密封连接杜绝了灰尘容易经过风道与各部件的连接处泄露并进入机器主体内的问题,防止灰尘落入不便清理的问题;第二方面,风道的第二端与第二通尘口可拆卸连接,可拆卸连接的方式便于提高清洁模块的安装效率,解决了密封连接