
双轴五坐标焊接机器人定位行走装置.pdf

一条****ee


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

双轴五坐标焊接机器人定位行走装置.pdf
本发明涉及焊机设备技术领域,特别涉及一种双轴五坐标焊接机器人定位行走装置;液压立柱下端为液压缸,其芯杆向上;芯杆内镂空呈筒状,上端开口,芯杆中段朝向、背向环形轨道圆心的筒壁设置有对称的芯杆开口;液压立柱芯杆上端开口处安装有下环形磁铁,悬柱上端外缘设置有上环形磁铁,上环形磁铁与下环形磁铁间相斥,悬柱通过该磁接触悬浮于芯杆筒内;悬柱底端安装有下端磁铁,下端磁铁下方芯杆镂空区底端固定安装有放射状均匀布置的下端导线组;本发明通过两个电磁控制的轴坐标对三个位移坐标中的两个进行弥补的方式,在保证设备精度的同时极大的降

一种机器人行走轴装置.pdf
本实用新型公开了一种机器人行走轴装置,包括地轨底座(1),其两侧分别固定一面安装板(2),安装板(2)的下方固定有直线导轨(3)和齿条(4);地轨底座(1)的上方设有移动平台(5),移动平台(5)的两侧均连有侧板(6)和导向板(7),导向板(7)上固定有移动块(8),移动块(8)与直线导轨(3)形成滑动导向配合;移动平台(5)的一侧连有伺服电机(9),伺服电机(9)的输出端向下与驱动齿轮(10)相连,驱动齿轮(10)与齿条(4)相互啮合。本实用新型的优点是可对直线导轨进行有效防护,提高生产安全性,减小设备
一种机器人行走轴装置.pdf
本实用新型公开了一种机器人行走轴装置,包括地轨底座(1),其两侧分别固定一面安装板(2),安装板(2)的下方固定有直线导轨(3)和齿条(4);地轨底座(1)的上方设有移动平台(5),移动平台(5)的两侧均连有侧板(6)和导向板(7),导向板(7)上固定有移动块(8),移动块(8)与直线导轨(3)形成滑动导向配合;移动平台(5)的一侧连有伺服电机(9),伺服电机(9)的输出端向下与驱动齿轮(10)相连,驱动齿轮(10)与齿条(4)相互啮合。本实用新型的优点是可对直线导轨进行有效防护,提高生产安全性,减小设备
双枪坐标焊接机器人.pdf
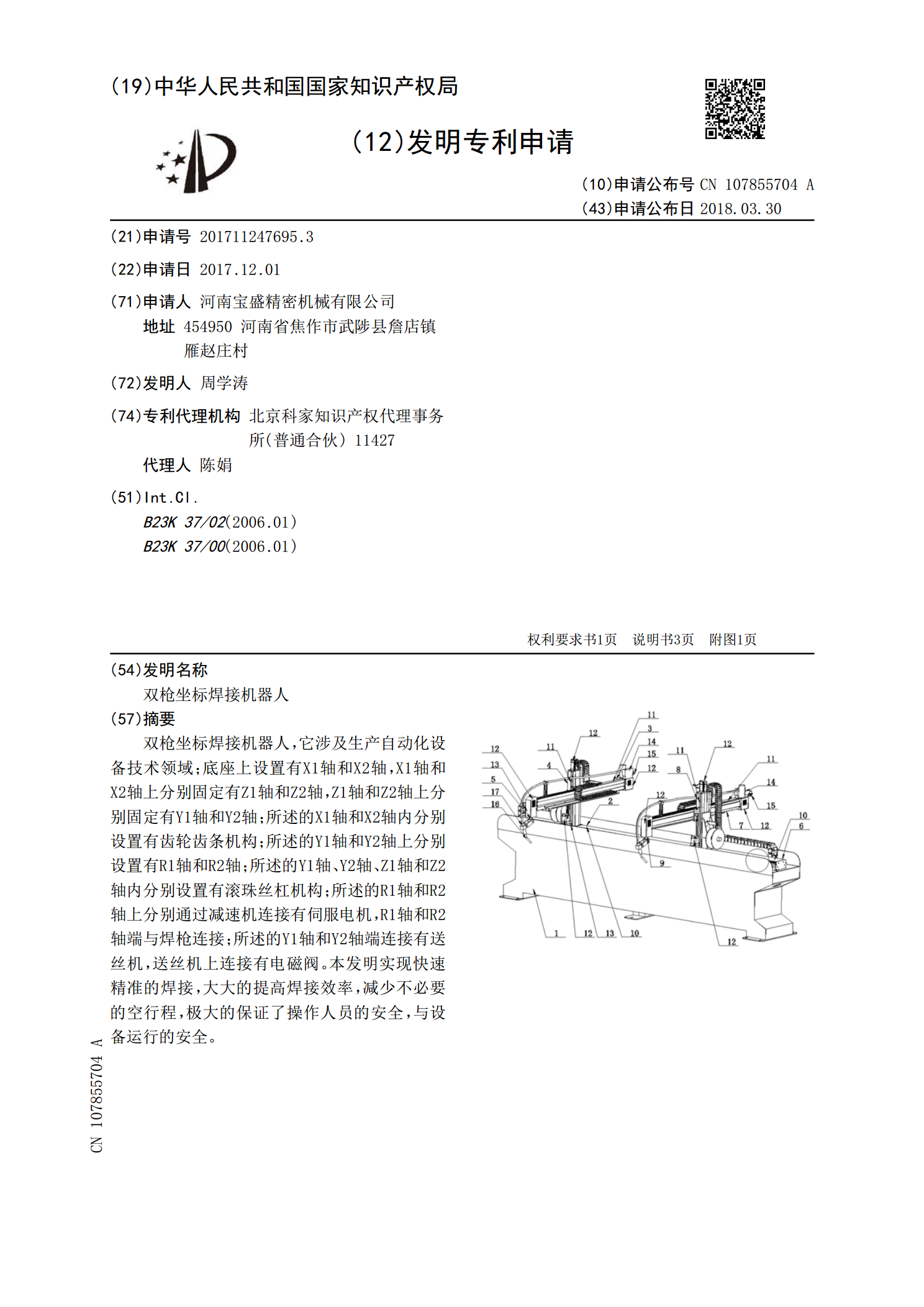
双枪坐标焊接机器人,它涉及生产自动化设备技术领域;底座上设置有X1轴和X2轴,X1轴和X2轴上分别固定有Z1轴和Z2轴,Z1轴和Z2轴上分别固定有Y1轴和Y2轴;所述的X1轴和X2轴内分别设置有齿轮齿条机构;所述的Y1轴和Y2轴上分别设置有R1轴和R2轴;所述的Y1轴、Y2轴、Z1轴和Z2轴内分别设置有滚珠丝杠机构;所述的R1轴和R2轴上分别通过减速机连接有伺服电机,R1轴和R2轴端与焊枪连接;所述的Y1轴和Y2轴端连接有送丝机,送丝机上连接有电磁阀。本发明实现快速精准的焊接,大大的提高焊接效率,减少不必

五轴桁架焊接机器人.pdf
本发明公开了一种五轴桁架焊接机器人,包括两两相互垂直的X轴运动机构、Y轴运动机构和Z轴运动机构,X轴运动机构包括第一纵向滑轨、第二纵向滑轨、第一滑块、第二滑块和第一驱动装置,第一滑块与第一纵向滑轨滑动连接,第二滑块与第二纵向滑轨滑动连接,第一驱动装置连接第一滑块;Y轴运动机构包括横向滑轨、双向滑块和第二驱动装置,双向滑块一端与横向滑轨滑动连接,第二驱动装置连接双向滑块,横向滑轨两端分别设于第一滑块和第二滑块上;Z轴运动机构包括竖直滑轨、第三驱动装置,双向滑块另一端与竖直滑轨滑动连接,第三驱动装置连接双向滑