
一种基于外差检测的激光雷达系统.pdf

是湛****21

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于外差检测的激光雷达系统.pdf
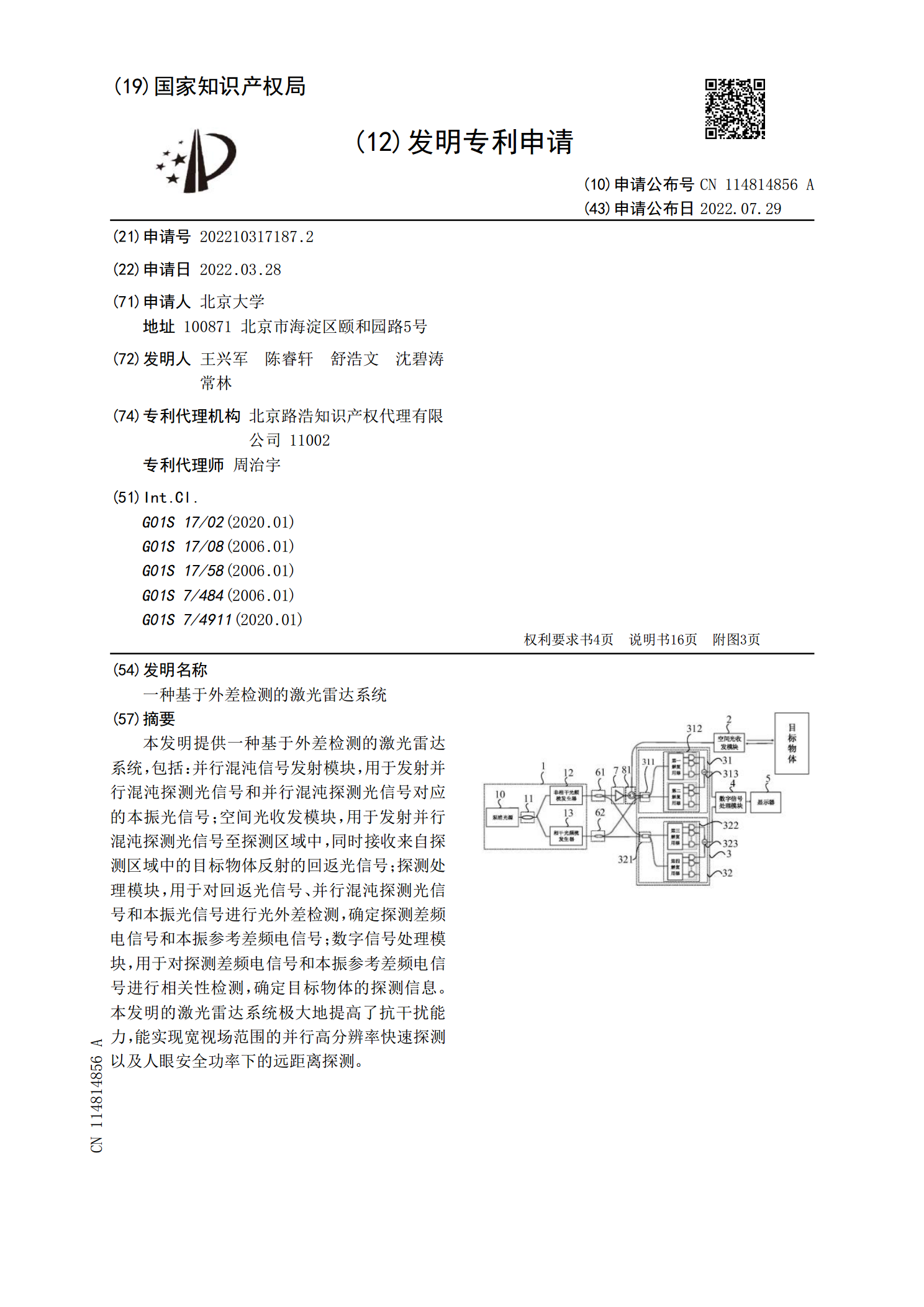
本发明提供一种基于外差检测的激光雷达系统,包括:并行混沌信号发射模块,用于发射并行混沌探测光信号和并行混沌探测光信号对应的本振光信号;空间光收发模块,用于发射并行混沌探测光信号至探测区域中,同时接收来自探测区域中的目标物体反射的回返光信号;探测处理模块,用于对回返光信号、并行混沌探测光信号和本振光信号进行光外差检测,确定探测差频电信号和本振参考差频电信号;数字信号处理模块,用于对探测差频电信号和本振参考差频电信号进行相关性检测,确定目标物体的探测信息。本发明的激光雷达系统极大地提高了抗干扰能力,能实现宽视
一种基于激光雷达的车辆外廓检测方法及系统.pdf
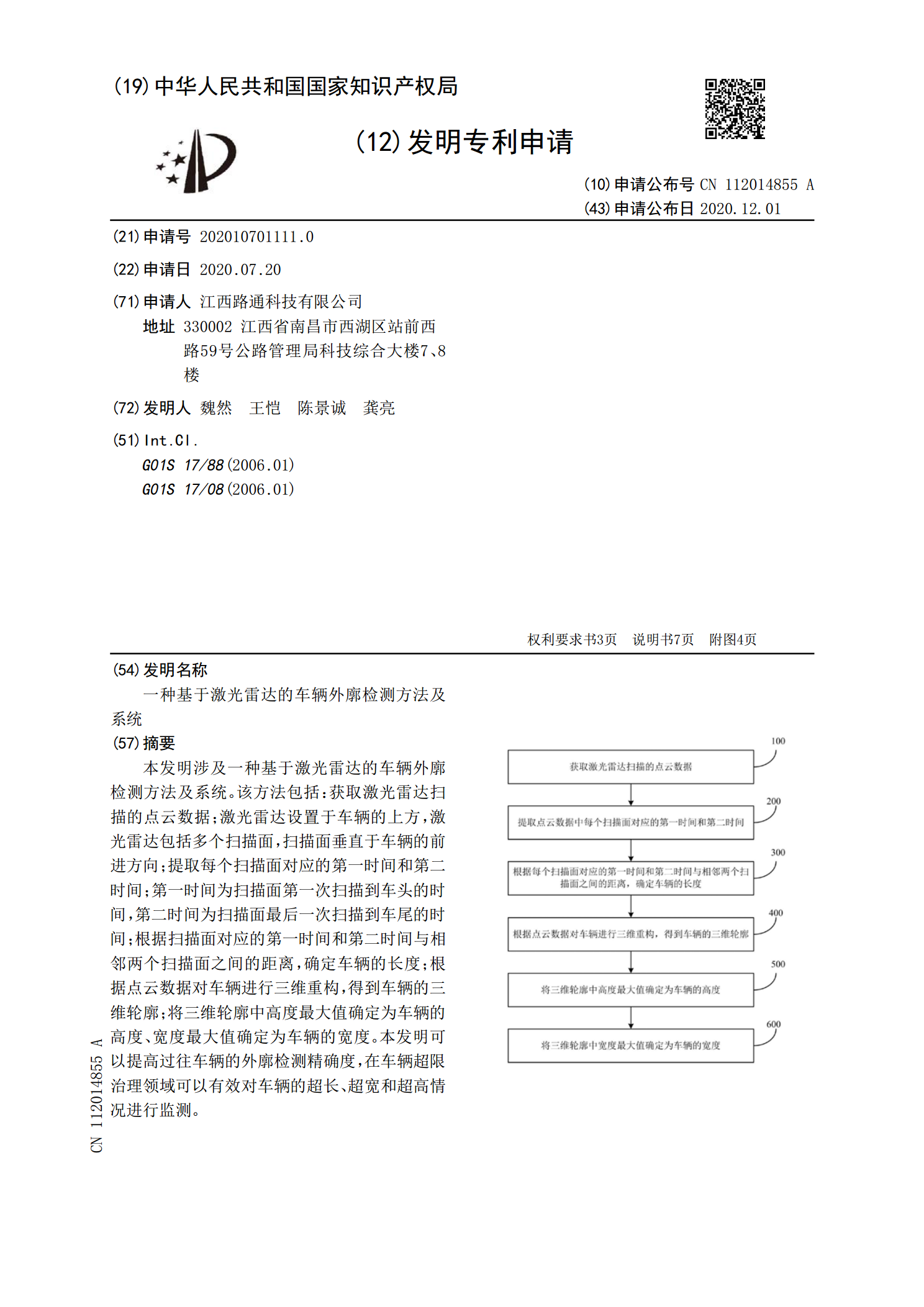
本发明涉及一种基于激光雷达的车辆外廓检测方法及系统。该方法包括:获取激光雷达扫描的点云数据;激光雷达设置于车辆的上方,激光雷达包括多个扫描面,扫描面垂直于车辆的前进方向;提取每个扫描面对应的第一时间和第二时间;第一时间为扫描面第一次扫描到车头的时间,第二时间为扫描面最后一次扫描到车尾的时间;根据扫描面对应的第一时间和第二时间与相邻两个扫描面之间的距离,确定车辆的长度;根据点云数据对车辆进行三维重构,得到车辆的三维轮廓;将三维轮廓中高度最大值确定为车辆的高度、宽度最大值确定为车辆的宽度。本发明可以提高过往车
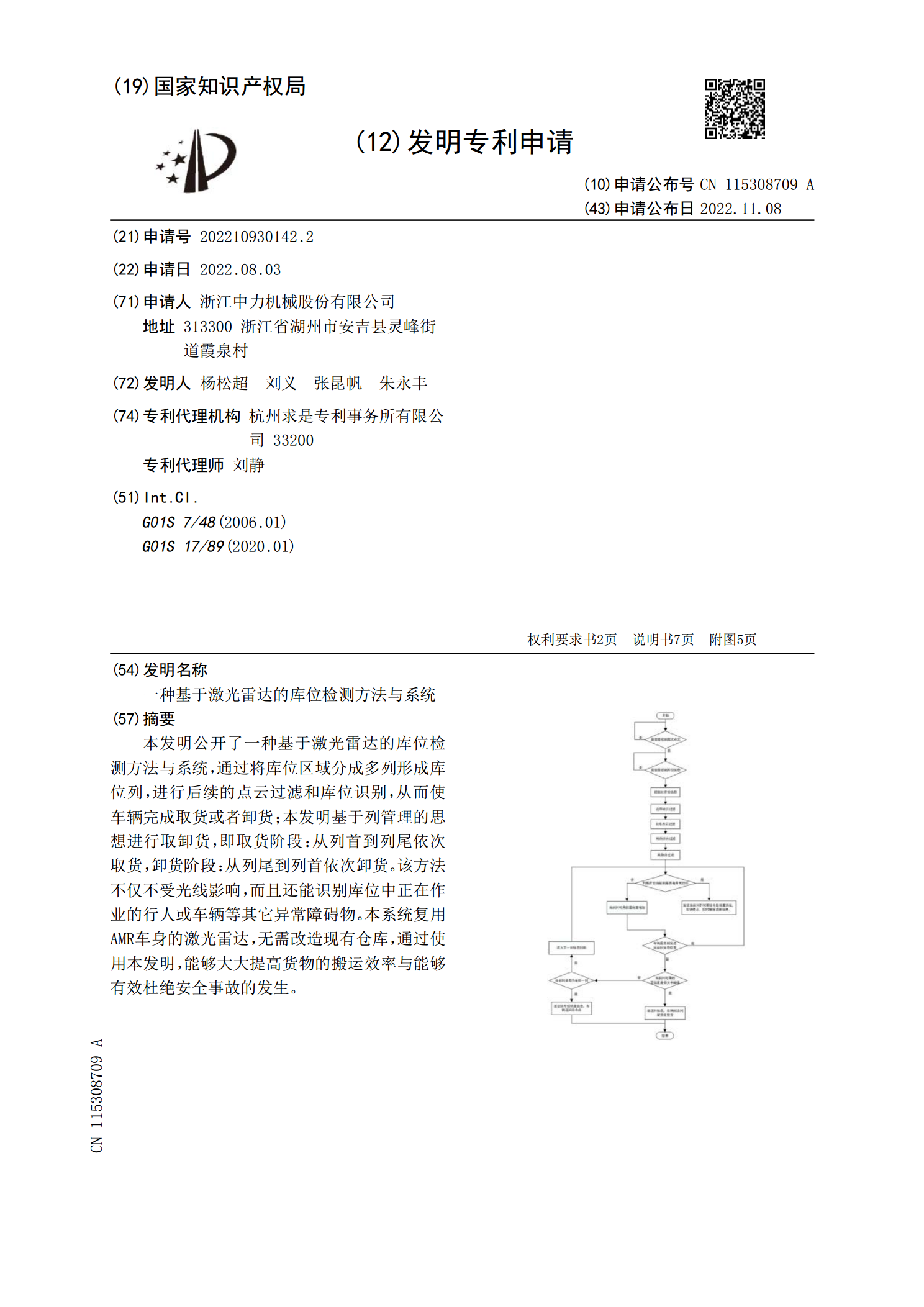
一种基于激光雷达的库位检测方法与系统.pdf
本发明公开了一种基于激光雷达的库位检测方法与系统,通过将库位区域分成多列形成库位列,进行后续的点云过滤和库位识别,从而使车辆完成取货或者卸货;本发明基于列管理的思想进行取卸货,即取货阶段:从列首到列尾依次取货,卸货阶段:从列尾到列首依次卸货。该方法不仅不受光线影响,而且还能识别库位中正在作业的行人或车辆等其它异常障碍物。本系统复用AMR车身的激光雷达,无需改造现有仓库,通过使用本发明,能够大大提高货物的搬运效率与能够有效杜绝安全事故的发生。

光外差检测系统.ppt
那么,入射到检测器上的总光场为:如果把信号的测量限制在差频的通常范围内,则可以得到通过以ωC为中心频率的带通滤波器的瞬时中频电流为:6.2光外差检测特性6.2.4信噪比损失小6.2.5最小可检测功率—内增益型光电检测器件引入最小可检测功率(等效噪声功率)NEP表示,在量子检测极限下,光外差检测的NEP值为:6.2.6光外差检测系统对检测器性能的要求6.3影响光外差检测灵敏度的因素设信号光束和本振光束之间夹角为θ,且信号光束的波阵面平行于光敏面时,如图。则整个光敏面总响应电流为6.3.2光外差检测的频率条件

一种基于激光雷达的船舶靠泊检测系统和方法.pdf
本发明提供了一种基于激光雷达的船舶靠泊检测系统和方法,包括点云数据采集子系统和数据处理子系统,点云数据采集子系统包括三维点云数据采集模块,三维点云数据采集模块为多线激光雷达,多线激光雷达实现码头点云数据的采集功能;数据处理子系统包括数据处理模块、数据存储模块和数据传输模块,数据处理子系统由工控机或者嵌入式设备来实现数据处理、数据存储和数据传输功能。本发明通过点云数据采集子系统采集码头数据,经过数据处理子系统处理,通过有线或者无线的方式将三维点云信息、码头的轮廓信息、船舶到码头的距离和角度以及计算得出的预警