
一种面向动态泊车环境的同时定位及混合地图构建方法.pdf

一只****懿呀

1/10
2/10
3/10

4/10
5/10
6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种面向动态泊车环境的同时定位及混合地图构建方法.pdf
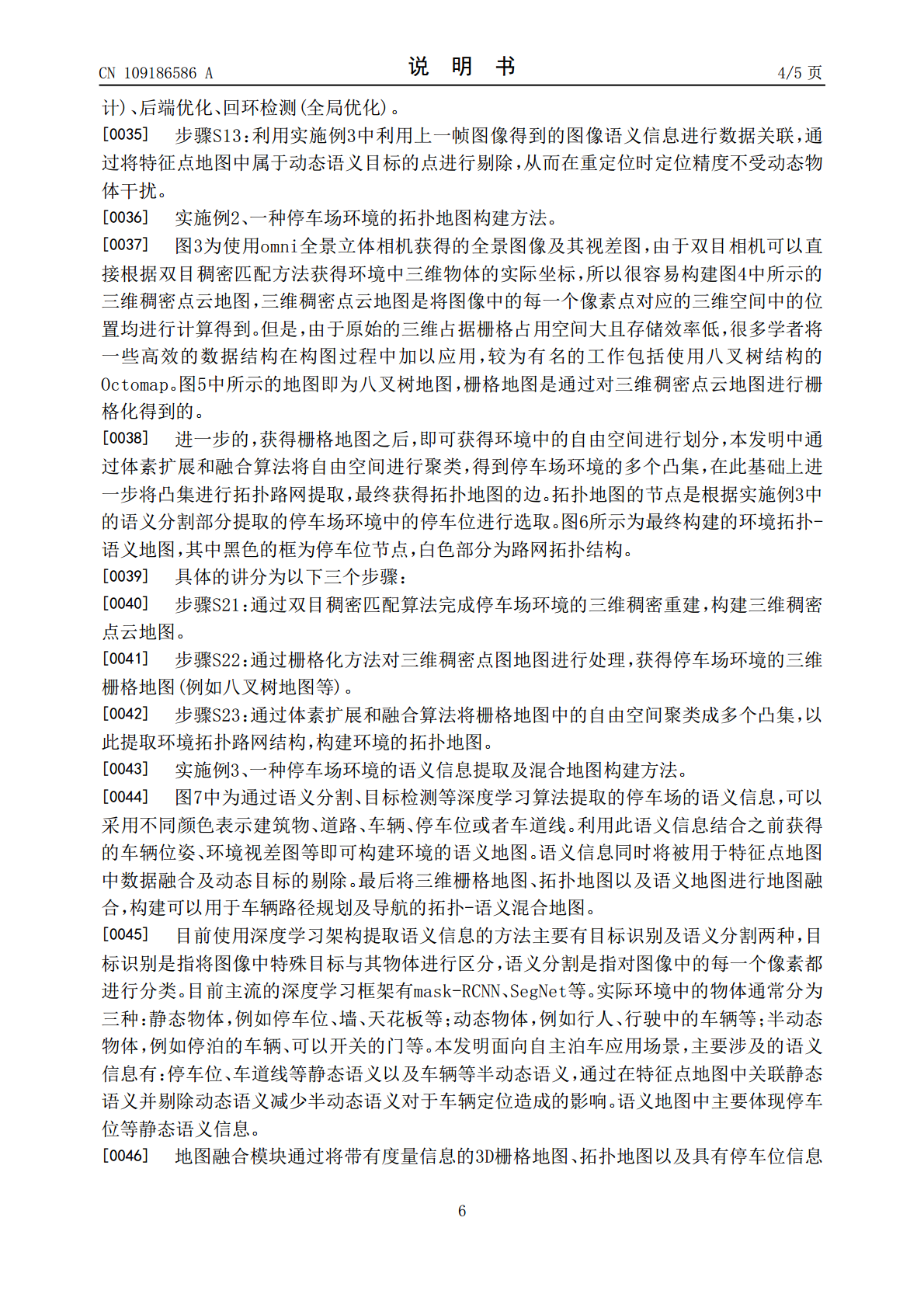
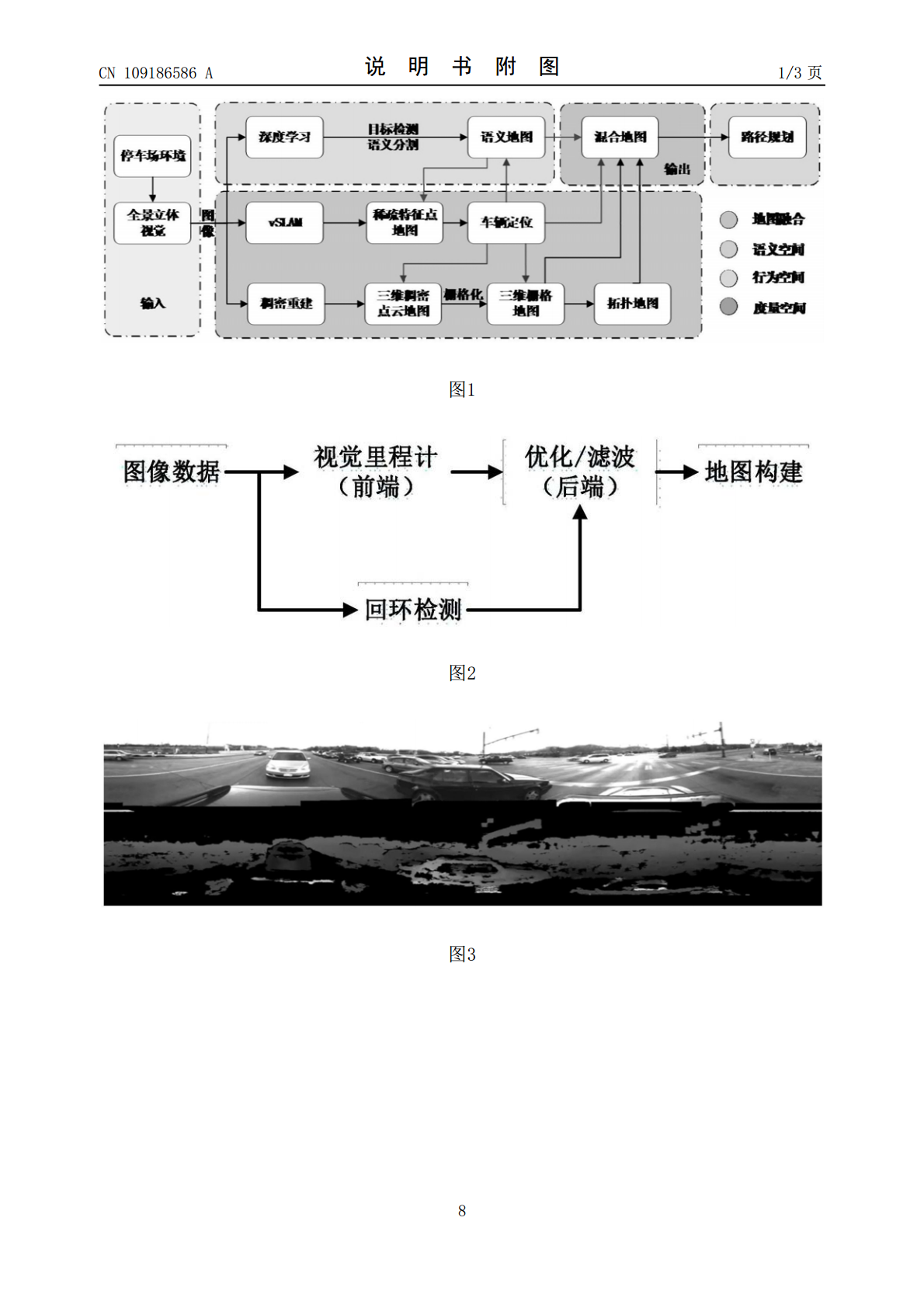
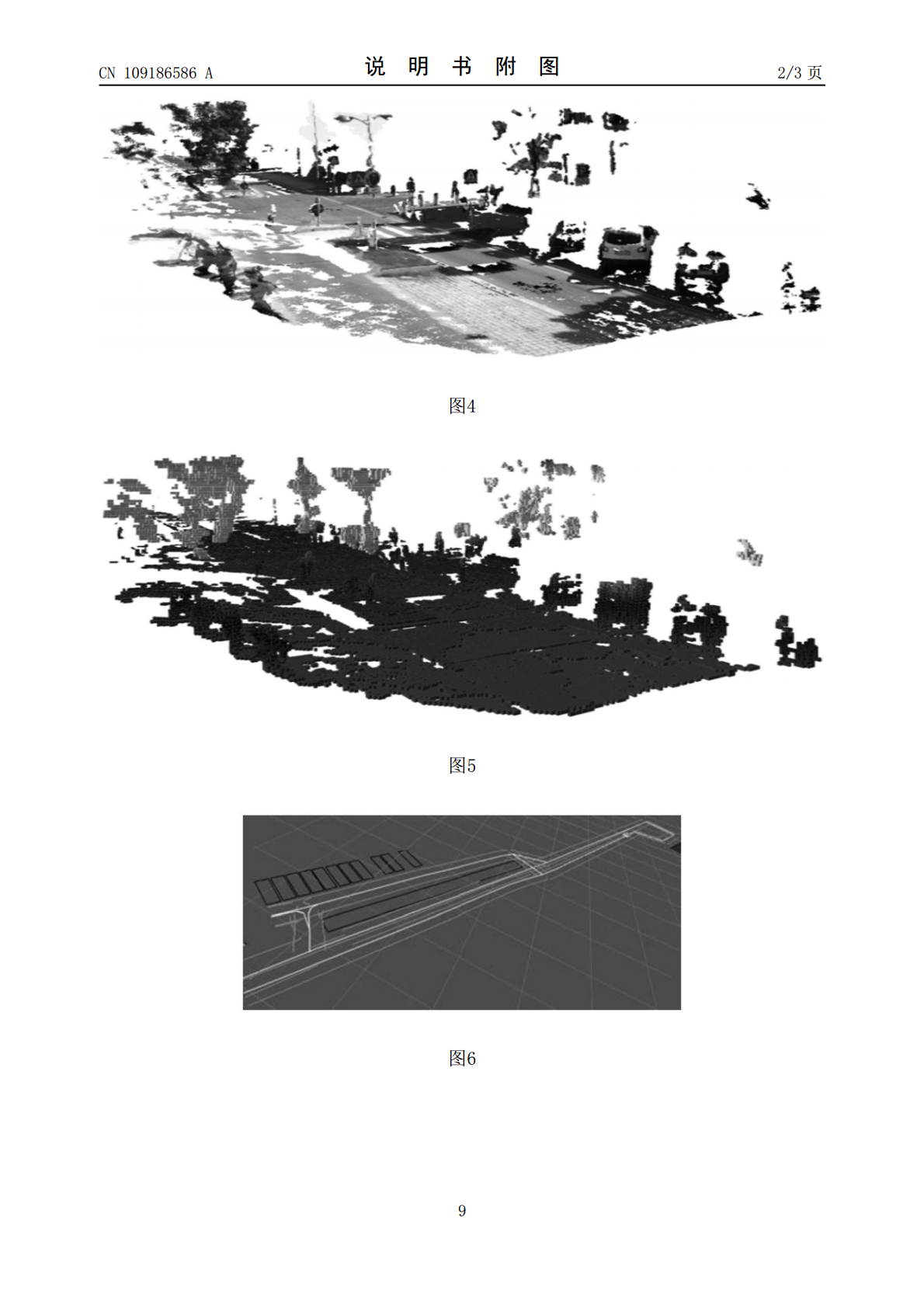
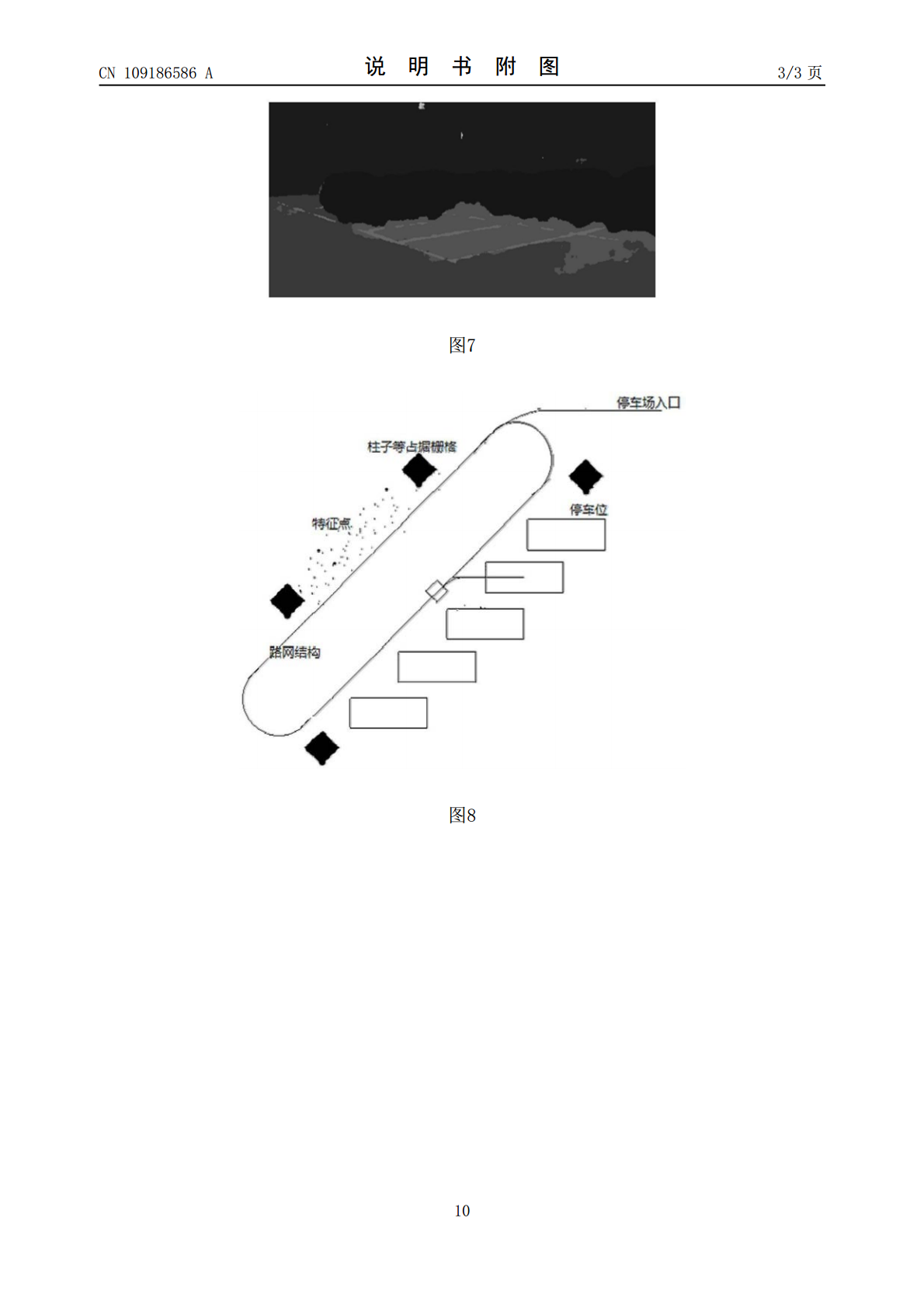
本发明公开了一种面向动态泊车环境的同时定位及混合地图构建方法,通过引入环境的语义信息进行数据关联,将用于定位的特征点地图中的动态目标进行剔除,同时在定位时引入停车位等静态语义信息,从而提高在动态环境下的定位精度;使用全景立体视觉平台作为系统唯一环境感知来源,结合全景相机及视觉的优点,不经具有环境准确的尺度信息,同时由于视野广,特征点在地图中停留时间长,因此可以提高定位精度;可以将停车位等语义信息与环境中的拓扑路网结构进行融合,可以有效提高路径规划的效率,从而进一步提高自主泊车系统的实时性。

面向动态场景的同时定位与地图创建.docx
面向动态场景的同时定位与地图创建面向动态场景的同时定位与地图创建摘要:随着无人驾驶、机器人和增强现实等技术的发展,实时、精准的定位和地图创建对于许多应用场景变得越来越重要。然而,动态环境中的同时定位和地图创建是一个具有挑战性的问题。本论文主要探讨面向动态场景的同时定位和地图创建的方法和技术,并讨论其应用和挑战。1.引言随着无人驾驶车辆、自动导航机器人和增强现实等应用的兴起,实时、精准的定位和地图创建成为了一个关键的技术要求。传统的定位和地图创建方法多适用于静态或低动态场景,无法应对动态场景中的多种复杂情况

一种动态环境下的同时定位与三维地图构建方法.pdf
本发明公开了一种动态环境下的同时定位与三维地图构建方法,包括以下步骤:S1、根据语义信息对从标记为动态的对象中提取的特征点进行过滤;S2、将其余特征点与前一帧匹配,使用匹配的特征点对计算稳定的基础矩阵;S3、通过几何约束过滤出所有真实的动态特征点对,保留静态特征点对。相比于传统方法根据语义信息直接剔除先验动态特征点,本发明通过采用动态特征过滤策略,结合语义信息和几何约束关系共同检测处于运动状态的目标物体,滤除当前帧各运动目标的特征点,能够有效提高在动态环境下的定位精度和稳定性,从而使机器人充分的感知外界周

面向室内动态环境的机器人定位与地图构建.docx
面向室内动态环境的机器人定位与地图构建摘要:机器人定位与地图构建是机器人领域中的重要研究方向之一,而面向室内动态环境的机器人定位与地图构建更是其中的难点和研究热点。本文基于室内动态环境下机器人定位与地图构建的特点和难点,系统地分析了该领域研究的现状和进展,梳理了机器人定位与地图构建的基本方法和技术,针对室内动态环境下的机器人定位与地图构建问题,介绍了SLAM算法、多传感器融合定位和动态环境建模等技术,并结合实例进行了详细阐述和分析。关键词:机器人定位、地图构建、室内动态环境、SLAM算法、多传感器融合定位

用于同时定位与地图构建的方法.pdf
本发明涉及一种同时定位与地图构建的方法,该方法用于对可以自行移动的设备,尤其是可以自行移动的地面灰尘收集设备进行自动定位,该设备优选带有电机驱动的若干移动轮,其中,该设备具有由光学发射和接收单元组成的障碍识别装置,其中,从该设备的预先计算出的假定第一位置出发进一步计算多个可能的位置和定向(质点6)并在该设备的相应移动后根据这时占据的第二位置,借助光学单元的测量结果将此前产生的质点之一按照预先规定的考虑概率的选择算法假定为该设备的新位置。为进一步改进所述类型的方法,建议在由该设备的预先规定的移动方向和移动距