
基于深度学习的龙虾在线定位视觉检测方法和系统.pdf

书錦****by

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于深度学习的龙虾在线定位视觉检测方法和系统.pdf
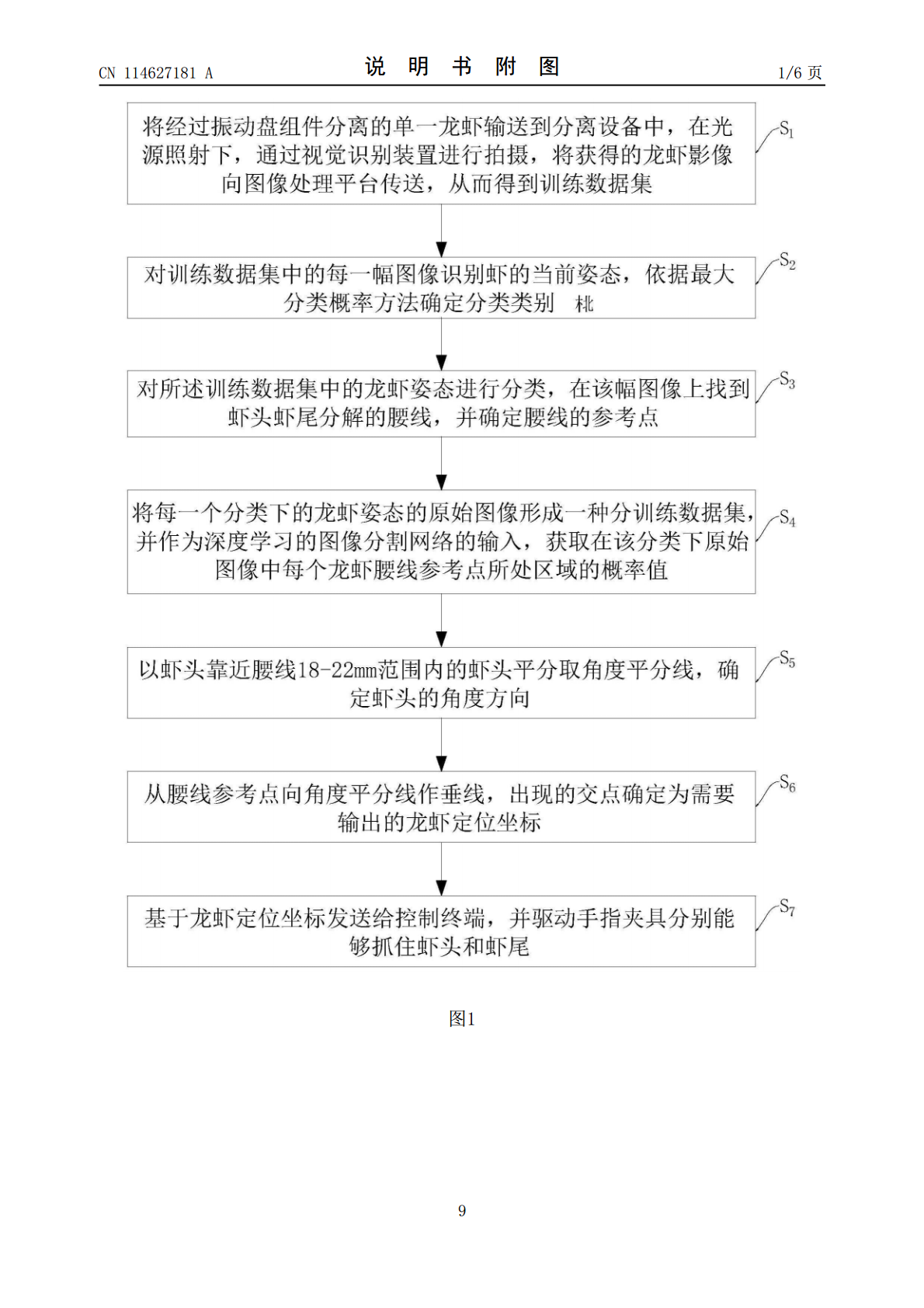
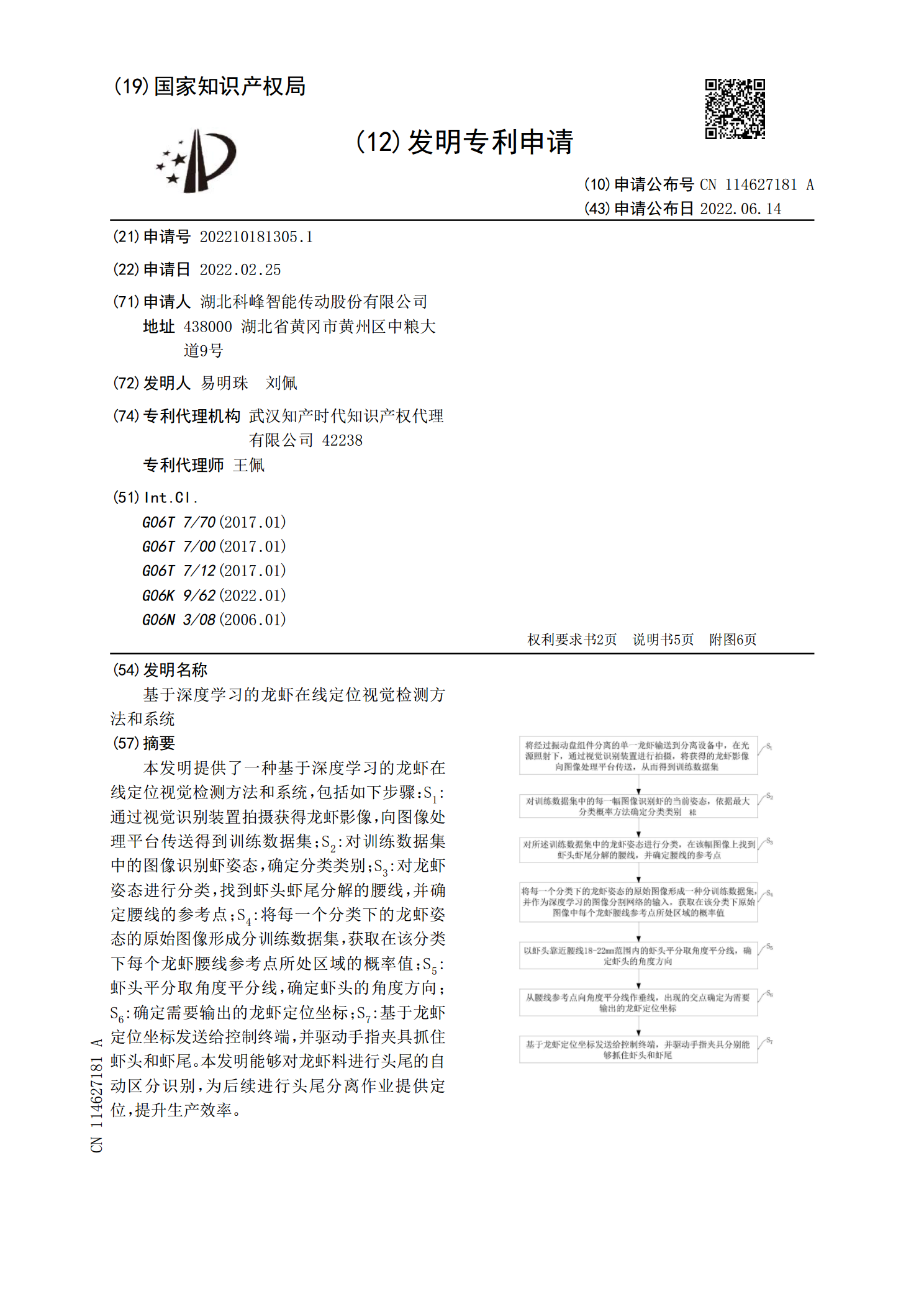
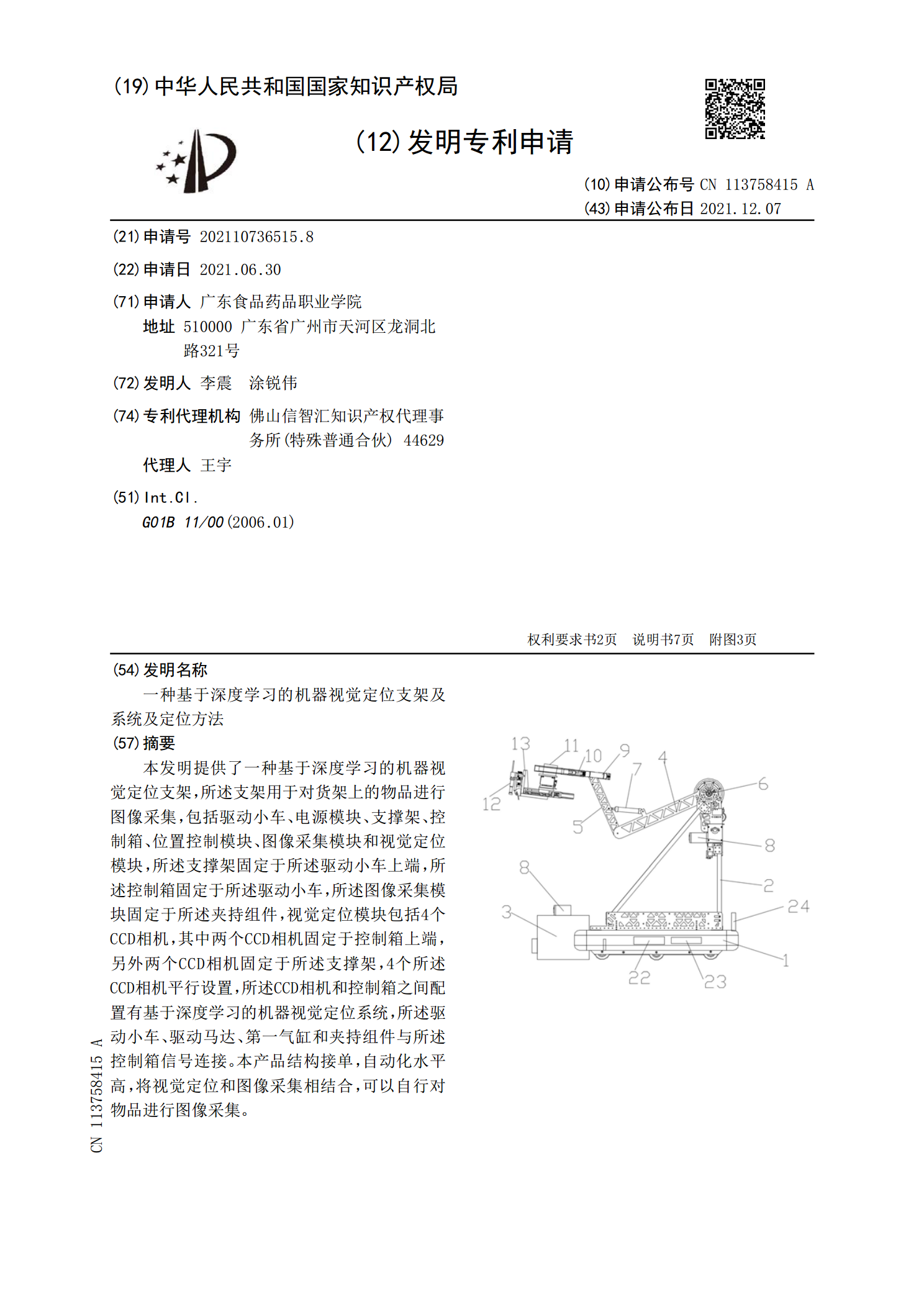
本发明提供了一种基于深度学习的龙虾在线定位视觉检测方法和系统,包括如下步骤:S<base:Sub>1</base:Sub>:通过视觉识别装置拍摄获得龙虾影像,向图像处理平台传送得到训练数据集;S<base:Sub>2</base:Sub>:对训练数据集中的图像识别虾姿态,确定分类类别;S<base:Sub>3</base:Sub>:对龙虾姿态进行分类,找到虾头虾尾分解的腰线,并确定腰线的参考点;S<base:Sub>4</base:Sub>:将每一个分类下的龙虾姿态的原始图像形成分训练数据集,获取在该分类
一种基于深度学习的机器视觉定位支架及系统及定位方法.pdf
本发明提供了一种基于深度学习的机器视觉定位支架,所述支架用于对货架上的物品进行图像采集,包括驱动小车、电源模块、支撑架、控制箱、位置控制模块、图像采集模块和视觉定位模块,所述支撑架固定于所述驱动小车上端,所述控制箱固定于所述驱动小车,所述图像采集模块固定于所述夹持组件,视觉定位模块包括4个CCD相机,其中两个CCD相机固定于控制箱上端,另外两个CCD相机固定于所述支撑架,4个所述CCD相机平行设置,所述CCD相机和控制箱之间配置有基于深度学习的机器视觉定位系统,所述驱动小车、驱动马达、第一气缸和夹持组件与
基于机器视觉的篾片缺陷在线检测系统及检测方法.pdf
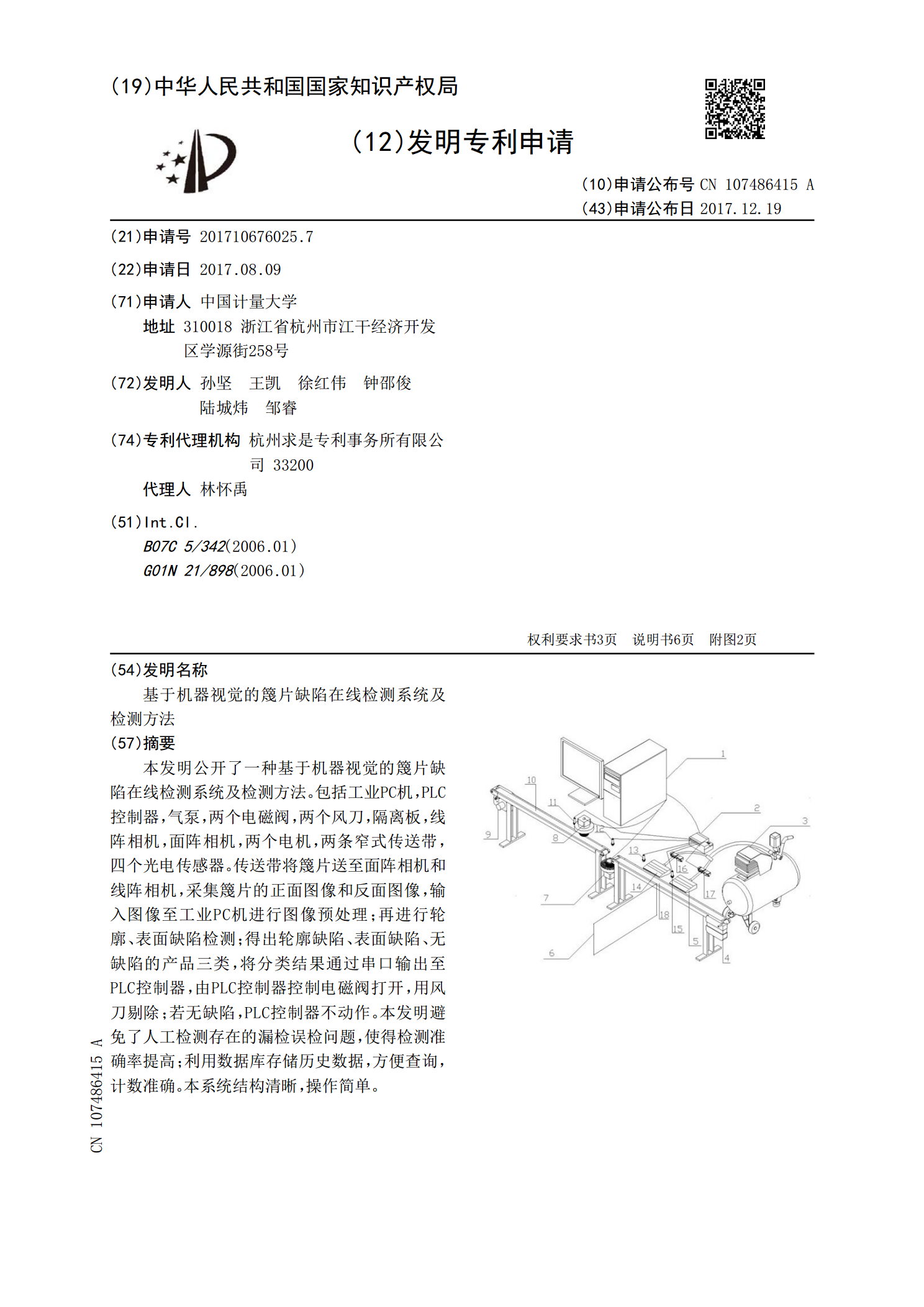
本发明公开了一种基于机器视觉的篾片缺陷在线检测系统及检测方法。包括工业PC机,PLC控制器,气泵,两个电磁阀,两个风刀,隔离板,线阵相机,面阵相机,两个电机,两条窄式传送带,四个光电传感器。传送带将篾片送至面阵相机和线阵相机,采集篾片的正面图像和反面图像,输入图像至工业PC机进行图像预处理;再进行轮廓、表面缺陷检测;得出轮廓缺陷、表面缺陷、无缺陷的产品三类,将分类结果通过串口输出至PLC控制器,由PLC控制器控制电磁阀打开,用风刀剔除;若无缺陷,PLC控制器不动作。本发明避免了人工检测存在的漏检误检问题,
基于深度学习的单株水稻检测定位方法、系统、设备及介质.pdf
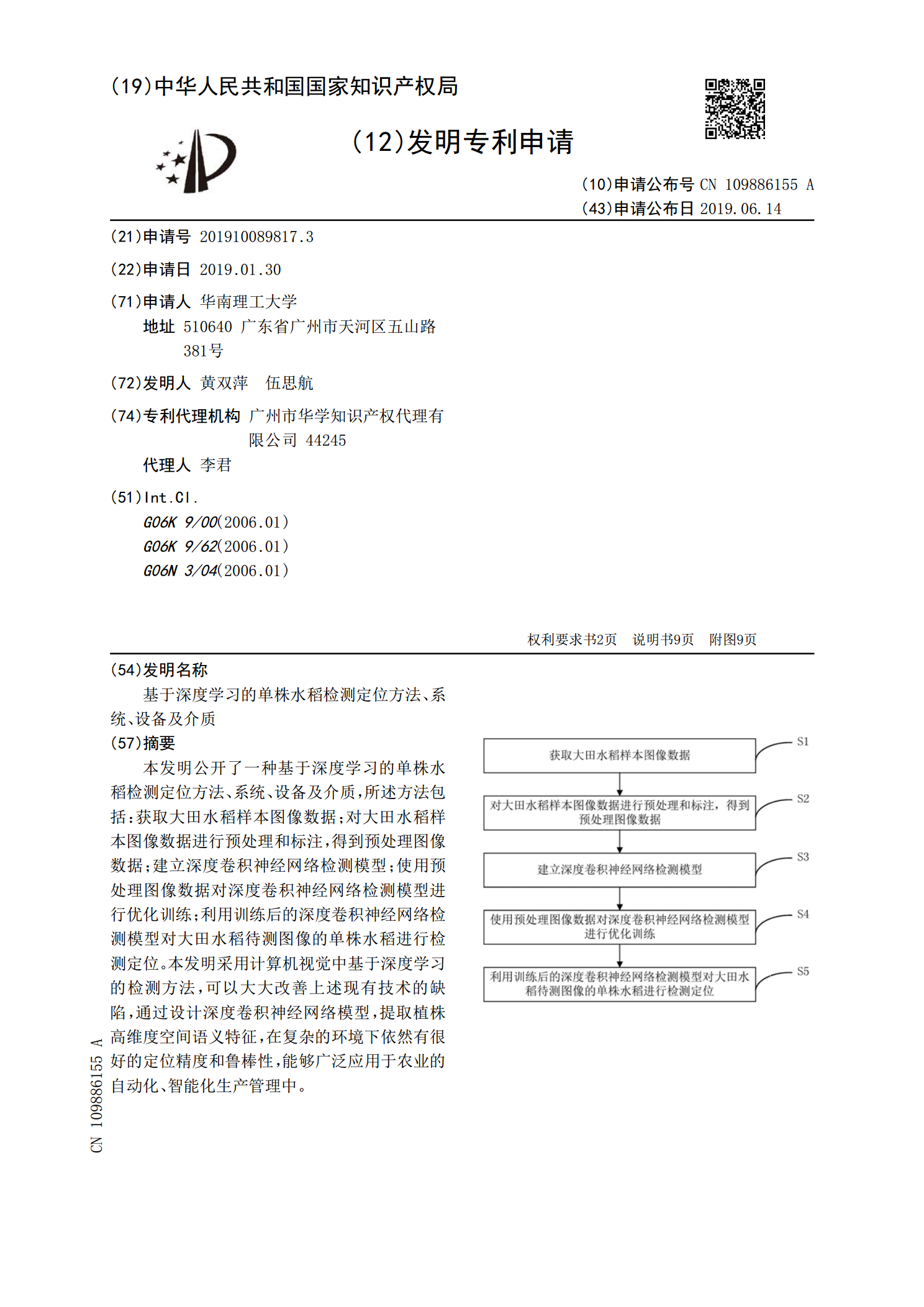
本发明公开了一种基于深度学习的单株水稻检测定位方法、系统、设备及介质,所述方法包括:获取大田水稻样本图像数据;对大田水稻样本图像数据进行预处理和标注,得到预处理图像数据;建立深度卷积神经网络检测模型;使用预处理图像数据对深度卷积神经网络检测模型进行优化训练;利用训练后的深度卷积神经网络检测模型对大田水稻待测图像的单株水稻进行检测定位。本发明采用计算机视觉中基于深度学习的检测方法,可以大大改善上述现有技术的缺陷,通过设计深度卷积神经网络模型,提取植株高维度空间语义特征,在复杂的环境下依然有很好的定位精度和鲁
基于计算机视觉和深度学习的茶蓬深度分布检测方法.pdf
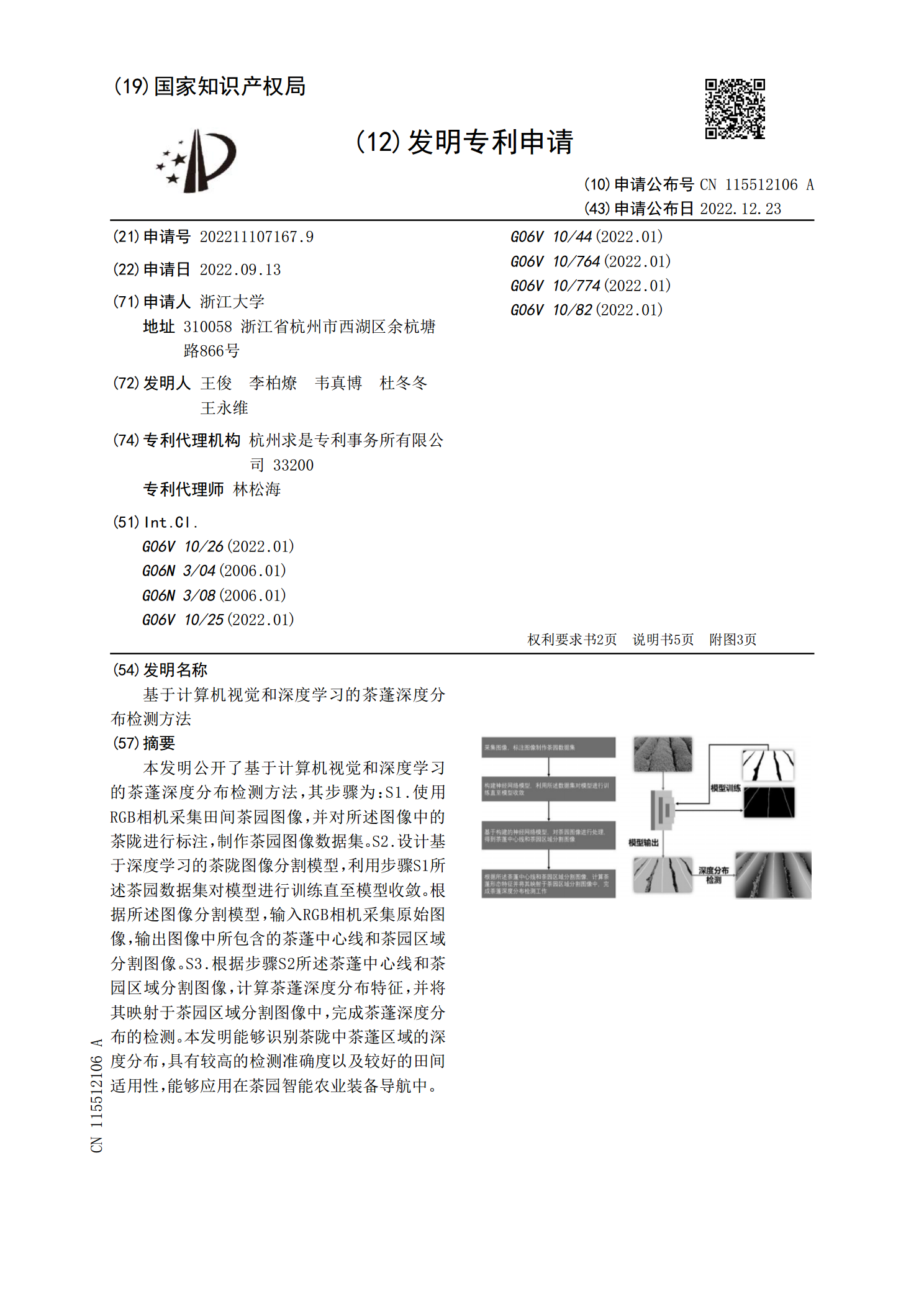
本发明公开了基于计算机视觉和深度学习的茶蓬深度分布检测方法,其步骤为:S1.使用RGB相机采集田间茶园图像,并对所述图像中的茶陇进行标注,制作茶园图像数据集。S2.设计基于深度学习的茶陇图像分割模型,利用步骤S1所述茶园数据集对模型进行训练直至模型收敛。根据所述图像分割模型,输入RGB相机采集原始图像,输出图像中所包含的茶蓬中心线和茶园区域分割图像。S3.根据步骤S2所述茶蓬中心线和茶园区域分割图像,计算茶蓬深度分布特征,并将其映射于茶园区域分割图像中,完成茶蓬深度分布的检测。本发明能够识别茶陇中茶蓬区域