
一种工业仓管机器人及其工作方法.pdf

雅云****彩妍

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种工业仓管机器人及其工作方法.pdf
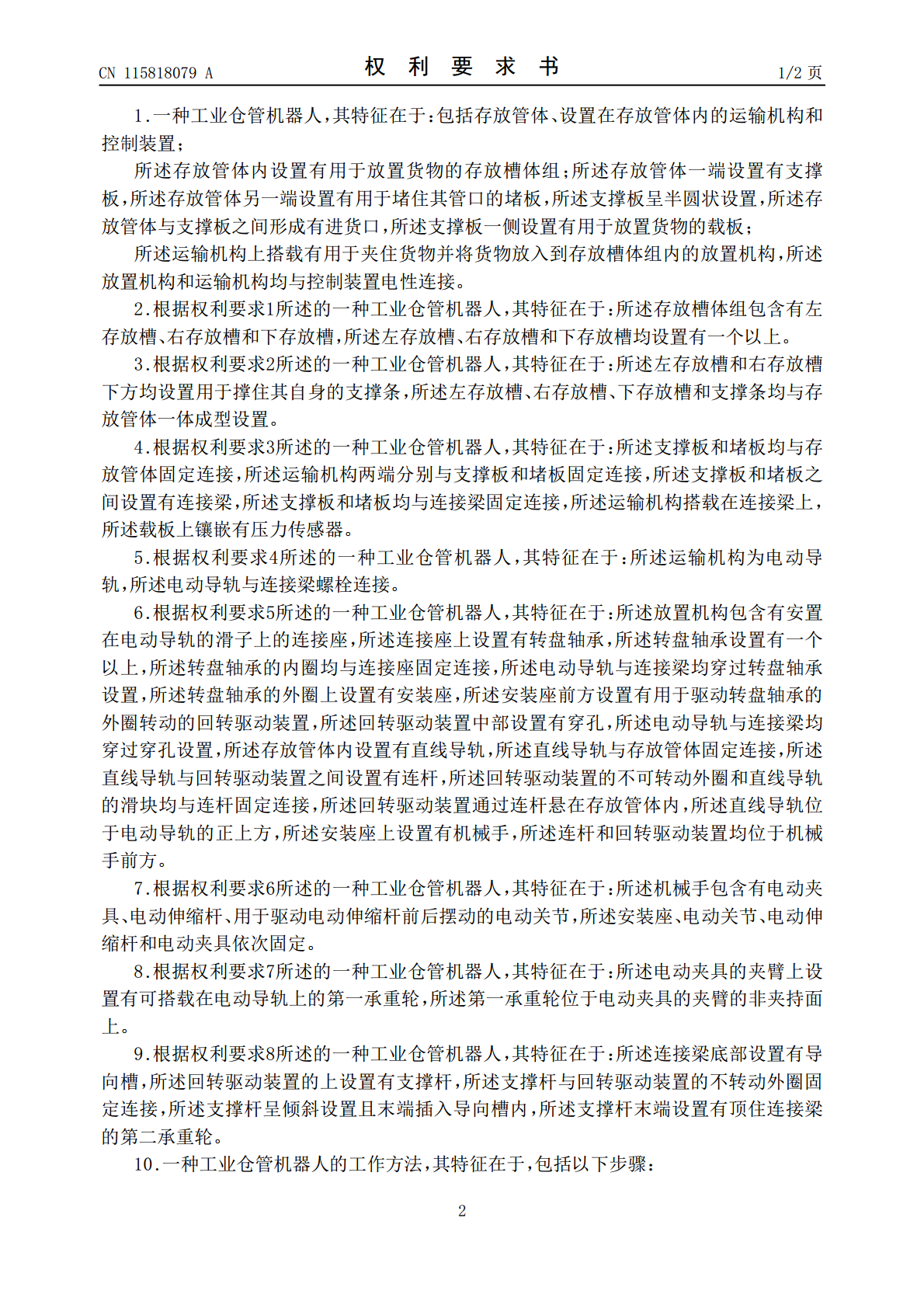
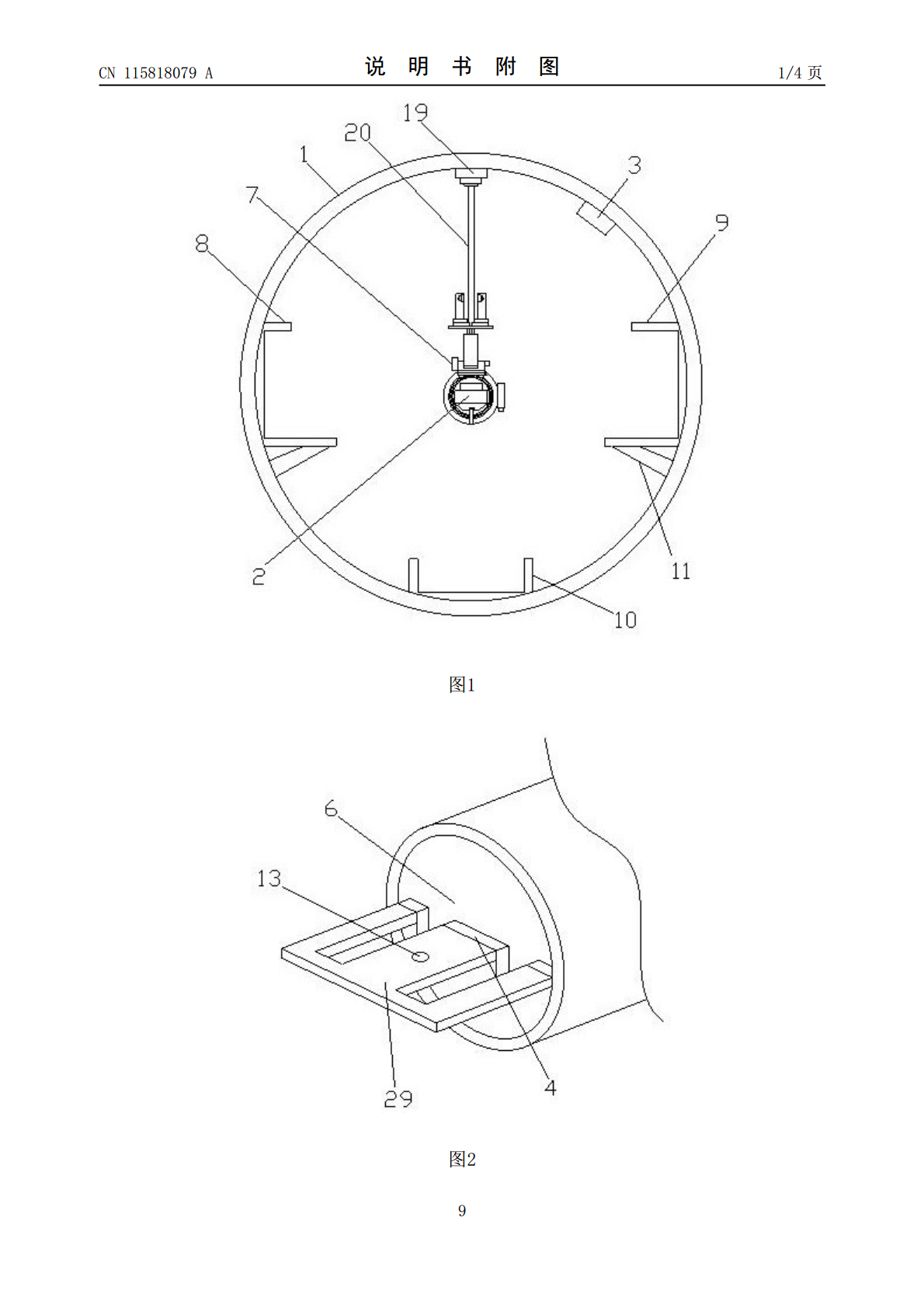
本发明公开一种工业仓管机器人及其工作方法,包括存放管体、设置在存放管体内的运输机构和控制装置;所述存放管体内设置有用于放置货物的存放槽体组;所述存放管体一端设置有支撑板,所述存放管体另一端设置有用于堵住其管口的堵板,所述支撑板呈半圆状设置,所述存放管体与支撑板之间形成有进货口,所述支撑板一侧设置有用于放置货物的载板;所述运输机构上搭载有用于夹住货物并将货物放入到存放槽体组内的放置机构,所述放置机构和运输机构均与控制装置电性连接;该工业仓管机器人搬运效率高且具备分类存放能力。

一种工业机器人的导向装置及其工作方法.pdf
本发明公开一种工业机器人的导向装置及其工作方法,包括直线导轨体、拐弯导轨体以及沿着直线导轨体和拐弯导轨体运动的运送装置,所述直线导轨体和拐弯导轨体上均设置有导槽,所述运送装置包含有双轴电机和机箱,所述机箱插入导槽内,所述机箱上面设置有顶板,所述机箱下面设置有底板,所述双轴电机上设置有驱动轮,所述顶板底面设置有第一滚针排,所述机箱内设置有控制器和蓄电池,所述双轴电机前端设置有红外线接收管,所述导槽内设置有与红外线接收管相配对的红外线发射管,所述直线导轨体和拐弯导轨体上均设置有用于与墙面连接的连接架,所述底板
一种秸秆闪爆仓及其工作方法.pdf
本发明公开了一种秸秆闪爆仓,包括外胆和内胆;所述内胆顶部开口,与外胆的下端嵌套伸缩配合;所述内胆侧面设置有出料口;述外胆周围设置有蒸汽管;所述蒸汽管与内胆内部连通;所述外胆顶部设置有开口,其上对应设置有填料装置;所述出料口处对应连通设置有中转腔;通过填料装置的伸缩,有效提高单次爆破的秸秆处理量,进而提高闪爆仓的工作效率;通过中转腔将闪爆仓内产生的混合物分为两股并使之相互撞击,从而有效抵消掉冲击力;通过转动件与移动块的配合,实现了对内胆快速可靠的位置锁定;通过移动块上的支撑滑轮避免了解锁瞬间移动块与内胆底部
一种防堵料仓及其工作方法.pdf
本发明公开了一种防堵料仓及其工作方法,包括外筒体、分仓出口段、流化介质通道以料仓出口段,其中,外筒体内设置有若干分仓隔板,外筒体内通过各分仓隔板分隔为若干分仓,其中,各分仓沿周向依次布置,各分仓的底部出口与分仓出口段的顶部入口相连通,分仓出口段的底部出口与料仓出口段的顶部入口相连通,流化介质通道与分仓出口段侧面的流化介质入口相连通,该料仓及其工作方法能够有效料仓堵煤的问题。

一种机器人及其工作方法.pdf
本发明涉及一种机器人及其工作方法,包括底座、支撑装置、Stewart并联机构、插纸装置和固定装置;所述的底座呈T型板状结构,支撑装置位于底座后侧端,且支撑装置与底座之间固连,Stewart并联机构安装在支撑装置前端,插纸装置位于Stewart并联机构正下方,固定装置数量为四,固定装置分别对称布置在底座上端面上,且固定装置与底座之间固连。本发明可对电动机定子进行绝缘纸双向同步插纸作业,且整个插纸过程均是机械自动化作业,插纸快速方便且安全性高,插纸深度一致性高,减少了劳动力的投入,降低了电动机生产的成本,且一