
目标检测方法、装置、电子设备及存储介质.pdf

阳炎****找我

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
目标检测方法、装置、电子设备、存储介质.pdf
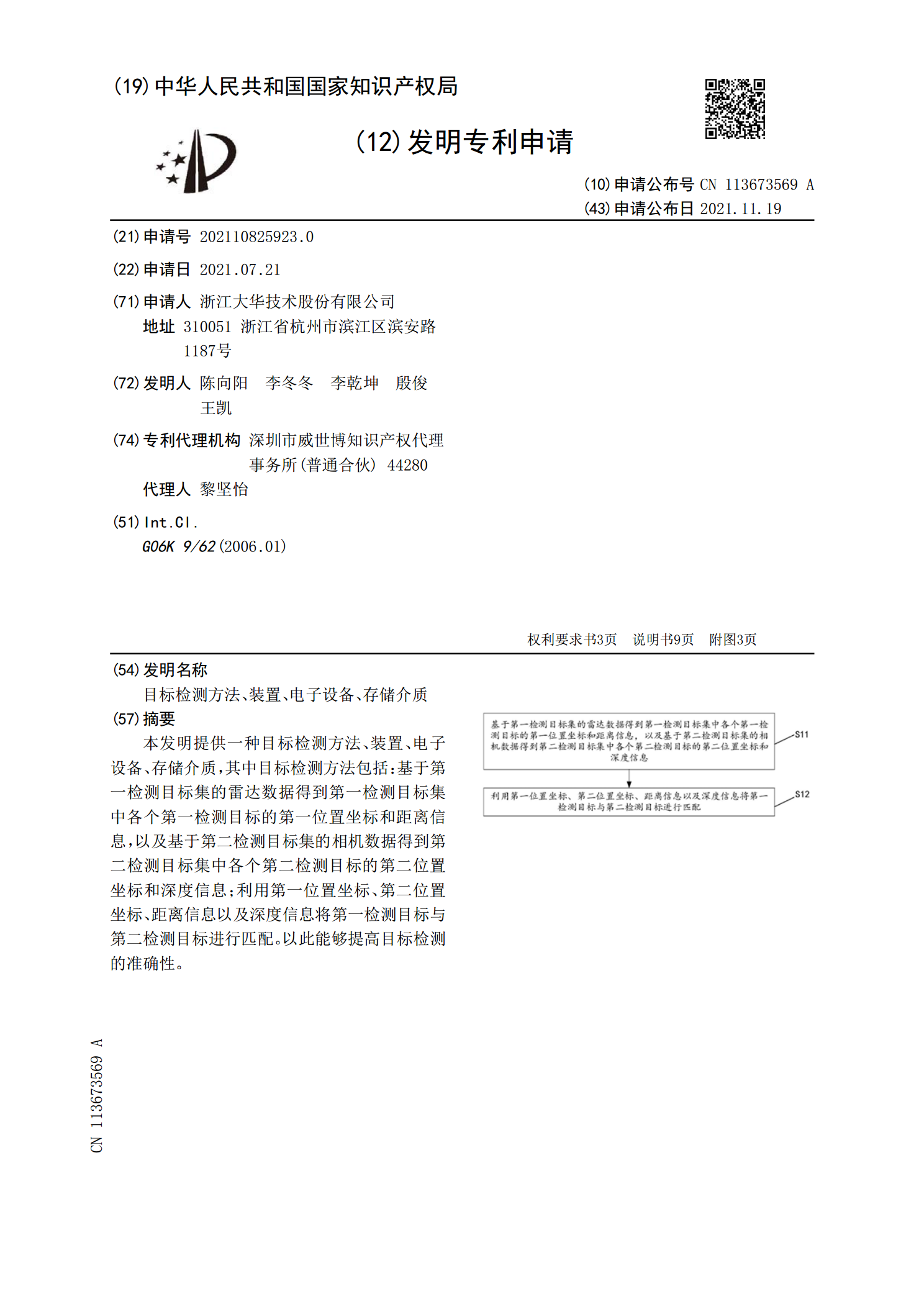
本发明提供一种目标检测方法、装置、电子设备、存储介质,其中目标检测方法包括:基于第一检测目标集的雷达数据得到第一检测目标集中各个第一检测目标的第一位置坐标和距离信息,以及基于第二检测目标集的相机数据得到第二检测目标集中各个第二检测目标的第二位置坐标和深度信息;利用第一位置坐标、第二位置坐标、距离信息以及深度信息将第一检测目标与第二检测目标进行匹配。以此能够提高目标检测的准确性。
目标检测方法、装置、电子设备及存储介质.pdf
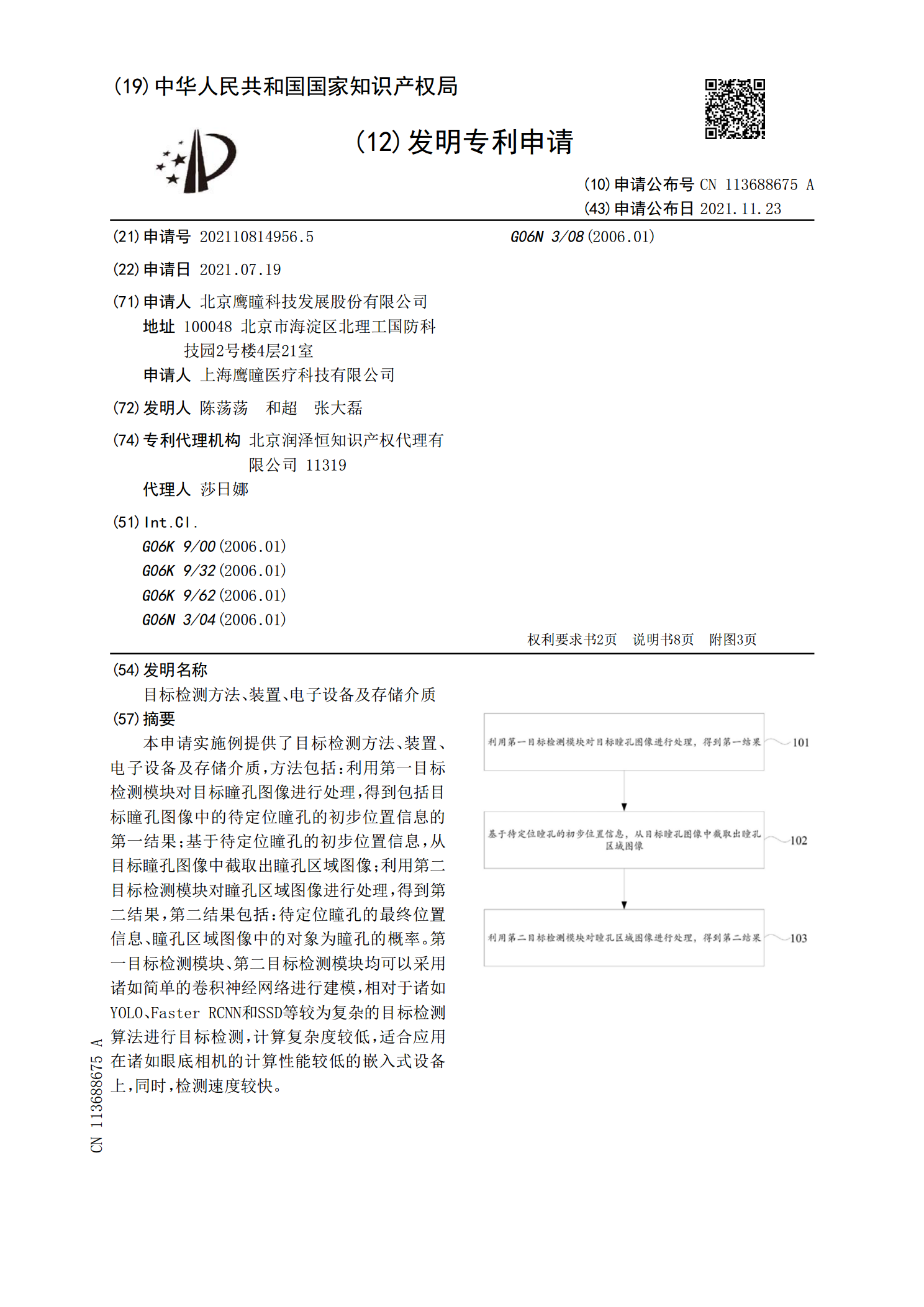
本申请实施例提供了目标检测方法、装置、电子设备及存储介质,方法包括:利用第一目标检测模块对目标瞳孔图像进行处理,得到包括目标瞳孔图像中的待定位瞳孔的初步位置信息的第一结果;基于待定位瞳孔的初步位置信息,从目标瞳孔图像中截取出瞳孔区域图像;利用第二目标检测模块对瞳孔区域图像进行处理,得到第二结果,第二结果包括:待定位瞳孔的最终位置信息、瞳孔区域图像中的对象为瞳孔的概率。第一目标检测模块、第二目标检测模块均可以采用诸如简单的卷积神经网络进行建模,相对于诸如YOLO、FasterRCNN和SSD等较为复杂的目
目标检测方法、装置、电子设备及存储介质.pdf
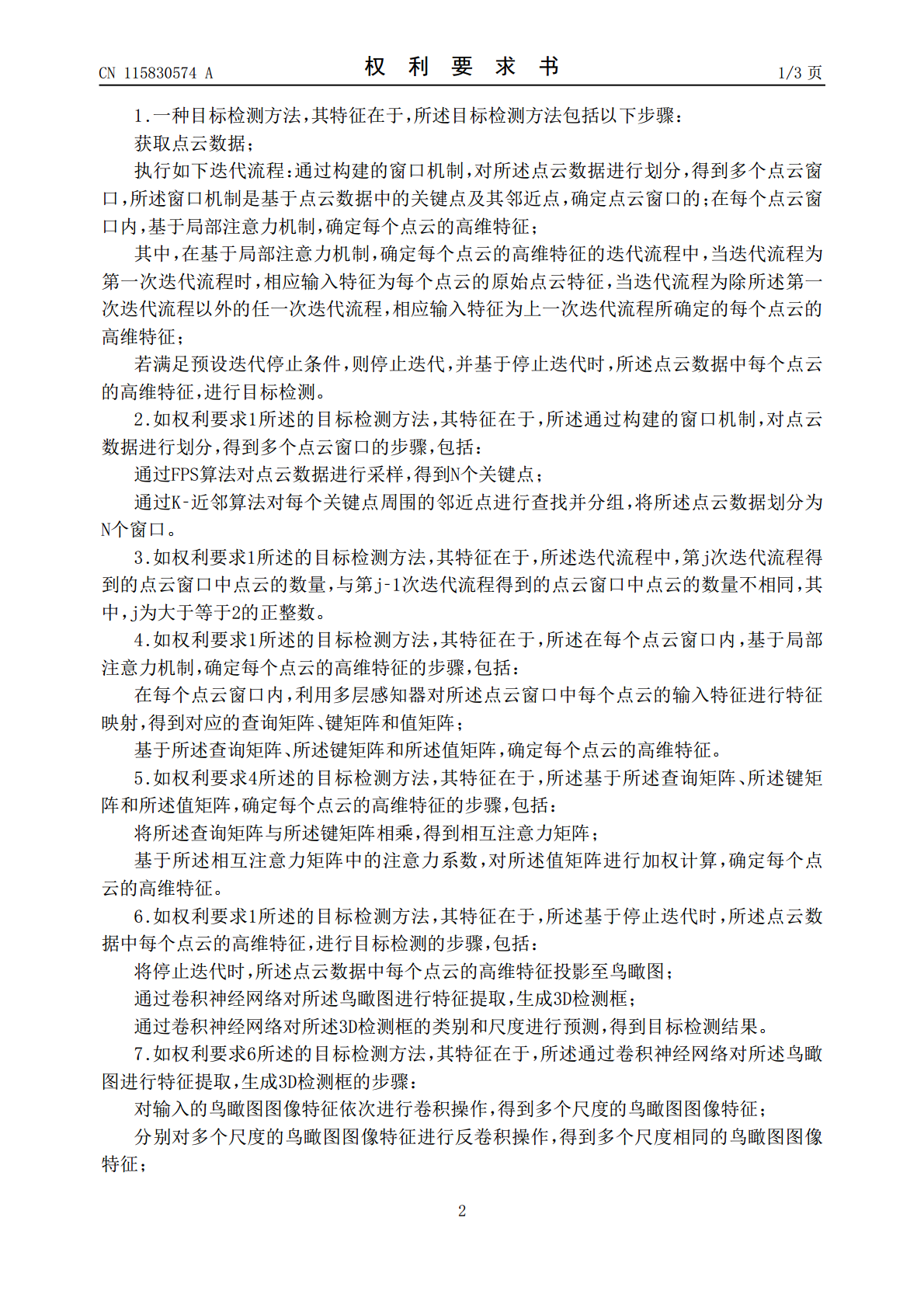
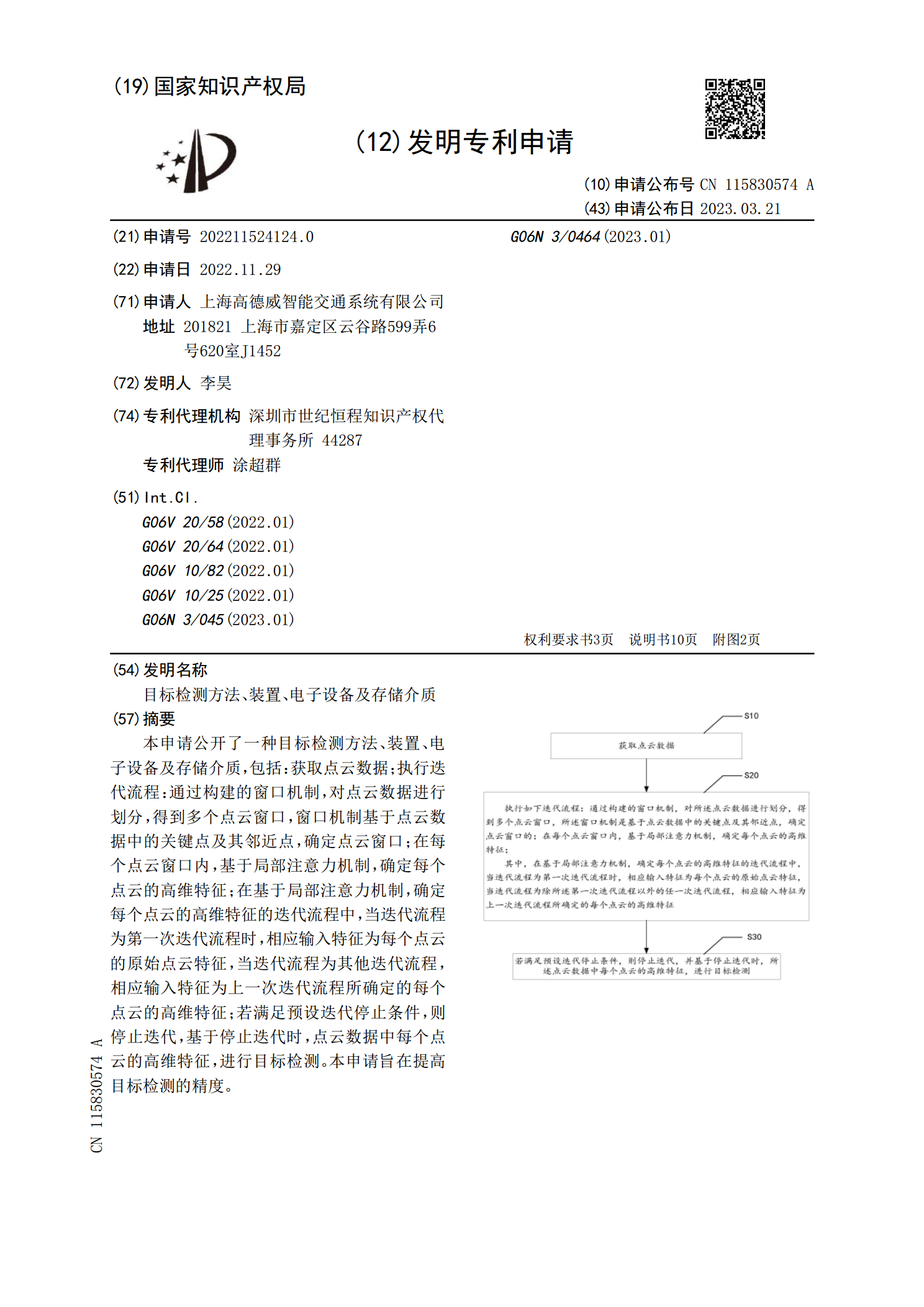
本申请公开了一种目标检测方法、装置、电子设备及存储介质,包括:获取点云数据;执行迭代流程:通过构建的窗口机制,对点云数据进行划分,得到多个点云窗口,窗口机制基于点云数据中的关键点及其邻近点,确定点云窗口;在每个点云窗口内,基于局部注意力机制,确定每个点云的高维特征;在基于局部注意力机制,确定每个点云的高维特征的迭代流程中,当迭代流程为第一次迭代流程时,相应输入特征为每个点云的原始点云特征,当迭代流程为其他迭代流程,相应输入特征为上一次迭代流程所确定的每个点云的高维特征;若满足预设迭代停止条件,则停止迭代,
目标检测方法、装置、电子设备及存储介质.pdf
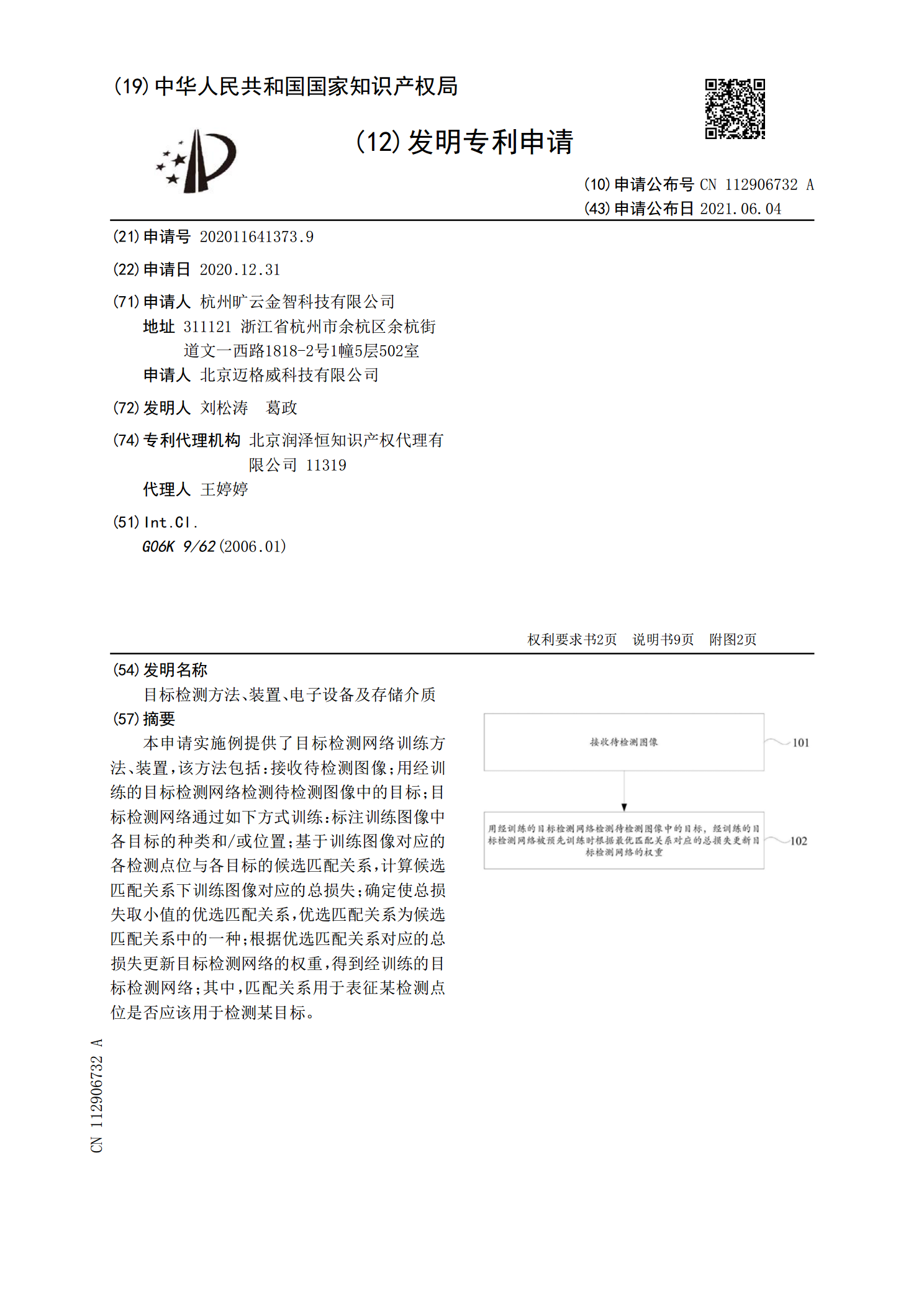
本申请实施例提供了目标检测网络训练方法、装置,该方法包括:接收待检测图像;用经训练的目标检测网络检测待检测图像中的目标;目标检测网络通过如下方式训练:标注训练图像中各目标的种类和/或位置;基于训练图像对应的各检测点位与各目标的候选匹配关系,计算候选匹配关系下训练图像对应的总损失;确定使总损失取小值的优选匹配关系,优选匹配关系为候选匹配关系中的一种;根据优选匹配关系对应的总损失更新目标检测网络的权重,得到经训练的目标检测网络;其中,匹配关系用于表征某检测点位是否应该用于检测某目标。
目标检测方法、装置、电子设备及存储介质.pdf
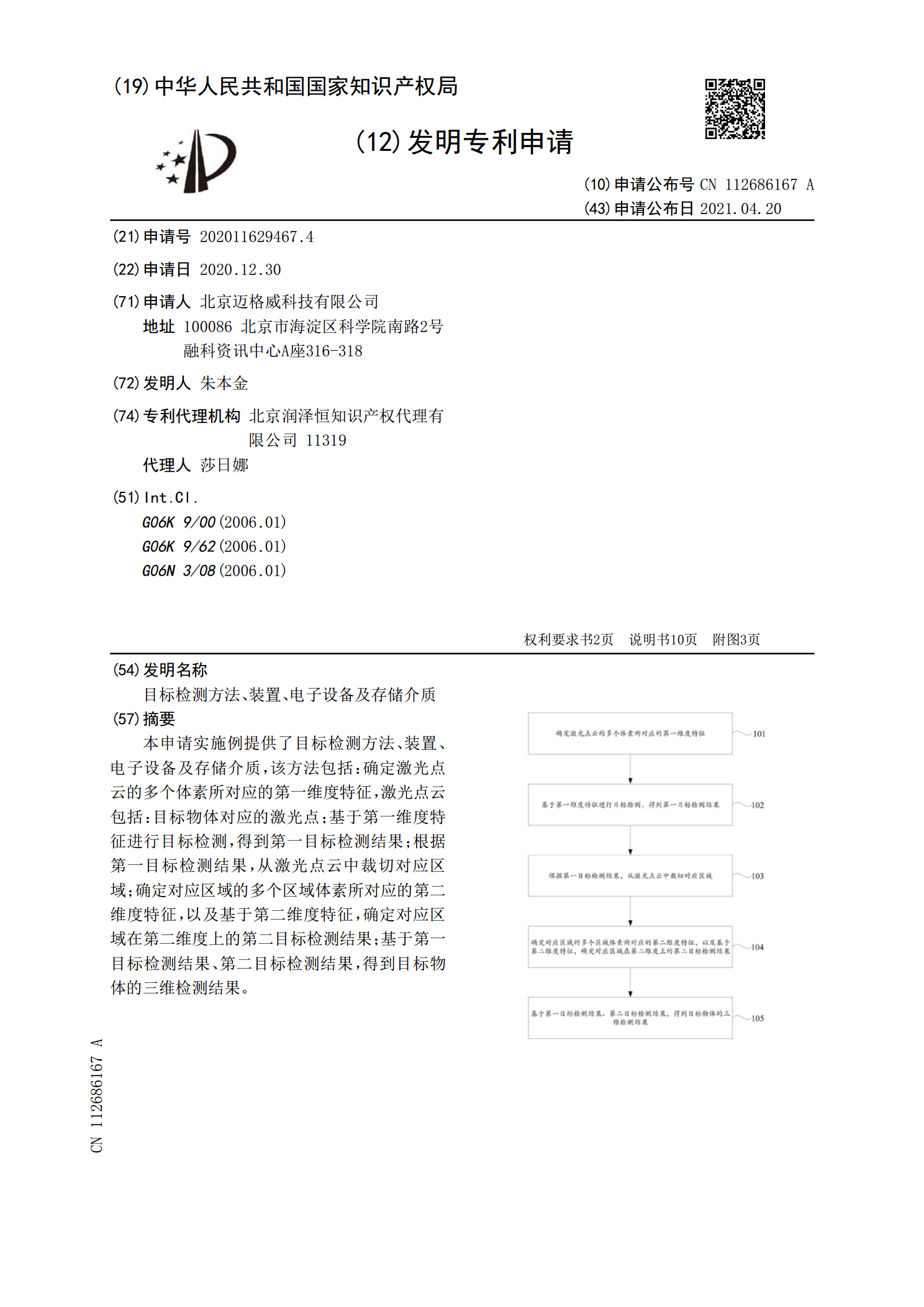
本申请实施例提供了目标检测方法、装置、电子设备及存储介质,该方法包括:确定激光点云的多个体素所对应的第一维度特征,激光点云包括:目标物体对应的激光点;基于第一维度特征进行目标检测,得到第一目标检测结果;根据第一目标检测结果,从激光点云中裁切对应区域;确定对应区域的多个区域体素所对应的第二维度特征,以及基于第二维度特征,确定对应区域在第二维度上的第二目标检测结果;基于第一目标检测结果、第二目标检测结果,得到目标物体的三维检测结果。