
异构飞轮储能系统的多目标控制方法、系统、装置及介质.pdf

玄静****写意

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
异构飞轮储能系统的多目标控制方法、系统、装置及介质.pdf
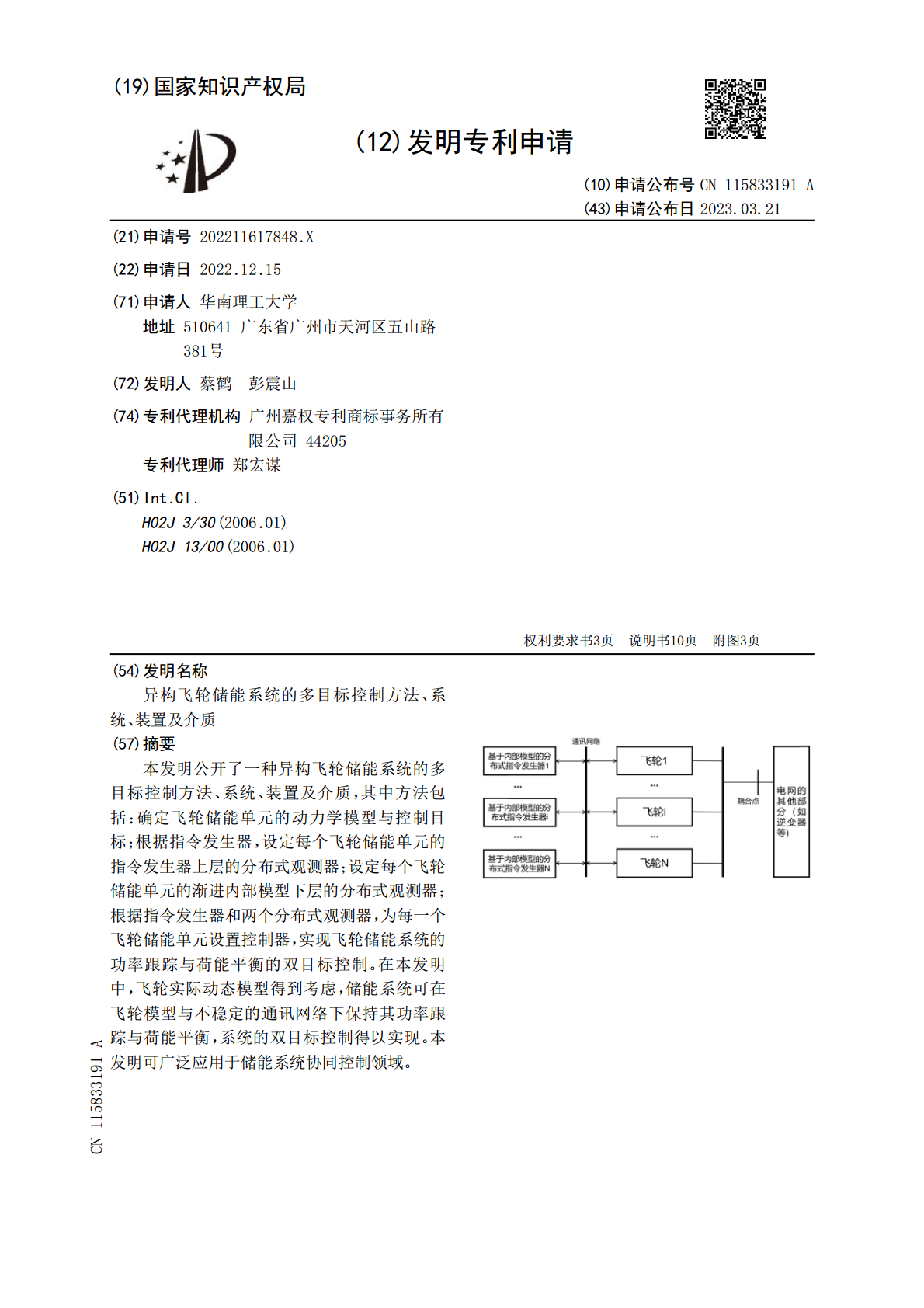
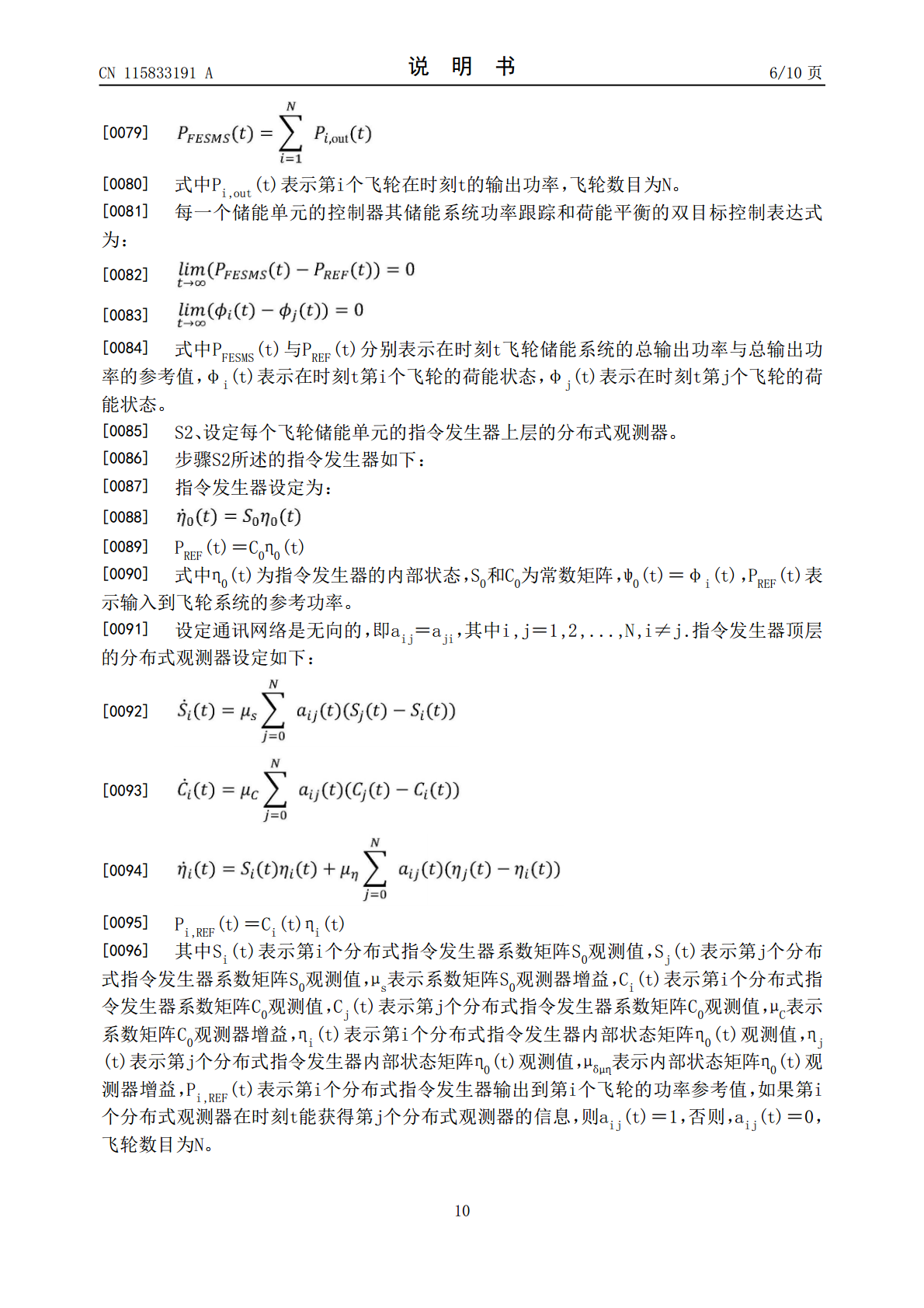
本发明公开了一种异构飞轮储能系统的多目标控制方法、系统、装置及介质,其中方法包括:确定飞轮储能单元的动力学模型与控制目标;根据指令发生器,设定每个飞轮储能单元的指令发生器上层的分布式观测器;设定每个飞轮储能单元的渐进内部模型下层的分布式观测器;根据指令发生器和两个分布式观测器,为每一个飞轮储能单元设置控制器,实现飞轮储能系统的功率跟踪与荷能平衡的双目标控制。在本发明中,飞轮实际动态模型得到考虑,储能系统可在飞轮模型与不稳定的通讯网络下保持其功率跟踪与荷能平衡,系统的双目标控制得以实现。本发明可广泛应用于储

飞轮储能系统的控制方法及装置.pdf
一种飞轮储能系统的控制方法及装置,所述方法包括:A、以飞轮的角速度、d轴和q轴的电流为状态变量、可变电阻为输入控制量,飞轮储能量为输出量构建飞轮储能系统的模型,根据采样时间将模型离散化;B、以二阶雷尼熵构建性能指标,根据性能指标对输入控制量增量的偏导为零确定最优输入控制量增量;C、利用最优输入控制量增量确定当前最优输入控制量。利用本发明的控制方法和装置,能够基于简化的飞轮储能模型,设计飞轮储能系统的控制器,利用飞轮储存多余能量或者填补不足的能量以保证风力发电机组向电网输送平滑功率。
飞轮储能装置的并机控制系统及飞轮储能阵列系统.pdf
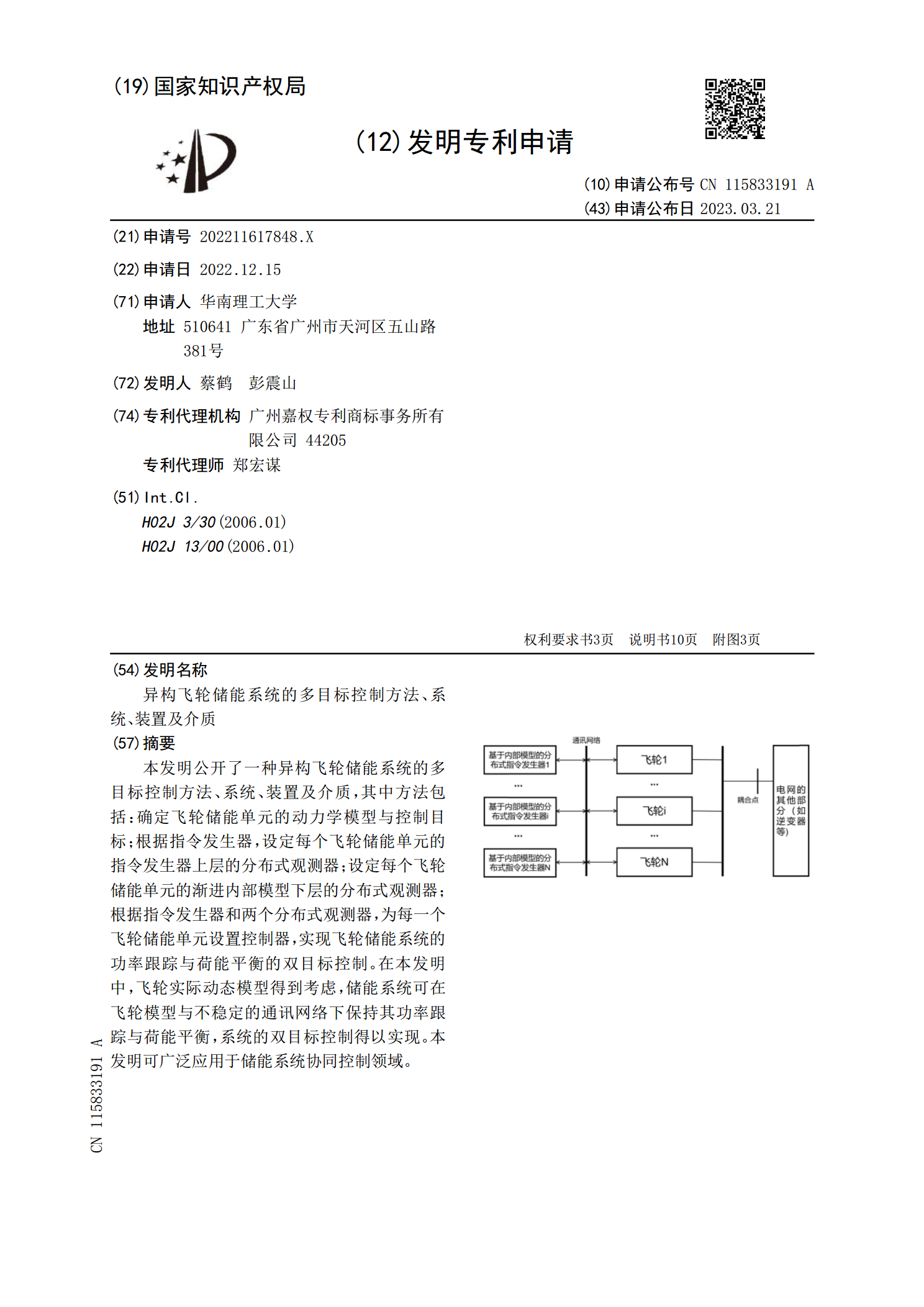
本发明提供的一种飞轮储能装置的并机控制系统及飞轮储能阵列系统,其中,该并机控制系统包括:飞轮协调器、能量管理系统、网侧PCS、触摸屏和至少两个飞轮单元;该飞轮单元包括:飞轮管理器、飞轮本体、与该飞轮本体连接的传感器组,以及分别与该飞轮管理器相连的飞轮机侧变流器FCS、磁轴承控制器、辅助监控系统;该飞轮单元、该飞轮协调器、该能量管理系统、该网侧PCS和该触摸屏分别通过对应的总线与该电力系统进行实时信息交互,以对飞轮储能阵列进行同步控制。该并机控制系统通过将各个子系统进行集成,同步完成功率和能量调度,从而有效
飞轮储能系统的安全减速装置以及控制方法.pdf
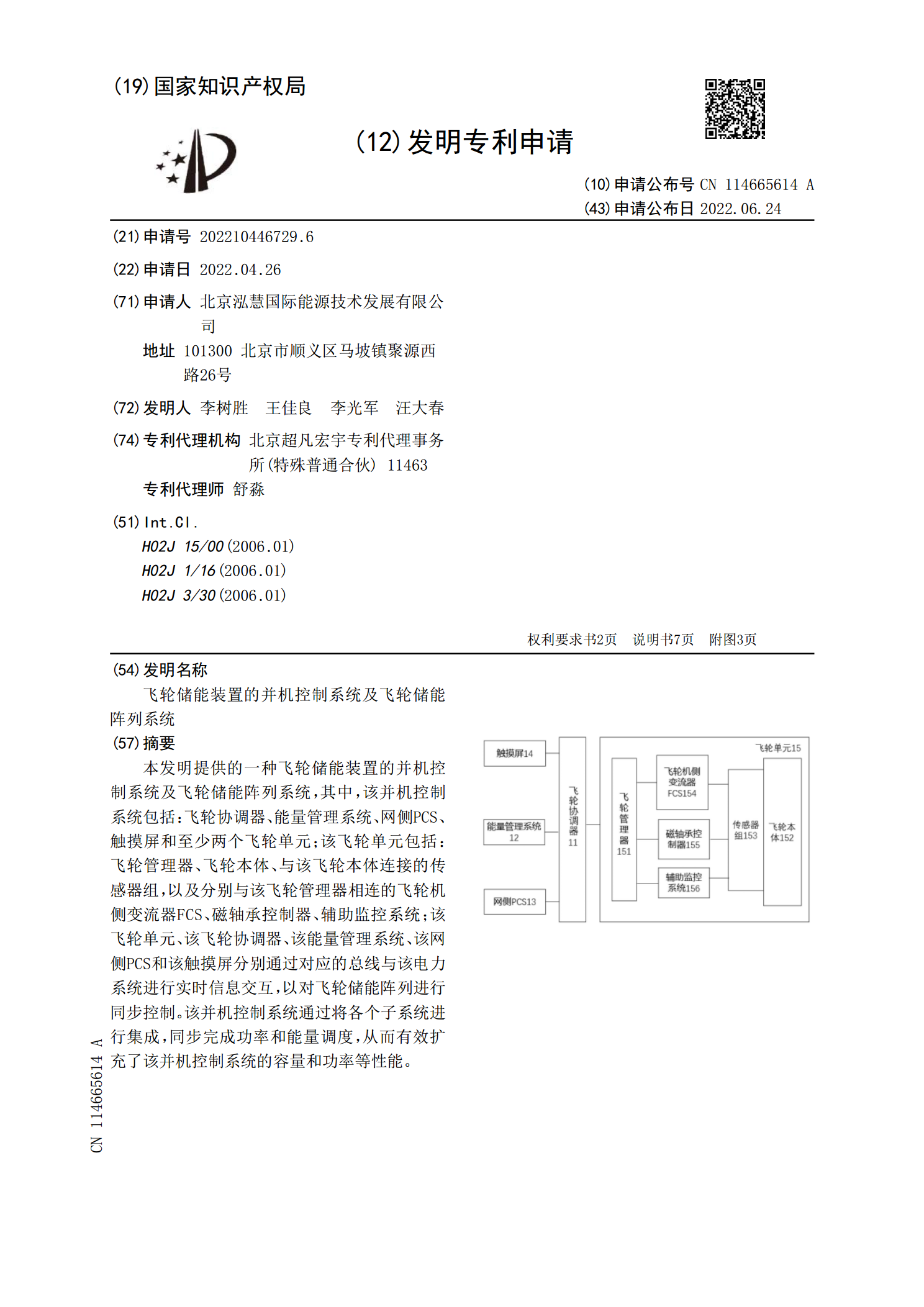
本发明公开了一种飞轮储能系统的安全减速装置以及控制方法,其包括:芯轴、配对圆锥滚子轴承、永磁轴承、电机转子、飞轮、锥轴承、储液箱、刹车系统和壳体;刹车系统包括制动装置、冷却/加热装置和控制器,制动装置包括圆弧刹车块、油压缸、中空刹车圆盘、中空柱塞式液压油缸和油压泵;冷却/加热装置至少包括第一电磁涡流距离传感器与温度传感器、第二电磁涡流距离传感器与温度传感器、温度传感器、储油箱冷却/加热管、轴承冷却管、圆弧刹车块冷却管、中空刹车圆盘冷却管、循环加热泵和循环降温泵。根据不同的状态,对飞轮储能系统的安全减速装置
高储能飞轮系统的散热方法及装置.pdf
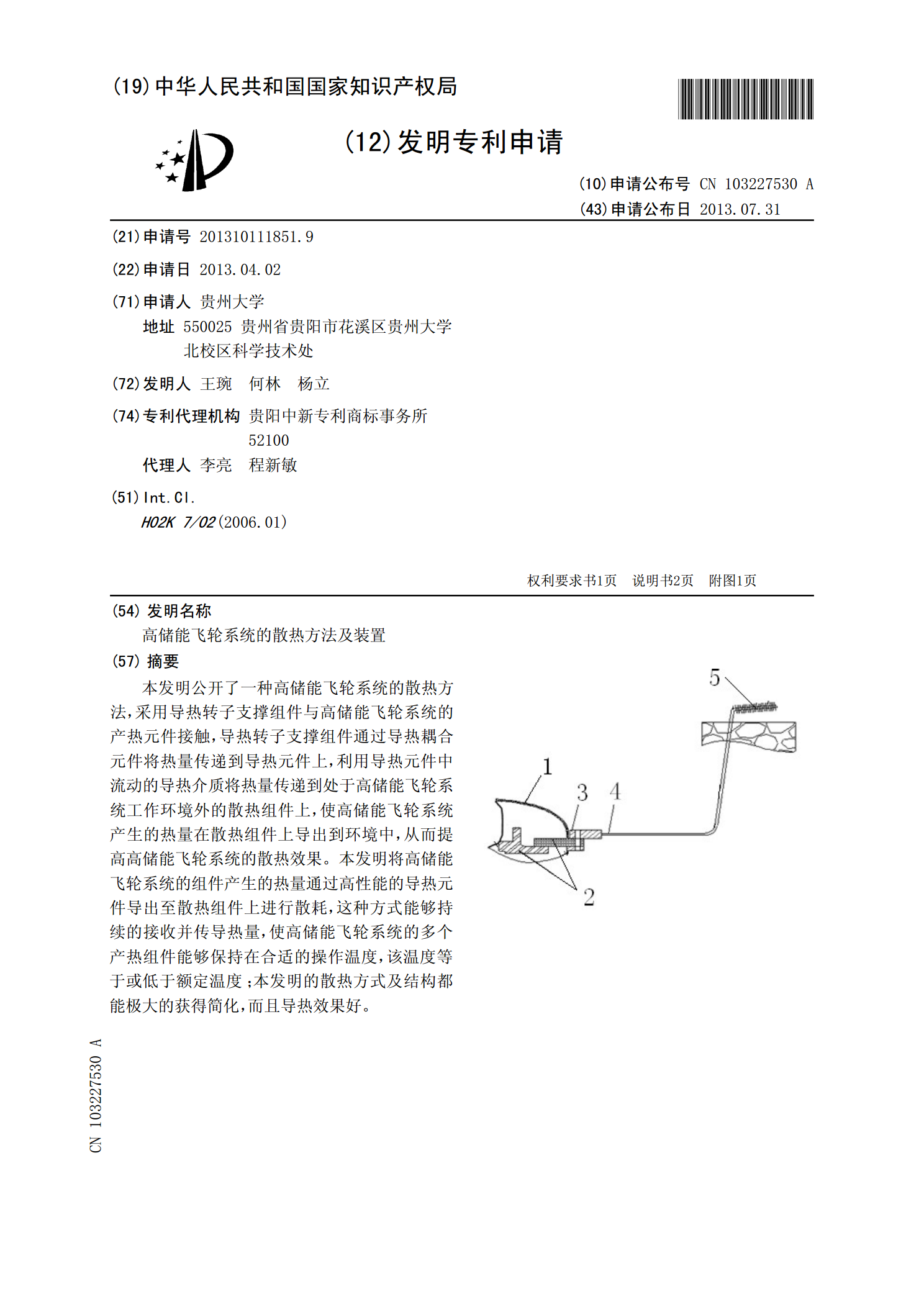
本发明公开了一种高储能飞轮系统的散热方法,采用导热转子支撑组件与高储能飞轮系统的产热元件接触,导热转子支撑组件通过导热耦合元件将热量传递到导热元件上,利用导热元件中流动的导热介质将热量传递到处于高储能飞轮系统工作环境外的散热组件上,使高储能飞轮系统产生的热量在散热组件上导出到环境中,从而提高高储能飞轮系统的散热效果。本发明将高储能飞轮系统的组件产生的热量通过高性能的导热元件导出至散热组件上进行散耗,这种方式能够持续的接收并传导热量,使高储能飞轮系统的多个产热组件能够保持在合适的操作温度,该温度等于或低于额