
地图构建方法、装置、设备和计算机可读存储介质.pdf

书生****文章

1/10

2/10
3/10
4/10

5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
地图构建方法、装置、设备和计算机可读存储介质.pdf
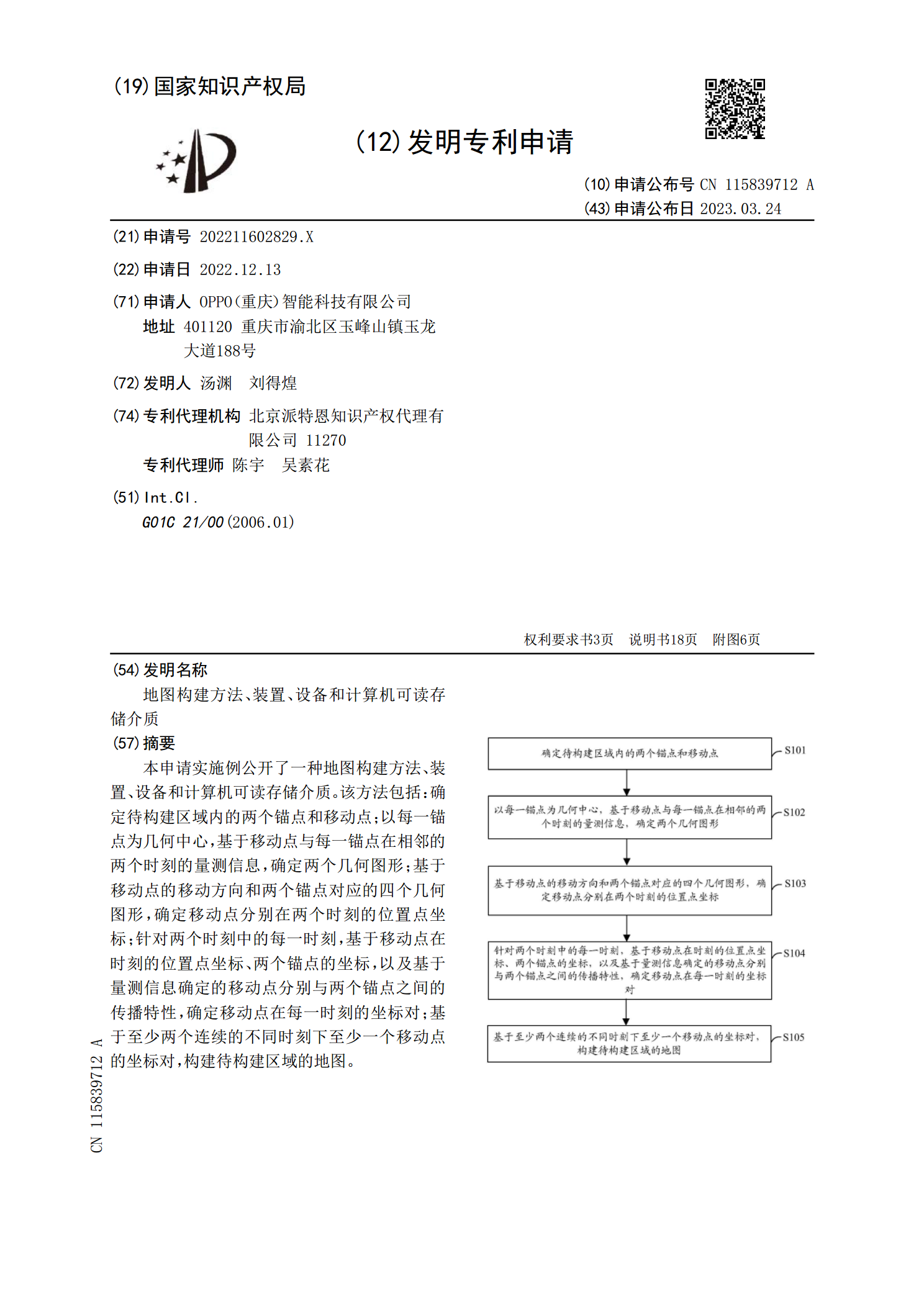
本申请实施例公开了一种地图构建方法、装置、设备和计算机可读存储介质。该方法包括:确定待构建区域内的两个锚点和移动点;以每一锚点为几何中心,基于移动点与每一锚点在相邻的两个时刻的量测信息,确定两个几何图形;基于移动点的移动方向和两个锚点对应的四个几何图形,确定移动点分别在两个时刻的位置点坐标;针对两个时刻中的每一时刻,基于移动点在时刻的位置点坐标、两个锚点的坐标,以及基于量测信息确定的移动点分别与两个锚点之间的传播特性,确定移动点在每一时刻的坐标对;基于至少两个连续的不同时刻下至少一个移动点的坐标对,构建待

点云地图构建方法、装置及计算机可读存储介质.pdf
本申请公开了一种点云地图构建方法、装置及计算机可读存储介质,该方法包括:采集待建图区域的多帧点云数据,并从采集的所述多帧点云数据中选取若干点云关键帧,组成点云关键帧序列;查找并保留所述点云关键帧序列中相邻点云关键帧之间的共同点云,以对所述点云关键帧序列进行优化;根据优化后的点云关键帧序列构建点云地图。本申请能够节省内存空间和计算资源,满足3D场景需求,提升点云地图的定位精度。

构建地图的方法、装置、电子设备及计算机可读存储介质.pdf
本申请涉及一种构建地图的方法、装置、电子设备及计算机可读存储介质,包括:获取至少一个鱼眼相机采集的图像数据、至少一个雷达传感器采集的雷达数据、轮速里程计采集到的轮速数据以及IMU数据,然后基于采集到的图像数据、轮速数据以及IMU数据,进行视觉地图建图,得到每路鱼眼相机对应的地图信息,以及,基于雷达数据进行毫米波建图,得到至少一个毫米波地图信息,然后基于图像数据以及每路鱼眼相机对应的地图信息进行目标检测以及语义分割处理,生成2D车位对象地图以及2D语义点云地图,然后基于每路鱼眼相机对应的地图信息、毫米波地图
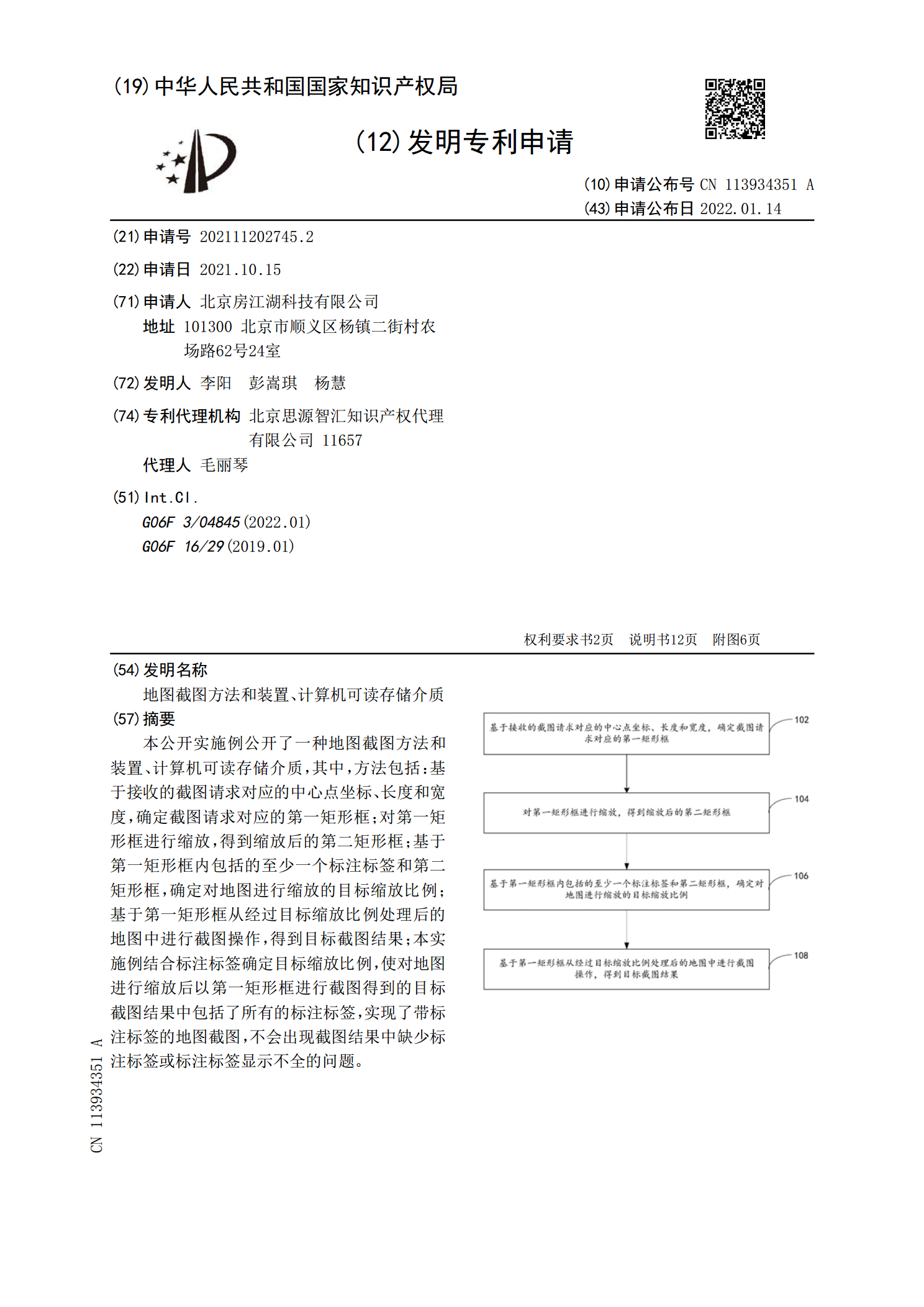
地图截图方法和装置、计算机可读存储介质.pdf
本公开实施例公开了一种地图截图方法和装置、计算机可读存储介质,其中,方法包括:基于接收的截图请求对应的中心点坐标、长度和宽度,确定截图请求对应的第一矩形框;对第一矩形框进行缩放,得到缩放后的第二矩形框;基于第一矩形框内包括的至少一个标注标签和第二矩形框,确定对地图进行缩放的目标缩放比例;基于第一矩形框从经过目标缩放比例处理后的地图中进行截图操作,得到目标截图结果;本实施例结合标注标签确定目标缩放比例,使对地图进行缩放后以第一矩形框进行截图得到的目标截图结果中包括了所有的标注标签,实现了带标注标签的地图截图
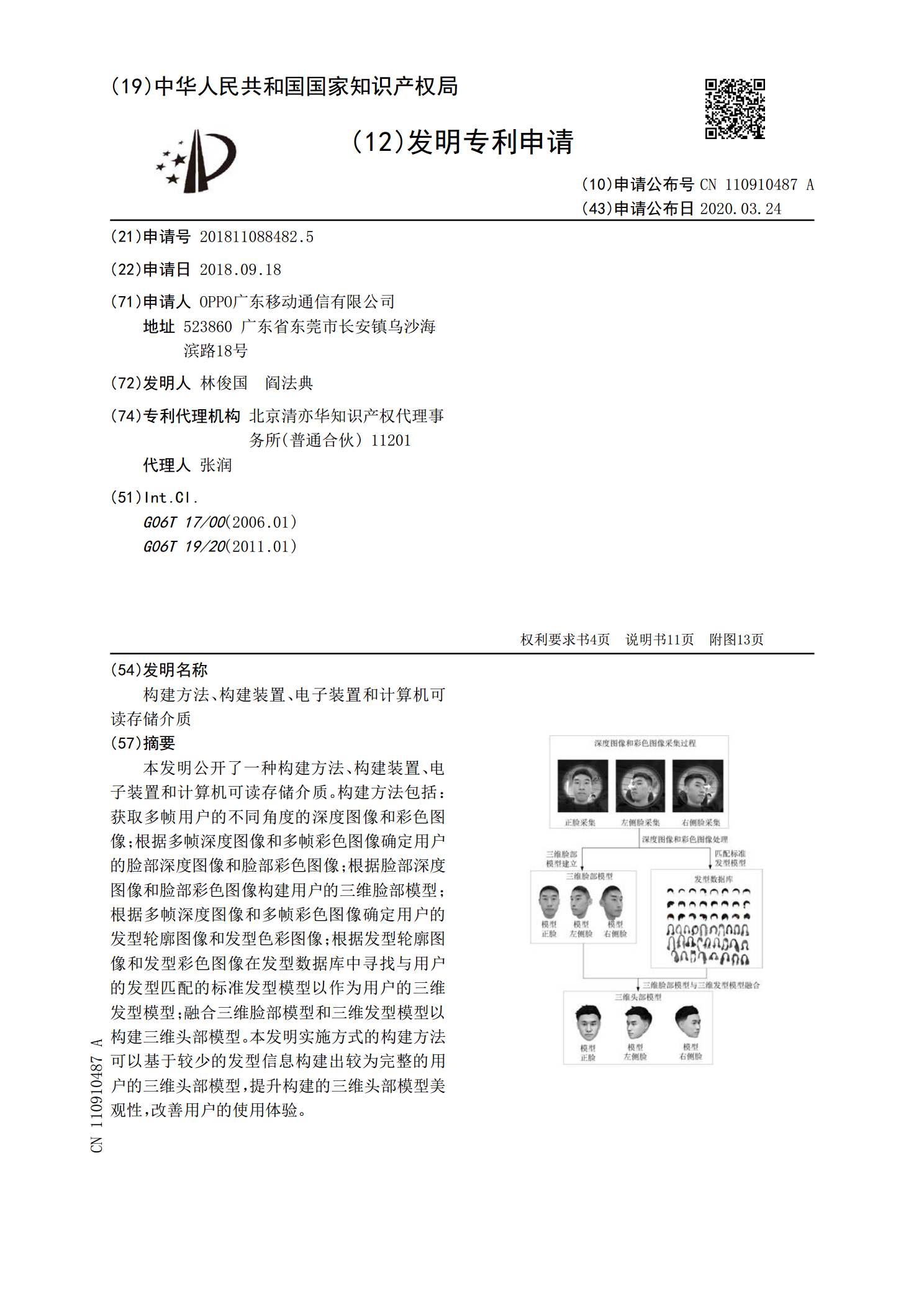
构建方法、构建装置、电子装置和计算机可读存储介质.pdf
本发明公开了一种构建方法、构建装置、电子装置和计算机可读存储介质。构建方法包括:获取多帧用户的不同角度的深度图像和彩色图像;根据多帧深度图像和多帧彩色图像确定用户的脸部深度图像和脸部彩色图像;根据脸部深度图像和脸部彩色图像构建用户的三维脸部模型;根据多帧深度图像和多帧彩色图像确定用户的发型轮廓图像和发型色彩图像;根据发型轮廓图像和发型彩色图像在发型数据库中寻找与用户的发型匹配的标准发型模型以作为用户的三维发型模型;融合三维脸部模型和三维发型模型以构建三维头部模型。本发明实施方式的构建方法可以基于较少的发型