
一种异形复杂曲面胶接装置.pdf

努力****元恺

1/10

2/10
3/10

4/10
5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种异形复杂曲面胶接装置.pdf
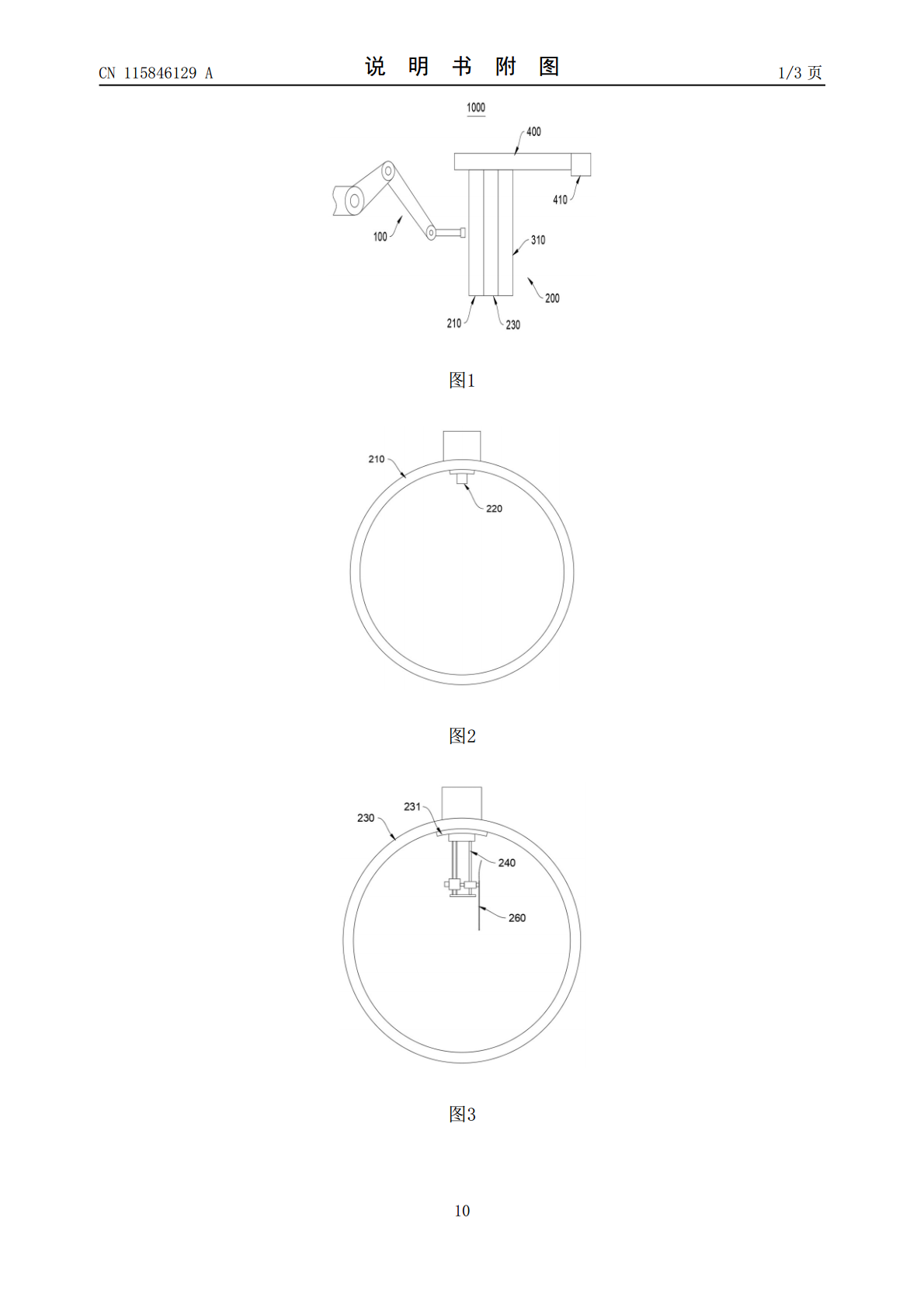
本发明涉及工件胶接技术领域,具体涉及一种异形复杂曲面胶接装置,包括:抓取机构、控制机构、扫描机构和上胶机构。抓取机构用于抓取待粘接工件。扫描机构用于扫描由抓取机构抓取的待粘接工件的曲面轮廓,并将曲面轮廓数据传送至控制机构。控制机构哟关于根据曲面轮廓数据控制上胶机构在待粘接工件的对应曲面上打胶。其能够有效地提高胶结效果,优化胶接工件的品质,对于提高良品率具有积极效果。

曲面异形玻璃的胶接方法.pdf
本发明是关于一种曲面异形玻璃的胶接方法,包括以下步骤:1)将曲面异形玻璃放入上模具和下模具中,使玻璃边缘位于上模具和下模具形成的腔体中,所述的上模具和/或下模具设有至少两个通孔;2)通过其中一个通孔进行抽真空,使腔体内的压力降低;3)通过压力机将密封胶通过另外的通孔注入到所述的腔体中;4)至所述的腔体被所述的密封胶完全充满,静置,脱膜。本发明的方法可以使大曲面异形玻璃的胶接质量更优,解决由于人工操作手法造成固化后的密封胶外观不平整、内部孔隙多的情况;本发明的方法由于密封胶在抽真空的情况下可以自然流动,填满
一种异形复杂曲面用夹紧机构.pdf
本发明涉及夹具领域,尤其涉及一种异形复杂曲面用夹紧机构。底板和顶板之间通过第一螺栓连接有框型支撑板;在该异形复杂曲面工件的外侧设置有异形曲面叶片;在该螺纹安装孔中配合有竖直向上的定位杆,定位杆与轴孔间隙配合,定位杆的上端伸出轴孔并配合有压紧螺帽;在顶板下部两侧设置有与其中两个异形曲面叶片配合的稳定装置。本发明的异形复杂曲面用夹紧机构,定位杆连接在底板上,让异形复杂曲面工件与定位杆配合;然后放置顶板,并通过第一螺栓连接,进一步夹紧固定;然后让稳定装置与异形曲面叶片配合,稳定异形曲面叶片,避免损伤。既能够保证

一种异形曲面磨削装置.pdf
本专利涉及磨削领域,具体公开了一种异形曲面磨削装置,本磨削装置中的张紧机构的设置,实现对砂带和接触磨轮的快速更换,进而让工作人员能够根据待加工需求来更换直径不同的接触磨轮和不同规格的砂带,同时能够通过调节调节杆来快速的调节砂带的转速和张紧力,调节后砂带的张紧力和转速的变化响应速度快,整个装置的结构简单,成本低廉;同时对操作人员的要求不高,能降低人力成本,进而能有效的降低工件异形曲面的磨削成本。
一种异形点胶装置.pdf
本实用新型提供一种异形点胶装置,涉及点胶设备技术领域,包括底座,所述点胶头的外表面固定连接有连接架,所述连接架的外表面活动连接有安装块,所述条形槽的内部固定连接有固定块,所述第二固定柱的外表面活动连接有弹簧,所述条形槽的内侧壁开设有第二滑槽,所述第二滑块的侧表面固定连接有连接柱,所述第二固定柱贯穿第二滑块,所述第二滑块的外表面固定连接有限位架。本实用新型,通过设置连接柱、第二滑块和限位架,有利于提升装置的便捷性,方便根据芯片的尺寸大小更换点胶头,也便于进行拆卸,省时省力,设置点胶头和连接架,既有利于保障品