
一种基于双分支结构的实时遥感图像云检测方法.pdf

雨巷****轶丽


1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于双分支结构的实时遥感图像云检测方法.pdf
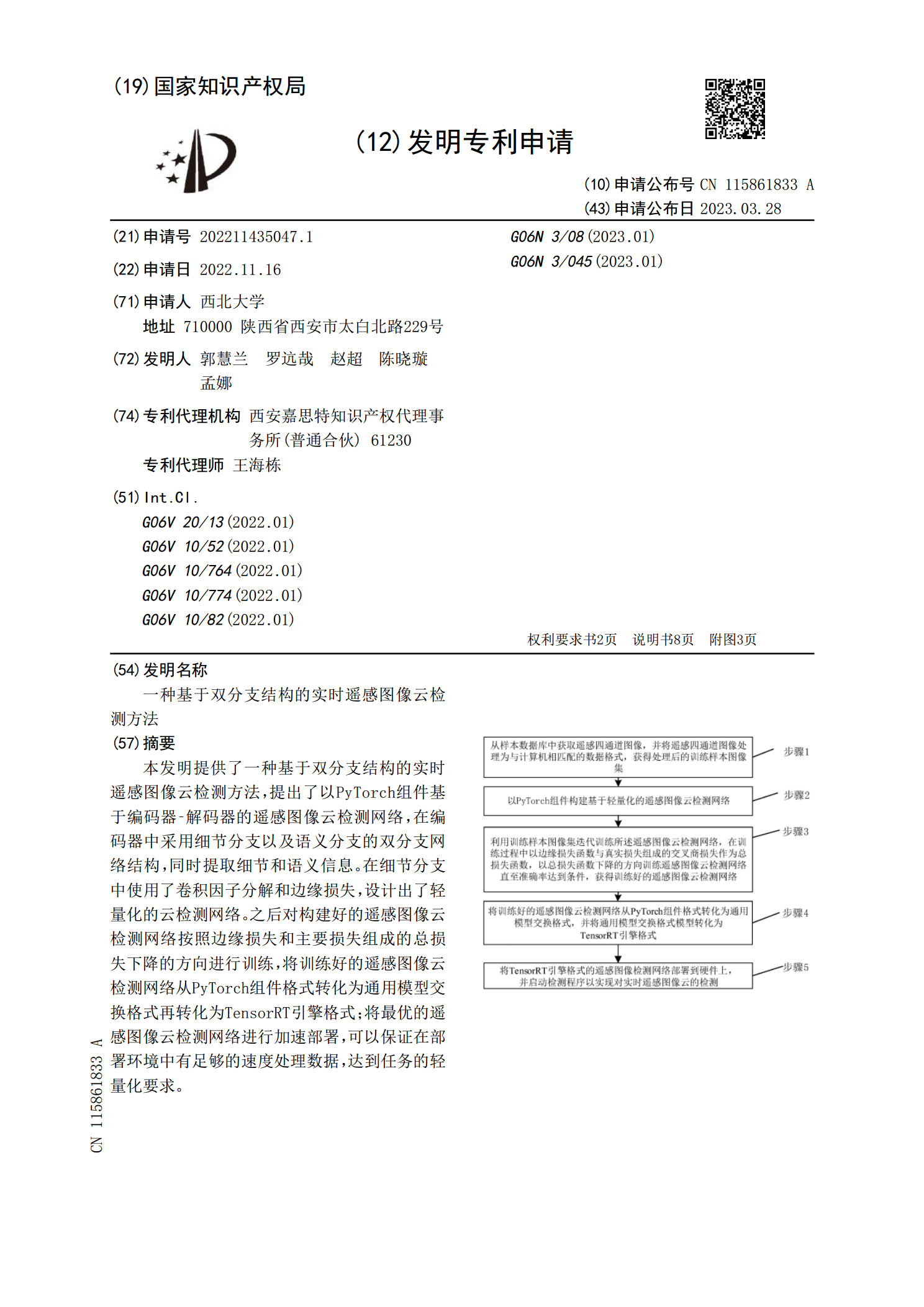
本发明提供了一种基于双分支结构的实时遥感图像云检测方法,提出了以PyTorch组件基于编码器‑解码器的遥感图像云检测网络,在编码器中采用细节分支以及语义分支的双分支网络结构,同时提取细节和语义信息。在细节分支中使用了卷积因子分解和边缘损失,设计出了轻量化的云检测网络。之后对构建好的遥感图像云检测网络按照边缘损失和主要损失组成的总损失下降的方向进行训练,将训练好的遥感图像云检测网络从PyTorch组件格式转化为通用模型交换格式再转化为TensorRT引擎格式;将最优的遥感图像云检测网络进行加速部署,可以保证

一种基于双分支网络模型的云检测方法.pdf
本申请涉及遥感图像处理技术领域,提出了一种基于双分支网络模型的云检测方法,包括以下步骤:构建云检测数据集并设计TransDiffNet云检测模型;基于TransDiffNet云检测模型预测,输入遥感影像表观反射率和差异特征,获得遥感影像云检测结果,本方案弥补纯卷积神经网络(ConvolutionalNeuralNetwork,CNN)结构获取全局信息的缺失和纯Transformer结构捕获空间细节特征的不足,减少云与明亮地表特征的混淆以及薄云遗漏,提高云检测精度。

一种基于双分支结构的多层级点云补全方法.pdf
本发明公开了一种基于双分支结构的多层级点云补全方法,包括:利用两个独立的分支网络对输入点云进行采样和特征编码,使用共享多层感知机分别提取出点云的局部特征信息和全局特征信息;将全局特征进行扩展形成和局部特征同等大小的特征;使用五层联合感知机将特征向量映射成多个维度,进而提取多维特征信息并将其整合成最终特征向量;采用基于分形几何结构的多层级解码器,对最终特征向量进行特征解码,预测三种不同分辨率的点云。本发明能够同时在双通道上分别提取输入点云的全局特征和局部特征,并且避免了特征间的相互干扰,增强网络提取语义和几

一种用于遥感图像中小目标检测的多分支检测方法.pdf
本发明提供一种用于遥感图像中小目标检测的多分支检测方法。该方法包括:步骤1:构建RepDarkNet主干网络,使用所述RepDarkNet主干网络对遥感图像进行特征提取,其中,所述RepDarkNet主干网络包含五个串联的特征提取分支;步骤2:构建跨层融合网络,使用所述跨层融合网络对所述RepDarkNet主干网络提取到的五个特征图进行跨层特征融合;步骤3:设计边界框回归损失函数,基于所述边界框损失函数和融合后特征得到小目标检测框。通过在Dior数据集和NWPUVHR?10数据集上进行实验,本发明可以较好

遥感图像云检测方法综述.docx
遥感图像云检测方法综述标题:遥感图像云检测方法综述摘要:遥感图像云检测是遥感图像处理中的一个重要问题,对于提高遥感图像的质量和应用价值具有重要作用。本文对当前主流的遥感图像云检测方法进行了综述,包括传统的基于阈值分割和纹理特征的方法,以及基于机器学习和深度学习的方法。通过对比分析各种方法的优缺点及其适用场景,为进一步研究和应用提供参考。1.引言随着卫星技术的快速发展,遥感图像在农业、气象、环境等领域得到了广泛应用。然而,由于大气、云层等因素的存在,遥感图像中经常出现云遮挡的情况。云遮挡对遥感图像的质量和数