
一种基于双分支结构的多层级点云补全方法.pdf

羽沫****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于双分支结构的多层级点云补全方法.pdf
本发明公开了一种基于双分支结构的多层级点云补全方法,包括:利用两个独立的分支网络对输入点云进行采样和特征编码,使用共享多层感知机分别提取出点云的局部特征信息和全局特征信息;将全局特征进行扩展形成和局部特征同等大小的特征;使用五层联合感知机将特征向量映射成多个维度,进而提取多维特征信息并将其整合成最终特征向量;采用基于分形几何结构的多层级解码器,对最终特征向量进行特征解码,预测三种不同分辨率的点云。本发明能够同时在双通道上分别提取输入点云的全局特征和局部特征,并且避免了特征间的相互干扰,增强网络提取语义和几

基于多分支结构的点云补全网络.docx
基于多分支结构的点云补全网络基于多分支结构的点云补全网络摘要:点云补全是计算机视觉领域中一个重要的任务,它可以将不完整或噪声污染的点云数据恢复为完整的点云模型。本文提出了一种基于多分支结构的点云补全网络,该网络利用深度学习技术,通过学习局部和全局特征,从而实现点云的高质量补全。实验结果表明,所提出的网络在补全效果和计算效率方面都具有较好的表现。关键词:点云补全、多分支结构、深度学习、局部特征、全局特征1.简介点云是由多个离散点组成的三维数据结构,广泛应用于计算机图形学、机器人定位与导航、虚拟现实和增强现实
一种基于双分支结构的实时遥感图像云检测方法.pdf
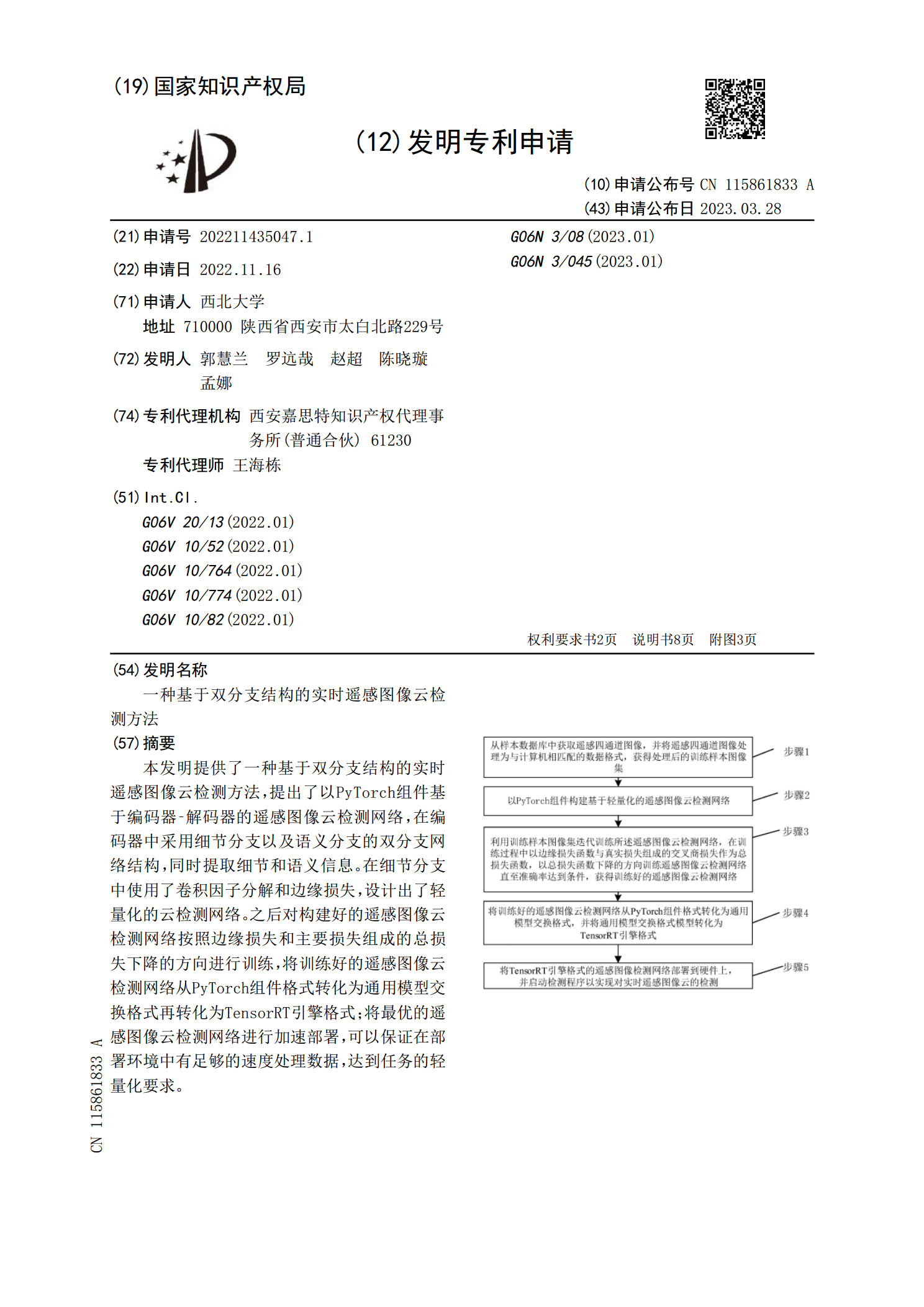
本发明提供了一种基于双分支结构的实时遥感图像云检测方法,提出了以PyTorch组件基于编码器‑解码器的遥感图像云检测网络,在编码器中采用细节分支以及语义分支的双分支网络结构,同时提取细节和语义信息。在细节分支中使用了卷积因子分解和边缘损失,设计出了轻量化的云检测网络。之后对构建好的遥感图像云检测网络按照边缘损失和主要损失组成的总损失下降的方向进行训练,将训练好的遥感图像云检测网络从PyTorch组件格式转化为通用模型交换格式再转化为TensorRT引擎格式;将最优的遥感图像云检测网络进行加速部署,可以保证

一种基于双分支网络模型的云检测方法.pdf
本申请涉及遥感图像处理技术领域,提出了一种基于双分支网络模型的云检测方法,包括以下步骤:构建云检测数据集并设计TransDiffNet云检测模型;基于TransDiffNet云检测模型预测,输入遥感影像表观反射率和差异特征,获得遥感影像云检测结果,本方案弥补纯卷积神经网络(ConvolutionalNeuralNetwork,CNN)结构获取全局信息的缺失和纯Transformer结构捕获空间细节特征的不足,减少云与明亮地表特征的混淆以及薄云遗漏,提高云检测精度。

一种基于深度学习的树木点云补全方法.pdf
本发明公开了一种基于深度学习的树木点云补全方法,本方法为缺失点云预测和补全结果优化两个阶段。在预测阶段我们使用端到端的神经网络,通过给定残缺树木点云预测缺失的部分。在此阶段仅预测缺失部分的点云,保持输入点云不变。但预测结果存在与输入点云融合不好的现象。为此,我们采用点云优化网络对预测结果和原始输入做进一步的处理,以优化总体分布。我们的结果表明,针对残缺树木点云补全,预测网络和优化网络的组合取得了较好的效果。具有补全效率高、形态真实、适用范围广的特点。本发明为避免由于体素化带来的的高存储成本和几何信息的丢失