
一种常导高速磁浮交通的仿真系统和方法.pdf

一吃****永贺

1/10

2/10

3/10

4/10
5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种常导高速磁浮交通的仿真系统和方法.pdf
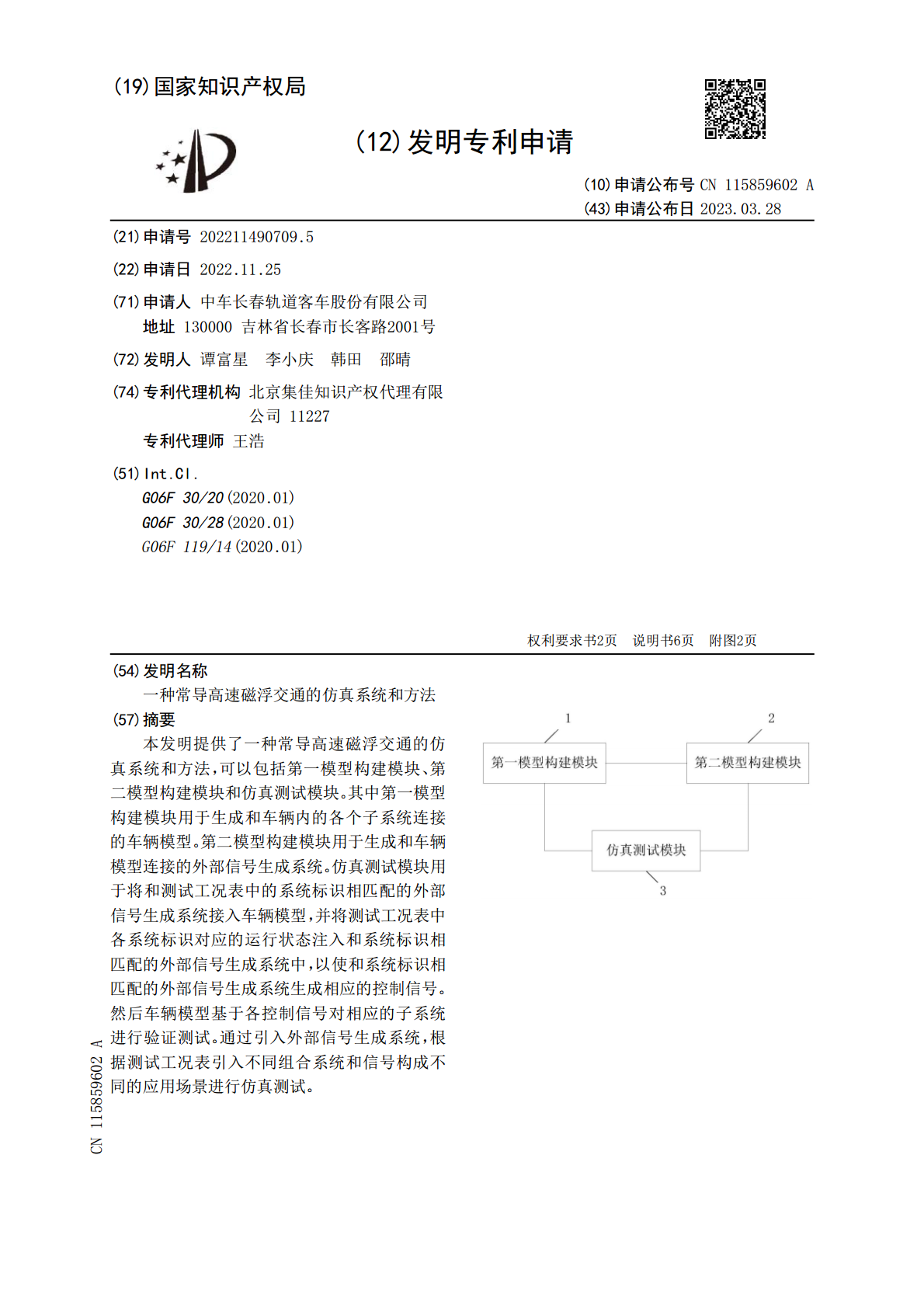
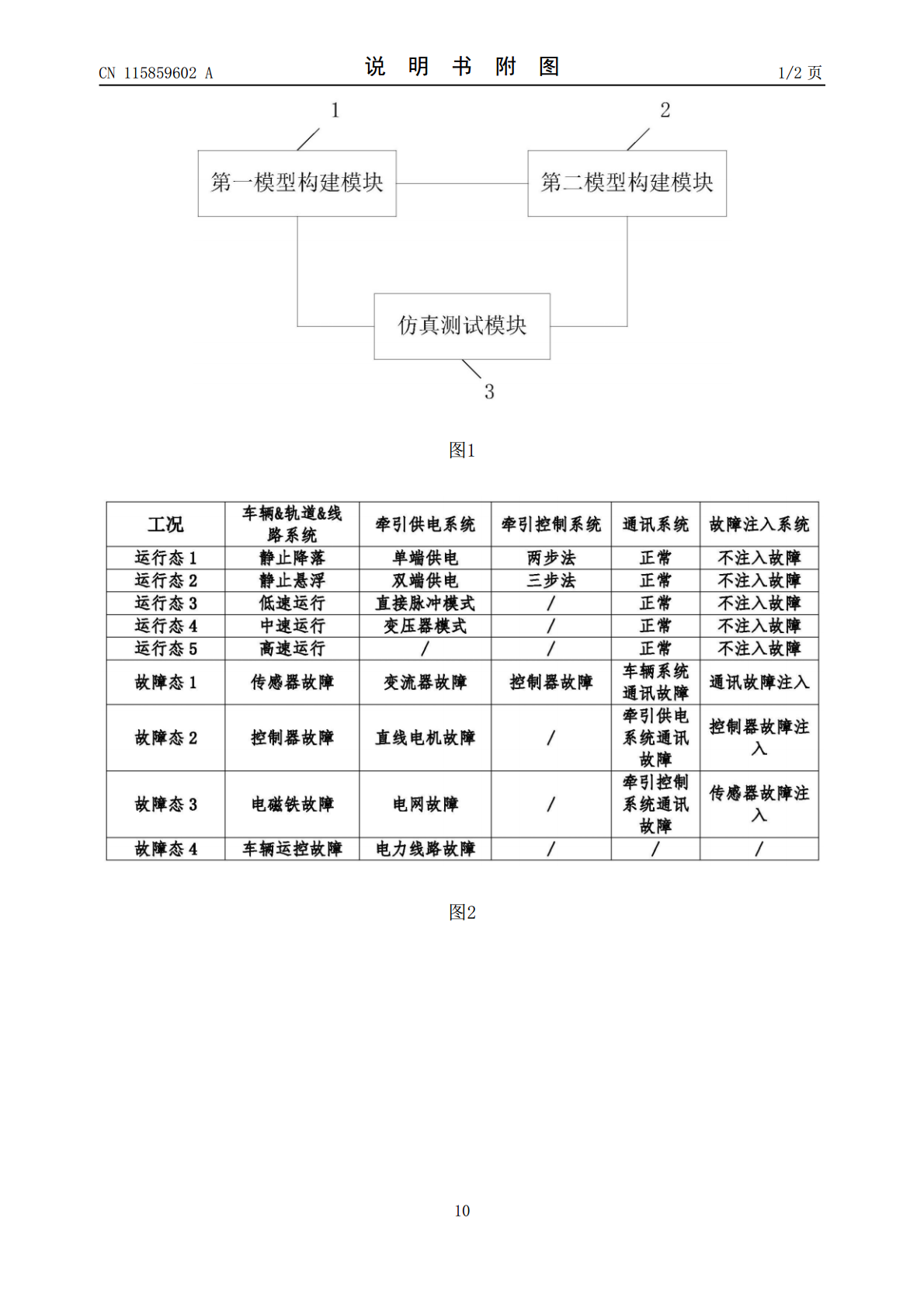
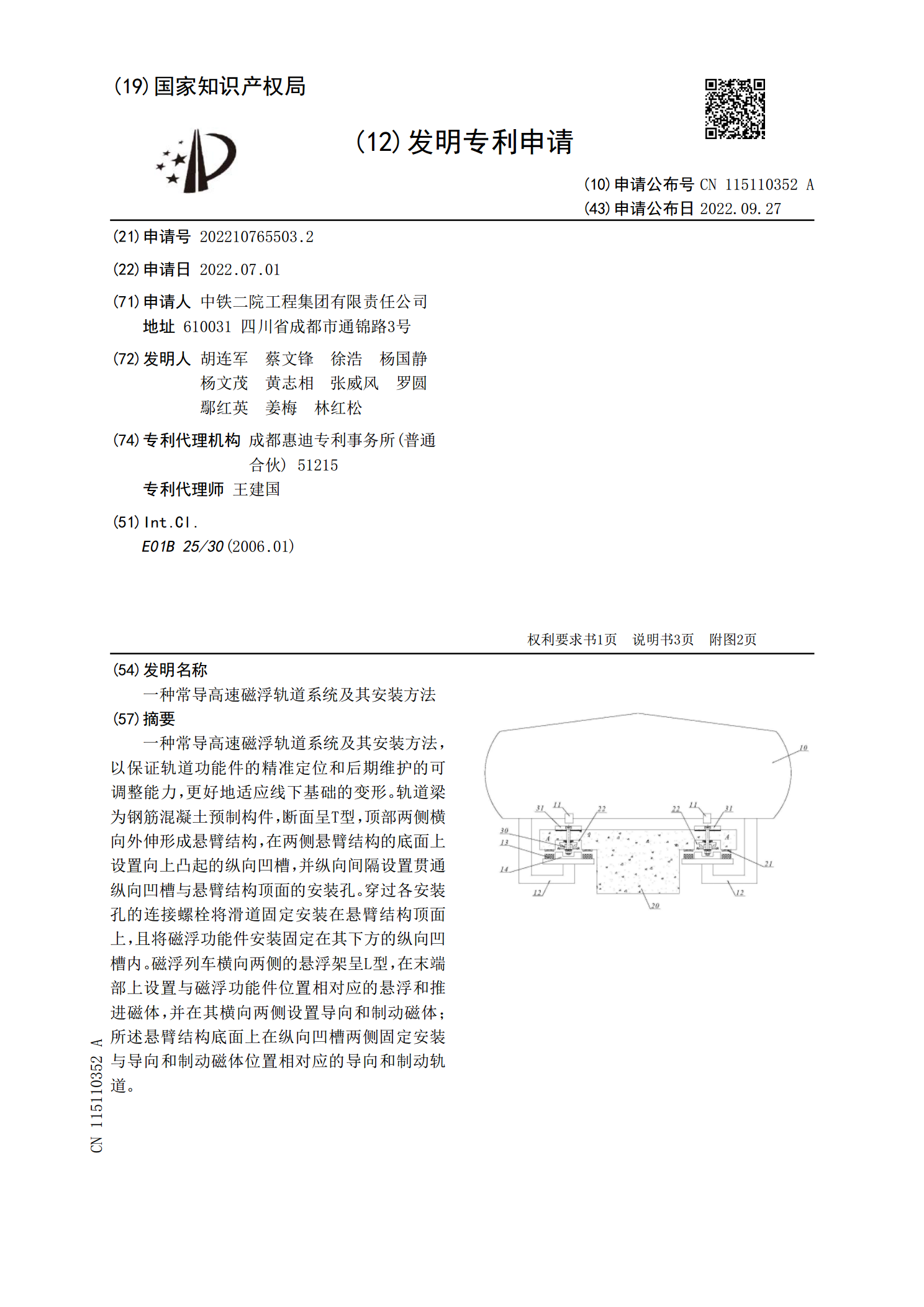
本发明提供了一种常导高速磁浮交通的仿真系统和方法,可以包括第一模型构建模块、第二模型构建模块和仿真测试模块。其中第一模型构建模块用于生成和车辆内的各个子系统连接的车辆模型。第二模型构建模块用于生成和车辆模型连接的外部信号生成系统。仿真测试模块用于将和测试工况表中的系统标识相匹配的外部信号生成系统接入车辆模型,并将测试工况表中各系统标识对应的运行状态注入和系统标识相匹配的外部信号生成系统中,以使和系统标识相匹配的外部信号生成系统生成相应的控制信号。然后车辆模型基于各控制信号对相应的子系统进行验证测试。通过引
一种常导高速磁浮轨道系统及其安装方法.pdf
一种常导高速磁浮轨道系统及其安装方法,以保证轨道功能件的精准定位和后期维护的可调整能力,更好地适应线下基础的变形。轨道梁为钢筋混凝土预制构件,断面呈T型,顶部两侧横向外伸形成悬臂结构,在两侧悬臂结构的底面上设置向上凸起的纵向凹槽,并纵向间隔设置贯通纵向凹槽与悬臂结构顶面的安装孔。穿过各安装孔的连接螺栓将滑道固定安装在悬臂结构顶面上,且将磁浮功能件安装固定在其下方的纵向凹槽内。磁浮列车横向两侧的悬浮架呈L型,在末端部上设置与磁浮功能件位置相对应的悬浮和推进磁体,并在其横向两侧设置导向和制动磁体;所述悬臂结构

一种常导高速磁浮车辆及轨道系统.pdf
一种常导高速磁浮车辆及轨道系统,既有效降低磁浮系统轨道结构建设成本,又能保证列车运行时的平稳及滑行状态时的平衡,更好地适应线下基础的变形。涉及磁浮车辆和轨道梁,所述轨道梁的横断面呈T型,其横臂顶面在轨道梁竖向中心线两侧形成向下倾斜的斜面,在两侧斜面上各设置一条与磁浮车辆底部走行轮相对应的纵向滑槽;所述磁浮车辆底部或者轨道梁顶部中央部位固定设置一条导向和制动轨道,于该导向和制动轨道的横向两侧外分别设置导向和制动磁体;所述轨道梁横臂两侧底面上安装设置功能件,位于其下方的悬浮和推进磁体固定安装在磁浮车辆两侧的L
高速动车组与常导磁浮车辆制动系统差异分析.pptx
汇报人:目录PARTONEPARTTWO高速动车组制动系统简介常导磁浮车辆制动系统简介PARTTHREE高速动车组制动系统原理及组成常导磁浮车辆制动系统原理及组成PARTFOUR制动性能比较稳定性与安全性比较维护与检修比较PARTFIVE高速动车组制动系统应用现状常导磁浮车辆制动系统应用现状未来发展趋势与展望PARTSIX总结比较结果对未来研究的建议THANKYOU

常导长定子高速磁浮限界计算探讨.docx
常导长定子高速磁浮限界计算探讨标题:常导长定子高速磁浮限界计算探讨摘要:高速磁浮列车作为一种创新的交通方式,在现代交通领域中具有广阔的应用前景。其中,常导长定子是一种重要的关键技术,其可有效降低磁浮列车对轨道的摩擦阻力。因此,本论文将讨论常导长定子高速磁浮列车的限界计算问题,并对其计算方法进行探讨。第一节:引言介绍高速磁浮列车的背景和当前研究现状。明确研究的目的和意义,提出研究的主要内容以及论文的结构安排。第二节:常导长定子结构与工作原理介绍常导长定子的结构和工作原理。重点讨论常导长定子如何减小列车与轨道