
一种船舶电力推进防误操作控制装置.pdf

音景****ka

1/10
2/10
3/10

4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种船舶电力推进防误操作控制装置.pdf
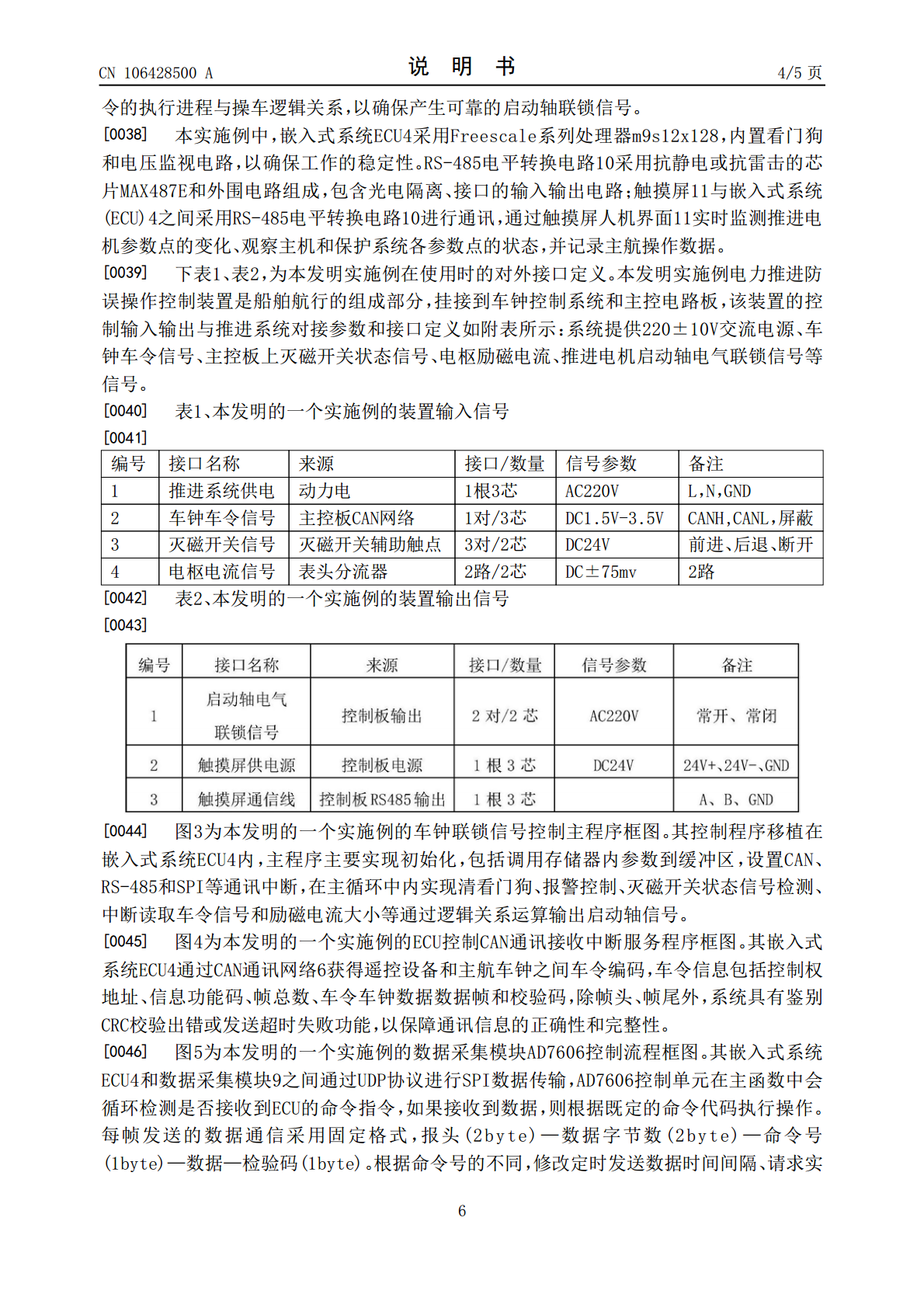
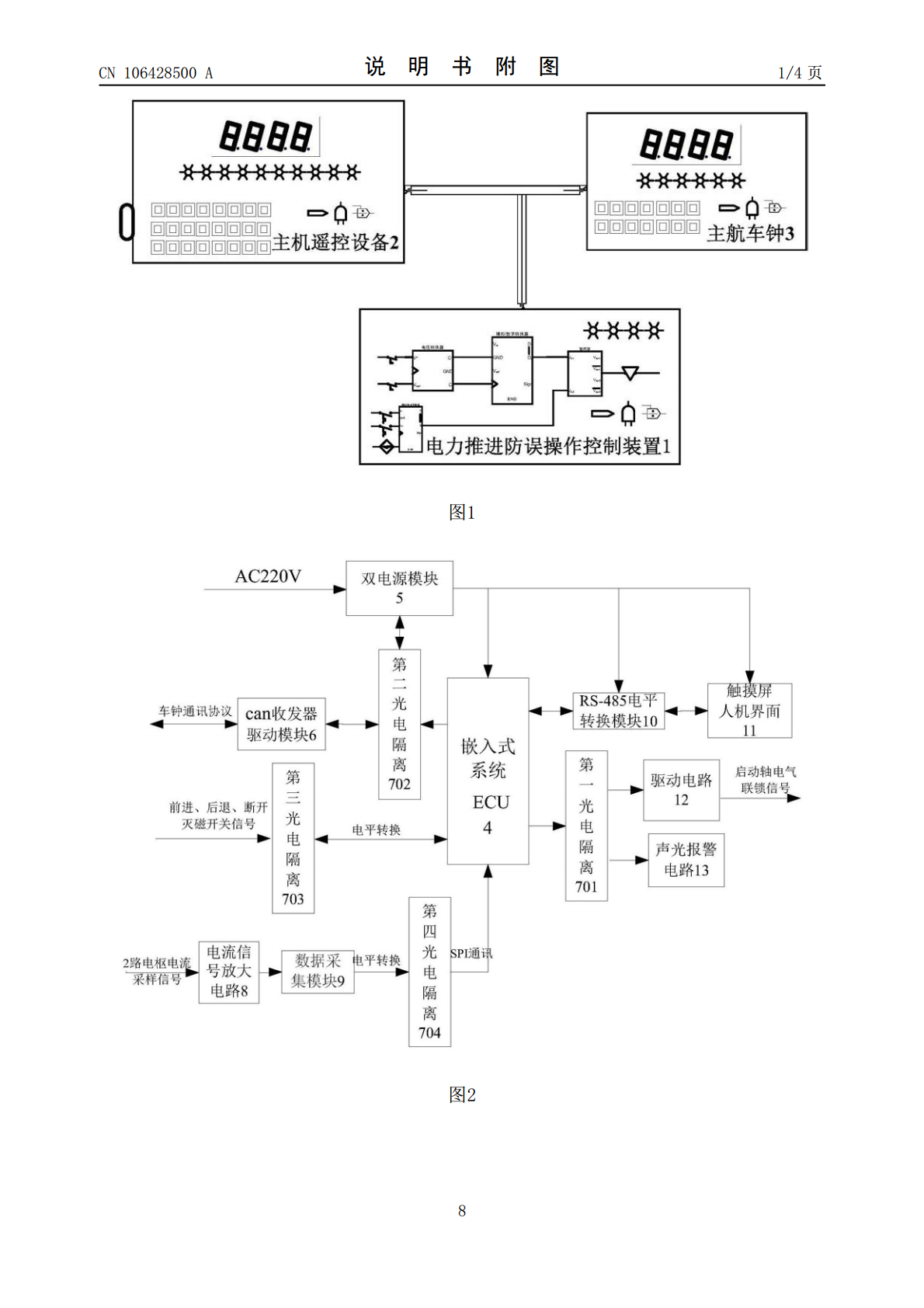
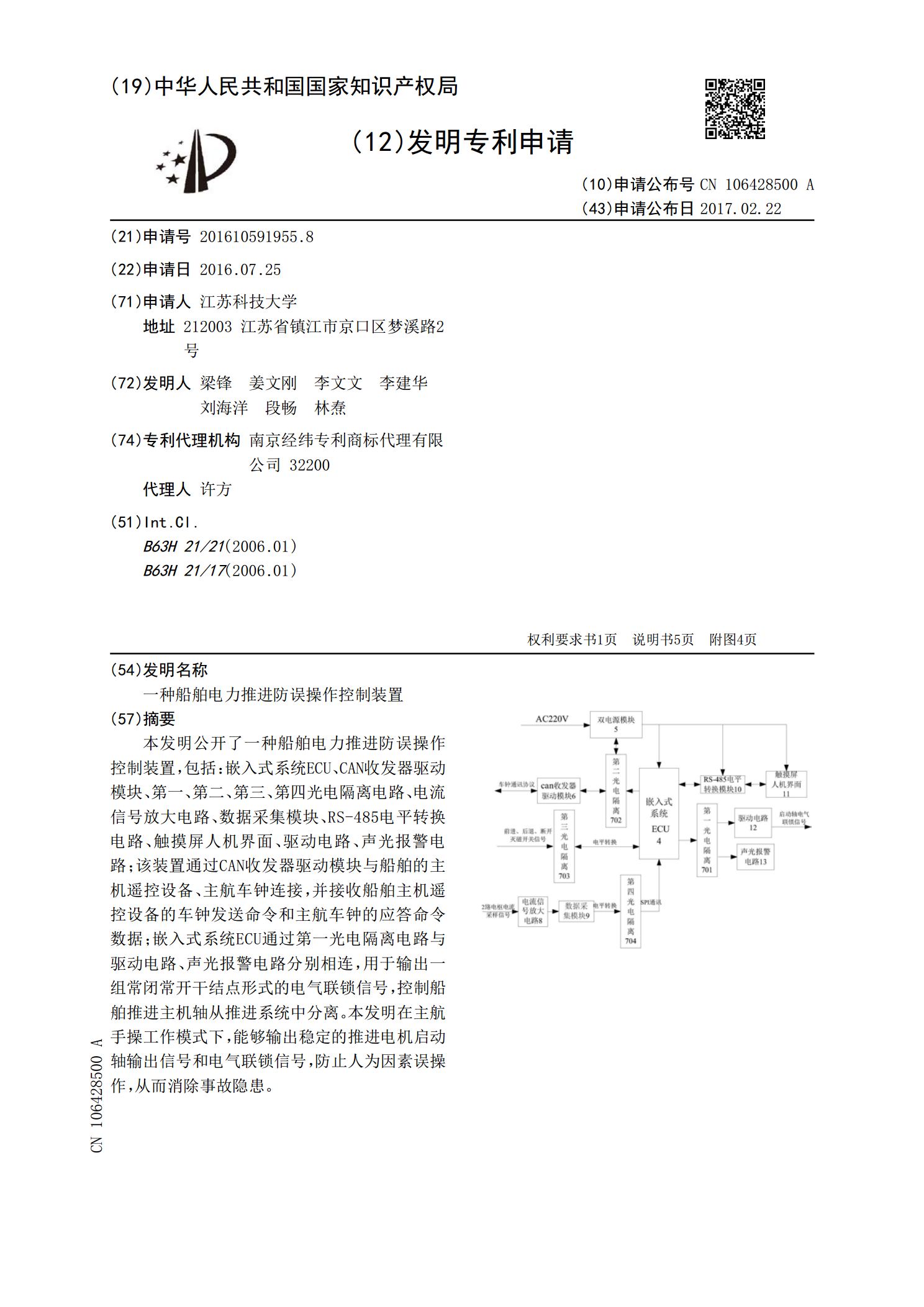
本发明公开了一种船舶电力推进防误操作控制装置,包括:嵌入式系统ECU、CAN收发器驱动模块、第一、第二、第三、第四光电隔离电路、电流信号放大电路、数据采集模块、RS‑485电平转换电路、触摸屏人机界面、驱动电路、声光报警电路;该装置通过CAN收发器驱动模块与船舶的主机遥控设备、主航车钟连接,并接收船舶主机遥控设备的车钟发送命令和主航车钟的应答命令数据;嵌入式系统ECU通过第一光电隔离电路与驱动电路、声光报警电路分别相连,用于输出一组常闭常开干结点形式的电气联锁信号,控制船舶推进主机轴从推进系统中分离。本发
一种船舶电力推进装置.pdf
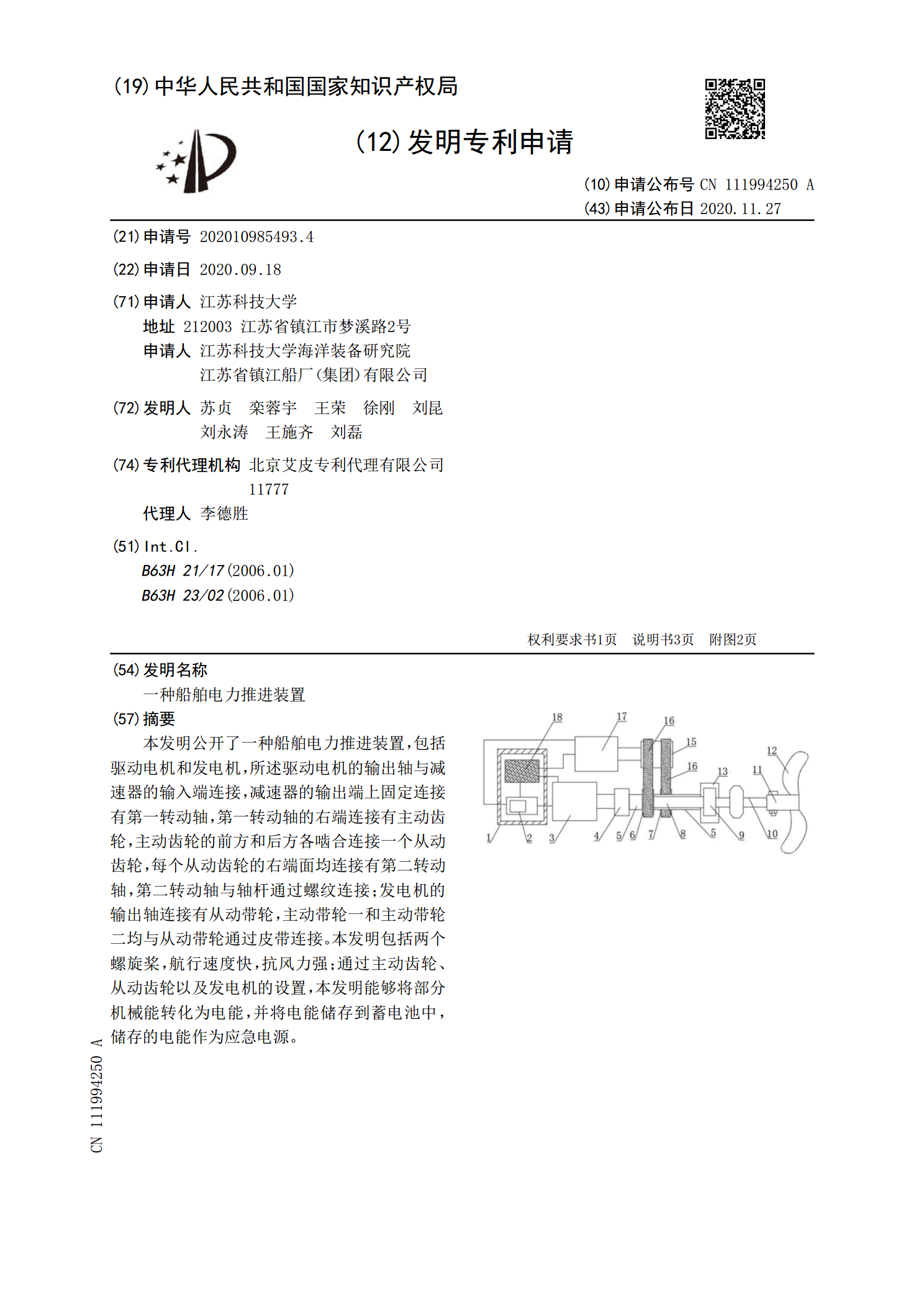
本发明公开了一种船舶电力推进装置,包括驱动电机和发电机,所述驱动电机的输出轴与减速器的输入端连接,减速器的输出端上固定连接有第一转动轴,第一转动轴的右端连接有主动齿轮,主动齿轮的前方和后方各啮合连接一个从动齿轮,每个从动齿轮的右端面均连接有第二转动轴,第二转动轴与轴杆通过螺纹连接;发电机的输出轴连接有从动带轮,主动带轮一和主动带轮二均与从动带轮通过皮带连接。本发明包括两个螺旋桨,航行速度快,抗风力强;通过主动齿轮、从动齿轮以及发电机的设置,本发明能够将部分机械能转化为电能,并将电能储存到蓄电池中,储存的电

一种电气试验防误操作控制装置.pdf
本发明提供的一种电气试验防误操作控制装置,电源盘与电源接口电连接,电源盘与电源接口之间设置有第一电压表、稳压器、第二电压表、电流表、功率表、触电保安器、遥控开关、控制开关,该方案使得控制装置具有多种功能,在实际使用过程中,维护人员可以方便地观察电压、电流及功率等参数,有利于维护人员的相关操作,并且,遥控开关和触电保安器均起到保护功能,维护人员触电后可以及时断电,提高了控制装置的安全性能,优化了控制装置的使用性能。另外,导向架和导向轮的设置可以减小电源线的磨损,延长了电源线的使用寿命,至少四个导向轮可以在多
一种风电安装用船舶电力推进系统的控制装置.pdf
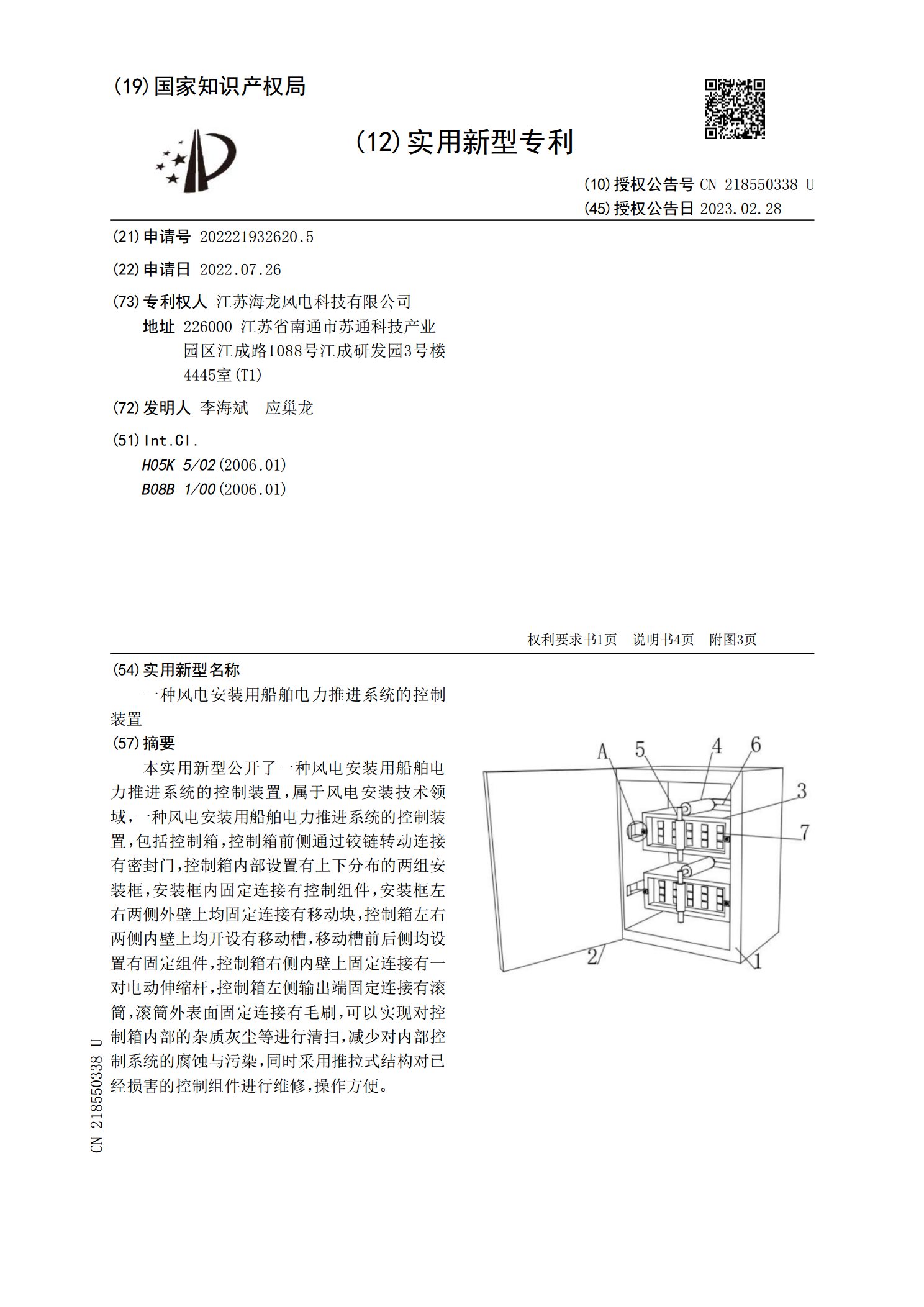
本实用新型公开了一种风电安装用船舶电力推进系统的控制装置,属于风电安装技术领域,一种风电安装用船舶电力推进系统的控制装置,包括控制箱,控制箱前侧通过铰链转动连接有密封门,控制箱内部设置有上下分布的两组安装框,安装框内固定连接有控制组件,安装框左右两侧外壁上均固定连接有移动块,控制箱左右两侧内壁上均开设有移动槽,移动槽前后侧均设置有固定组件,控制箱右侧内壁上固定连接有一对电动伸缩杆,控制箱左侧输出端固定连接有滚筒,滚筒外表面固定连接有毛刷,可以实现对控制箱内部的杂质灰尘等进行清扫,减少对内部控制系统的腐蚀与
一种内河全电力推进船舶无线充电装置.pdf
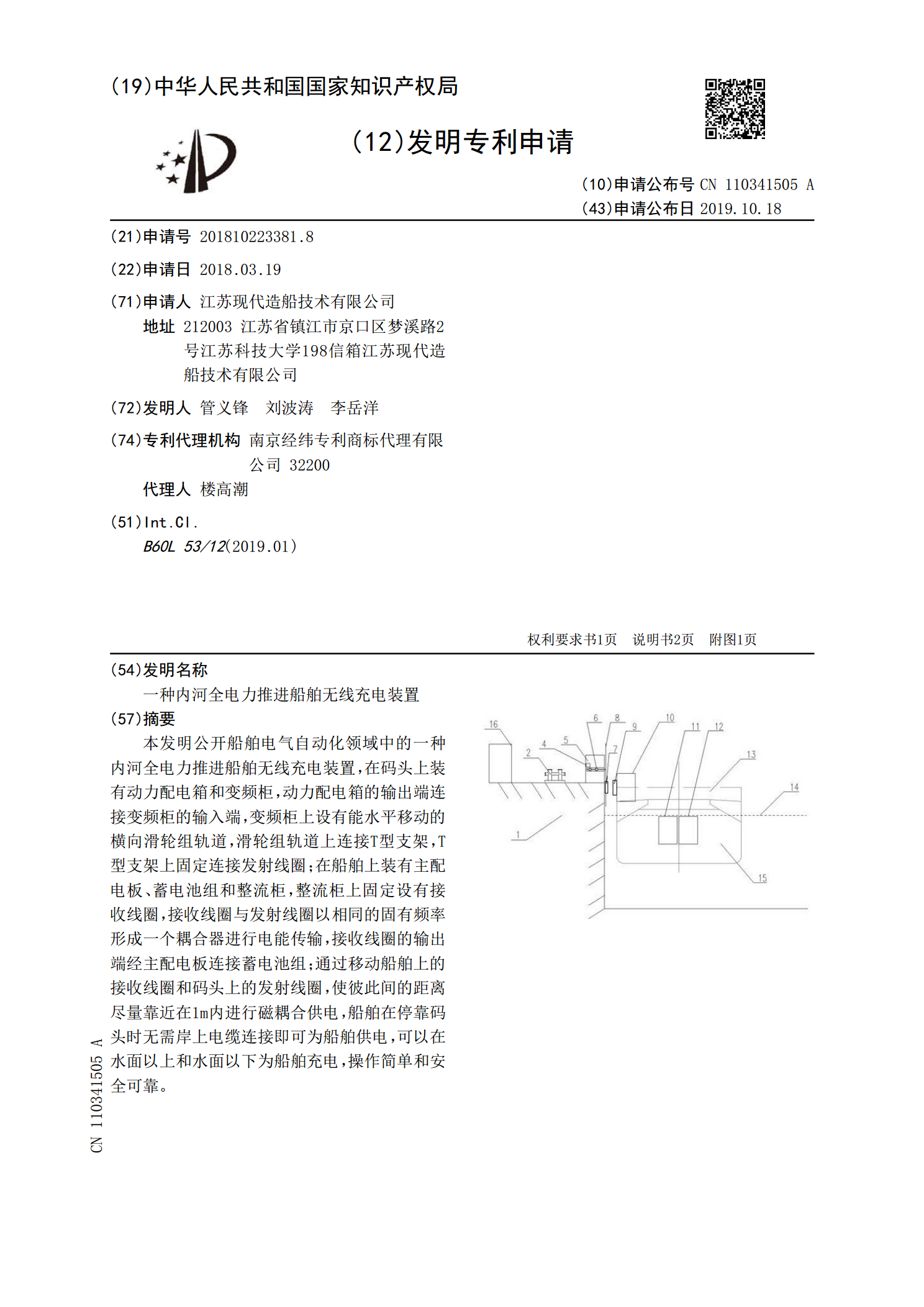
本发明公开船舶电气自动化领域中的一种内河全电力推进船舶无线充电装置,在码头上装有动力配电箱和变频柜,动力配电箱的输出端连接变频柜的输入端,变频柜上设有能水平移动的横向滑轮组轨道,滑轮组轨道上连接T型支架,T型支架上固定连接发射线圈;在船舶上装有主配电板、蓄电池组和整流柜,整流柜上固定设有接收线圈,接收线圈与发射线圈以相同的固有频率形成一个耦合器进行电能传输,接收线圈的输出端经主配电板连接蓄电池组;通过移动船舶上的接收线圈和码头上的发射线圈,使彼此间的距离尽量靠近在1m内进行磁耦合供电,船舶在停靠码头时无需