
轧钢机螺栓头部视觉分割与定位方法.pdf

努力****骞北

1/9

2/9

3/9
4/9
5/9
6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
轧钢机螺栓头部视觉分割与定位方法.pdf
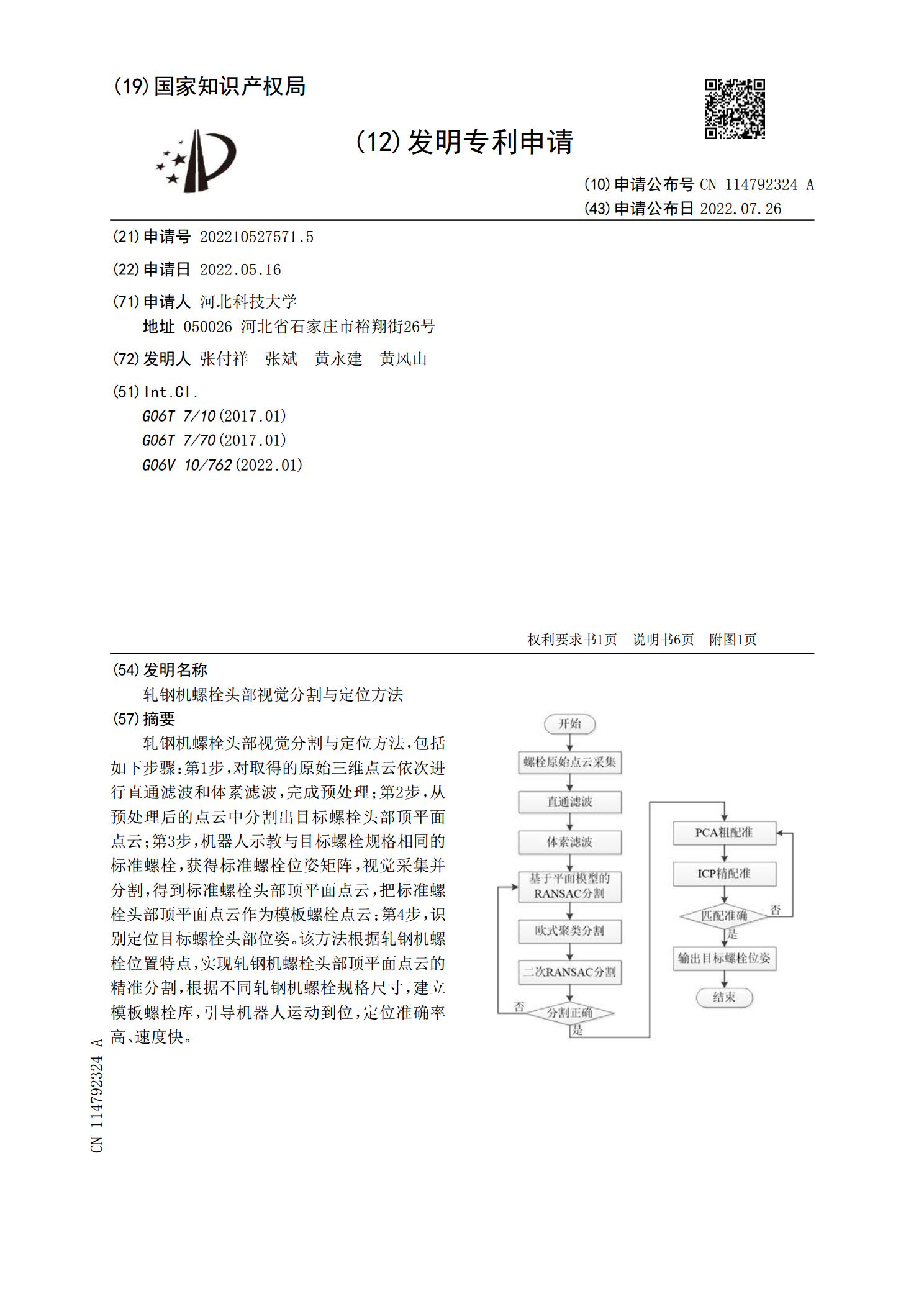
轧钢机螺栓头部视觉分割与定位方法,包括如下步骤:第1步,对取得的原始三维点云依次进行直通滤波和体素滤波,完成预处理;第2步,从预处理后的点云中分割出目标螺栓头部顶平面点云;第3步,机器人示教与目标螺栓规格相同的标准螺栓,获得标准螺栓位姿矩阵,视觉采集并分割,得到标准螺栓头部顶平面点云,把标准螺栓头部顶平面点云作为模板螺栓点云;第4步,识别定位目标螺栓头部位姿。该方法根据轧钢机螺栓位置特点,实现轧钢机螺栓头部顶平面点云的精准分割,根据不同轧钢机螺栓规格尺寸,建立模板螺栓库,引导机器人运动到位,定位准确率高、
螺栓头部方向自动定位机构.pdf
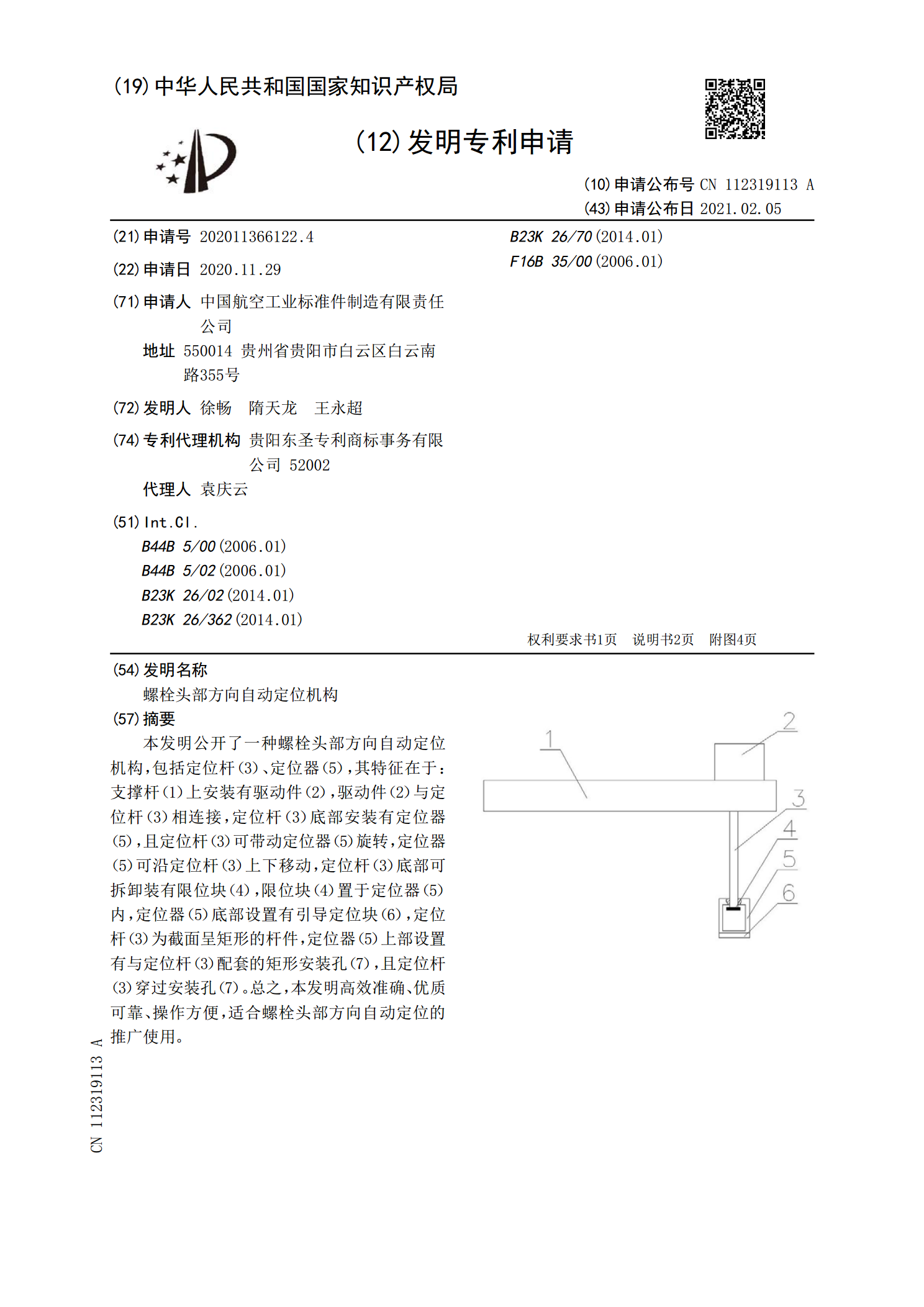
本发明公开了一种螺栓头部方向自动定位机构,包括定位杆(3)、定位器(5),其特征在于:支撑杆(1)上安装有驱动件(2),驱动件(2)与定位杆(3)相连接,定位杆(3)底部安装有定位器(5),且定位杆(3)可带动定位器(5)旋转,定位器(5)可沿定位杆(3)上下移动,定位杆(3)底部可拆卸装有限位块(4),限位块(4)置于定位器(5)内,定位器(5)底部设置有引导定位块(6),定位杆(3)为截面呈矩形的杆件,定位器(5)上部设置有与定位杆(3)配套的矩形安装孔(7),且定位杆(3)穿过安装孔(7)。总之,本

基于头部视觉的陪护机器人全局定位与物品抓取方法研究.docx
基于头部视觉的陪护机器人全局定位与物品抓取方法研究引言随着人口老龄化的不断加剧和社会的快速发展,陪护机器人越来越成为人们关注的焦点之一。陪护机器人应用于医疗、养老、教育等诸多领域,为人们提供照顾和陪伴服务。在这些应用场景下,机器人需要具备全局定位和物品抓取的能力。本文将重点研究基于头部视觉的陪护机器人全局定位和物品抓取方法。一、头部视觉感知系统设计陪护机器人的头部视觉感知系统是实现全局定位和物品抓取的重要组成部分,它主要由摄像头、IMU传感器和处理器三部分构成。1.摄像头摄像头是头部视觉感知系统中最关键的

基于双目视觉的作物点云获取与分割定位方法.docx
基于双目视觉的作物点云获取与分割定位方法基于双目视觉的作物点云获取与分割定位方法摘要:随着农业机械化的发展,农田的管理需要越来越多的自动化技术来辅助。其中,作物的点云获取与分割定位是一个重要的研究方向。本文提出了一种基于双目视觉的作物点云获取与分割定位方法,通过双目摄像头获取农田的立体图像,然后利用计算机视觉算法对图像进行处理,最终实现对作物的点云获取与分割定位。实验结果表明该方法具有较高的准确性和稳定性,能够满足农田管理的需求。关键词:双目视觉,作物,点云,获取,分割,定位1.引言作物的点云获取与分割定
避免螺栓与螺栓孔壁贴合的螺栓定位方法.pdf
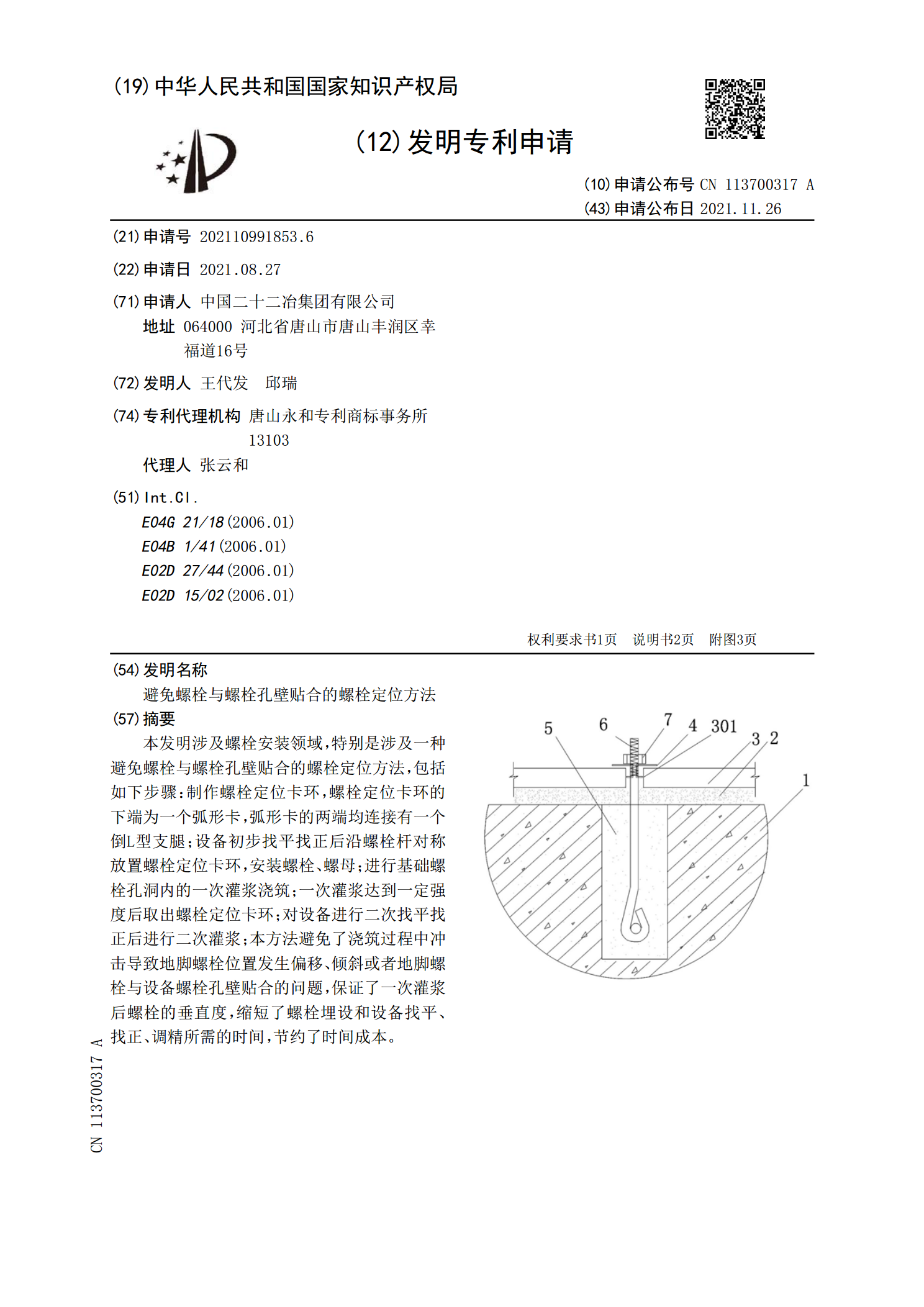
本发明涉及螺栓安装领域,特别是涉及一种避免螺栓与螺栓孔壁贴合的螺栓定位方法,包括如下步骤:制作螺栓定位卡环,螺栓定位卡环的下端为一个弧形卡,弧形卡的两端均连接有一个倒L型支腿;设备初步找平找正后沿螺栓杆对称放置螺栓定位卡环,安装螺栓、螺母;进行基础螺栓孔洞内的一次灌浆浇筑;一次灌浆达到一定强度后取出螺栓定位卡环;对设备进行二次找平找正后进行二次灌浆;本方法避免了浇筑过程中冲击导致地脚螺栓位置发生偏移、倾斜或者地脚螺栓与设备螺栓孔壁贴合的问题,保证了一次灌浆后螺栓的垂直度,缩短了螺栓埋设和设备找平、找正、调