
合页板材吸附夹具.pdf

是来****文章


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

合页板材吸附夹具.pdf
本实用新型涉及真空夹具设计领域,公开一种合页板材吸附夹具,包括与机器人连接的主体架;主体架朝向地面的底部端面上连接不止一个真空吸附组件;真空吸附组件上设置有真空吸盘;主体架底部端面上还连接不仅仅一组旋转夹紧气缸,旋转夹紧气缸对称分在真空吸附组件两侧;旋转夹紧气缸上连接有连接臂。利用真空吸附组件上吸盘吸附合页板材第一块板,同时利用旋转夹紧气缸上的连接臂将合页板材的第二块板从底部顶住从而使得合页板材的两块板材都能够固定,避免吊运过程中的摇摆、晃动;同时,利用连接臂使得吊运过程中合页板材两块板的夹角几乎为零,从

车身合页铣底面夹具.pdf
本实用新型公开了车身合页铣底面夹具,包括矩形的块体,所述块体底部两侧对称的设有与车身合页仿形的卡槽,所述块体设有竖向的圆孔,圆孔的下端与卡槽连通,所述圆孔的上部固定连接有导套,所述导套中插接有贯穿的连接杆,连接杆的下端固定连接有压块,压块与圆孔的内腔滑动连接,压块的底部设有仿形面以与车身合页贴合,压块的上侧与导套之间连接有弹簧,弹簧对压块施加向下的压力。每个夹具分别设有两个与合页仿形的卡槽,合页在装夹状态时,由弹簧推动压块压在合页上对其进行固定,避免在加工合页底面时出现晃动,向上扳动手柄可以解除对合页的固

一种板材合页座的加工制作方法.pdf
本发明涉及板材合页座技术领域,尤其涉及一种板材合页座的加工制作方法。本发明通过采用刨砂、裁方以及整修等工艺方法,可以根据实际需要对板材进行裁切和使用,能够避免传统工艺下数控机床设备加工所带来的板材浪费的问题,从而能够极大的提高单块板材的利用率;本发明通过利用两次打眼和一次锯切的步骤,使得一块板材可以同时制作出多个合页座,达到了节约生产成本的目的,符合节约资源的环保理念。
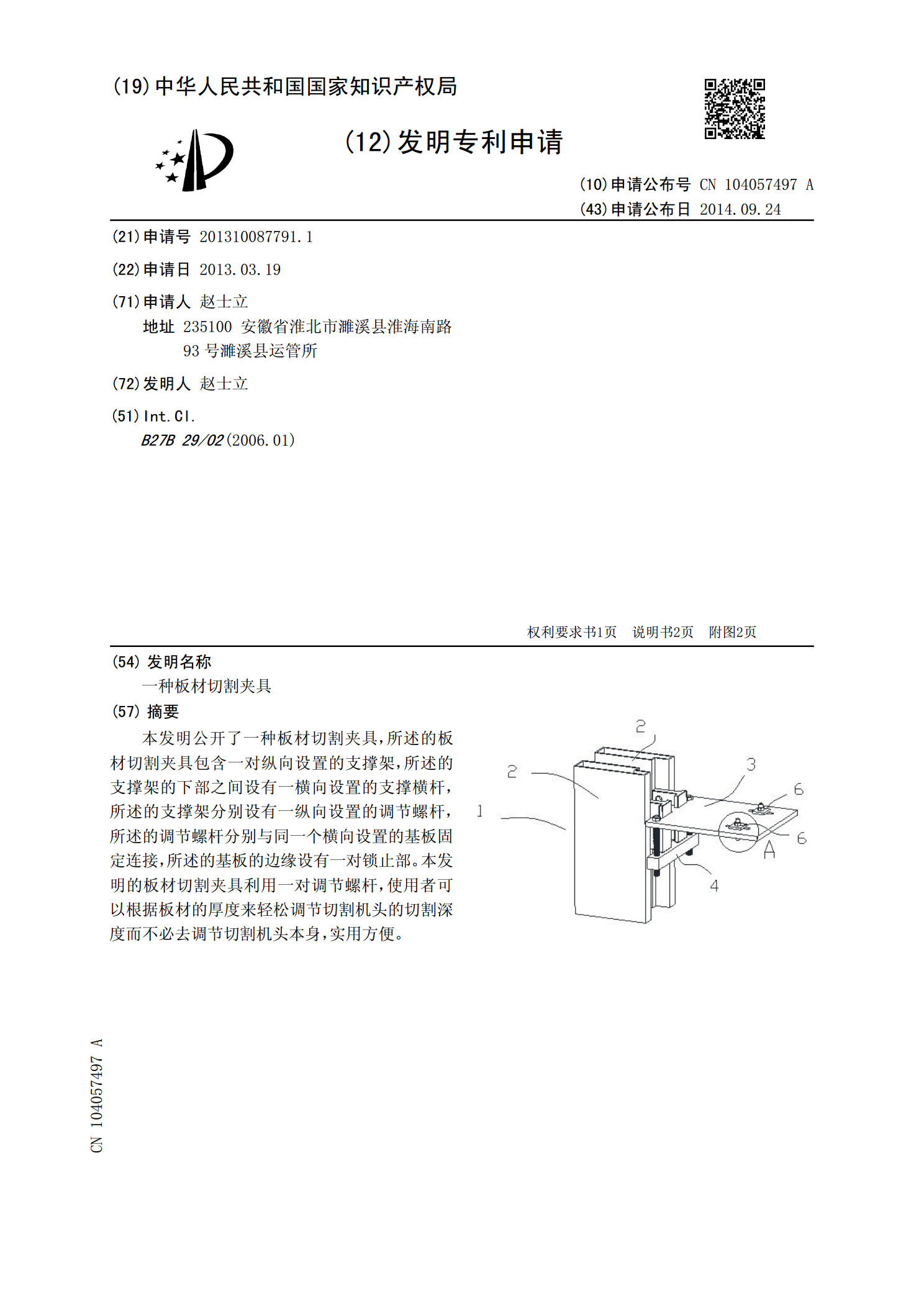
一种板材切割夹具.pdf
本发明公开了一种板材切割夹具,所述的板材切割夹具包含一对纵向设置的支撑架,所述的支撑架的下部之间设有一横向设置的支撑横杆,所述的支撑架分别设有一纵向设置的调节螺杆,所述的调节螺杆分别与同一个横向设置的基板固定连接,所述的基板的边缘设有一对锁止部。本发明的板材切割夹具利用一对调节螺杆,使用者可以根据板材的厚度来轻松调节切割机头的切割深度而不必去调节切割机头本身,实用方便。
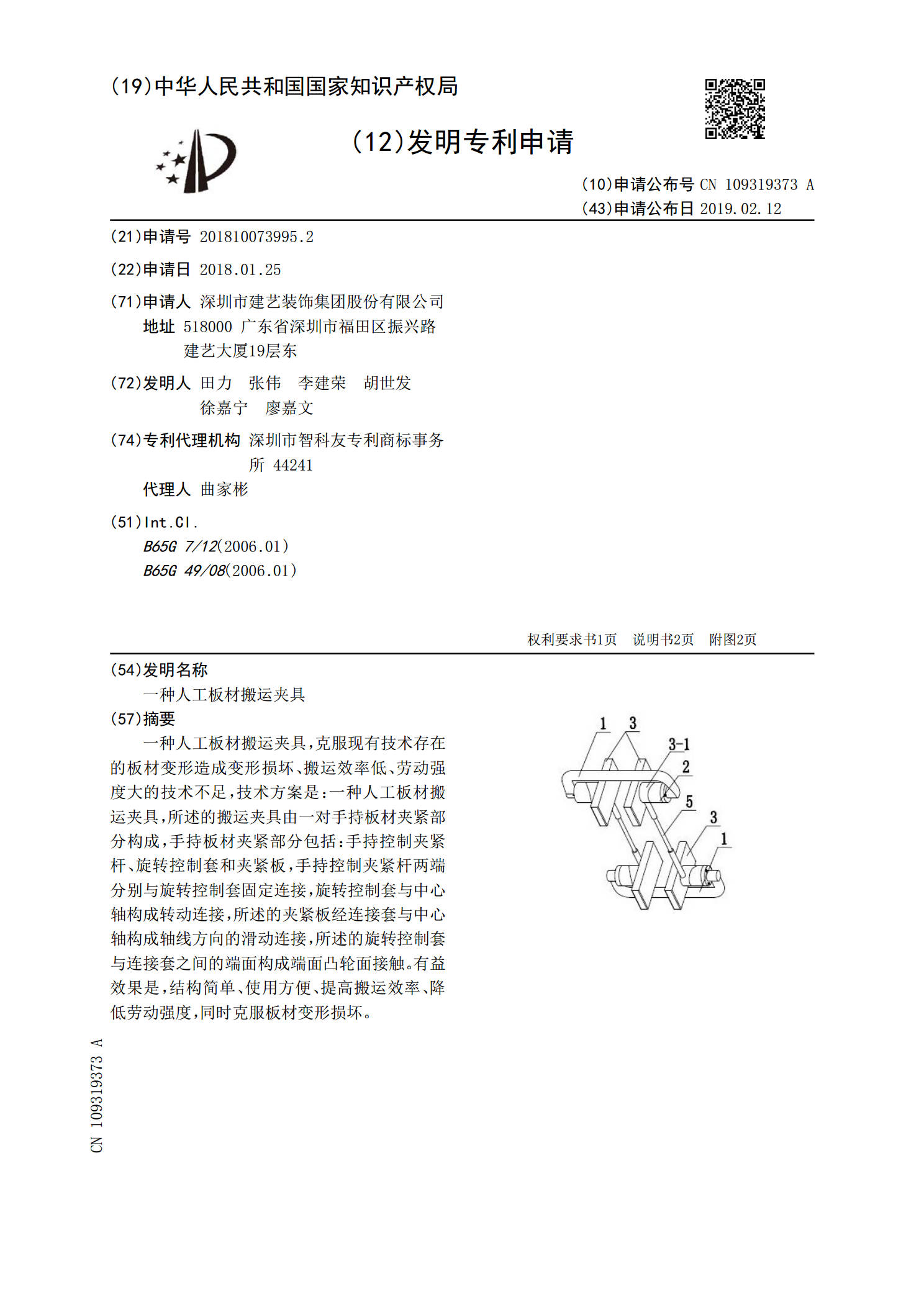
一种人工板材搬运夹具.pdf
一种人工板材搬运夹具,克服现有技术存在的板材变形造成变形损坏、搬运效率低、劳动强度大的技术不足,技术方案是:一种人工板材搬运夹具,所述的搬运夹具由一对手持板材夹紧部分构成,手持板材夹紧部分包括:手持控制夹紧杆、旋转控制套和夹紧板,手持控制夹紧杆两端分别与旋转控制套固定连接,旋转控制套与中心轴构成转动连接,所述的夹紧板经连接套与中心轴构成轴线方向的滑动连接,所述的旋转控制套与连接套之间的端面构成端面凸轮面接触。有益效果是,结构简单、使用方便、提高搬运效率、降低劳动强度,同时克服板材变形损坏。