
一种关节机器人精度标定装置.pdf

猫巷****永安

1/10

2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种关节机器人精度标定装置.pdf
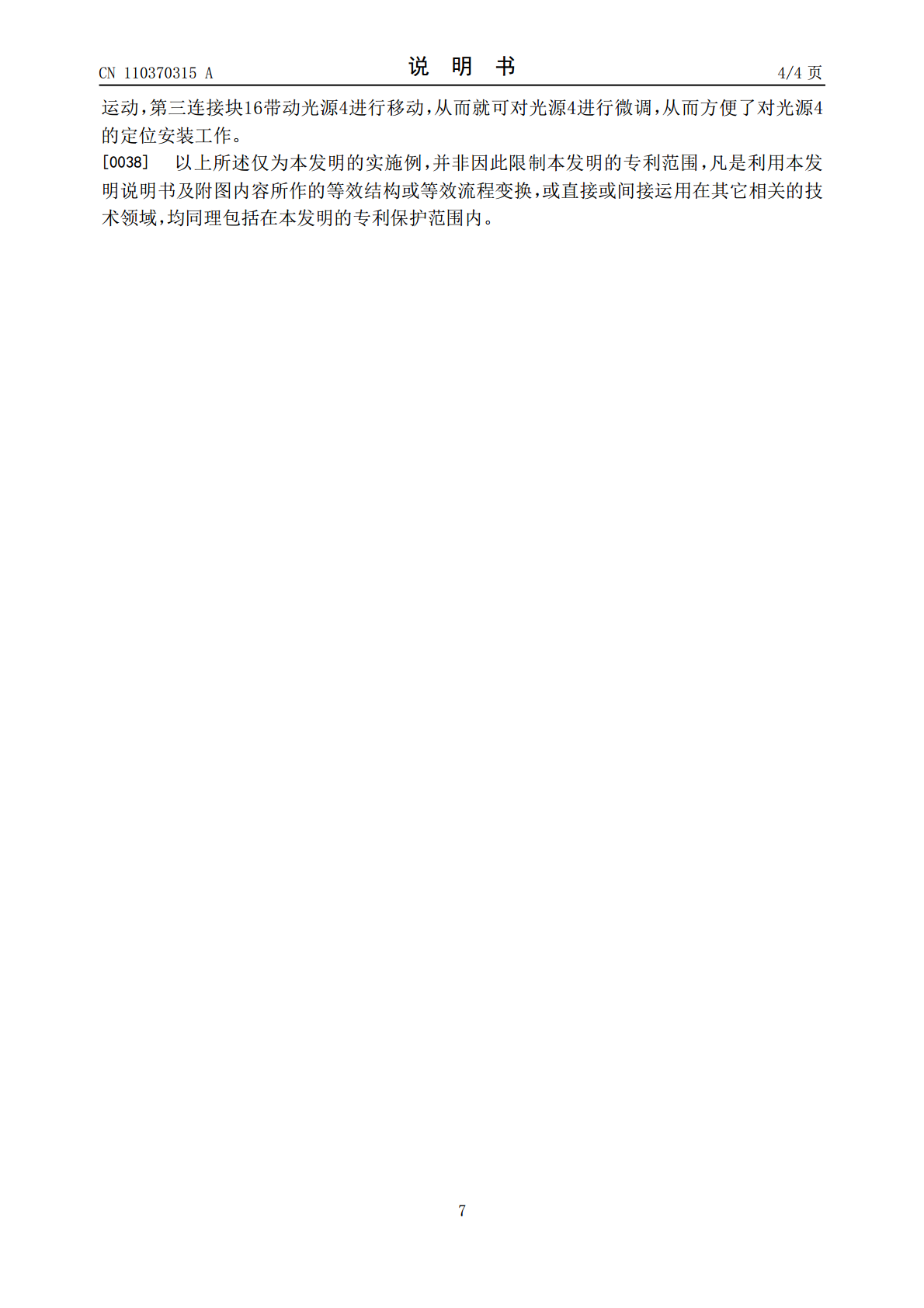
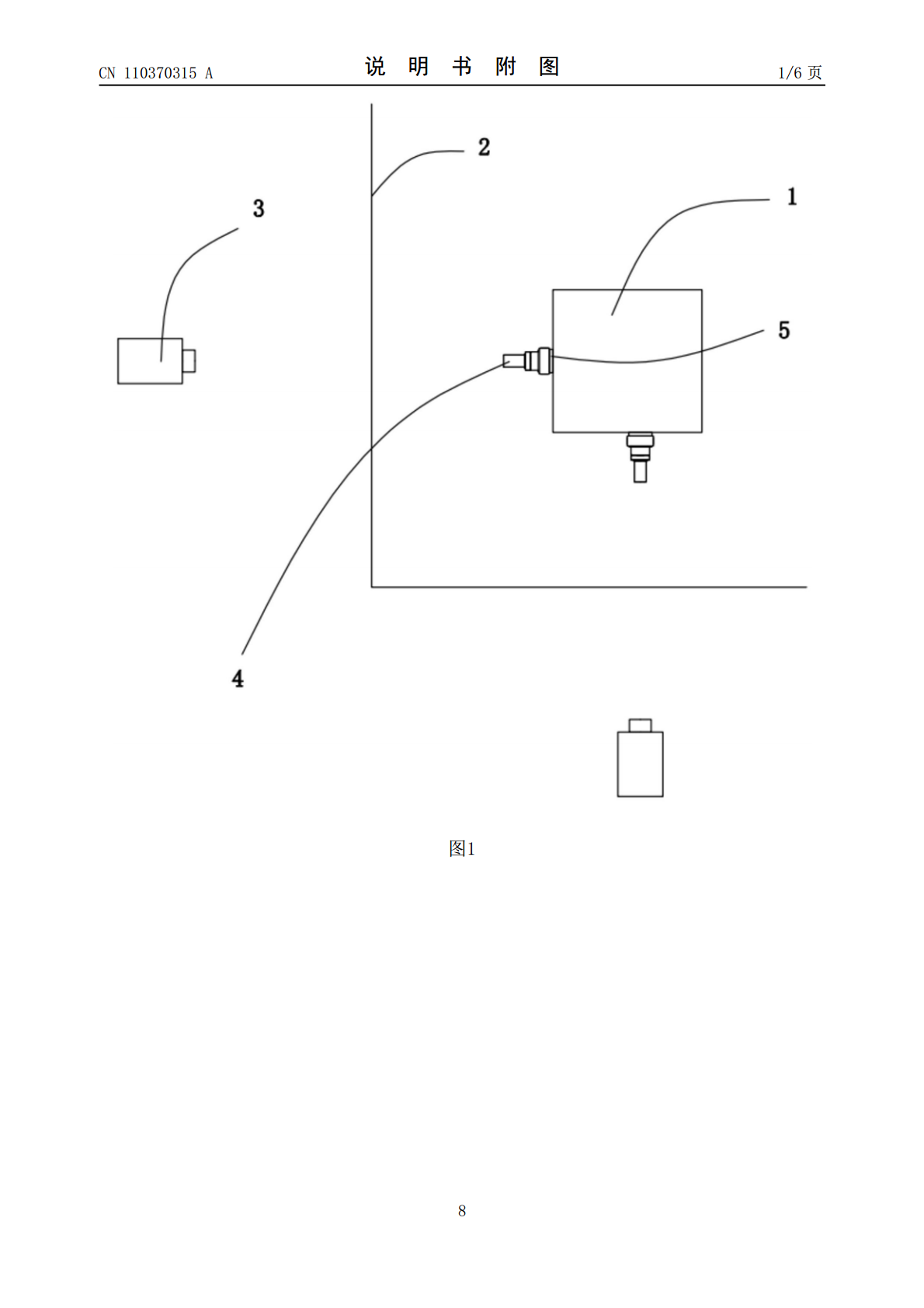
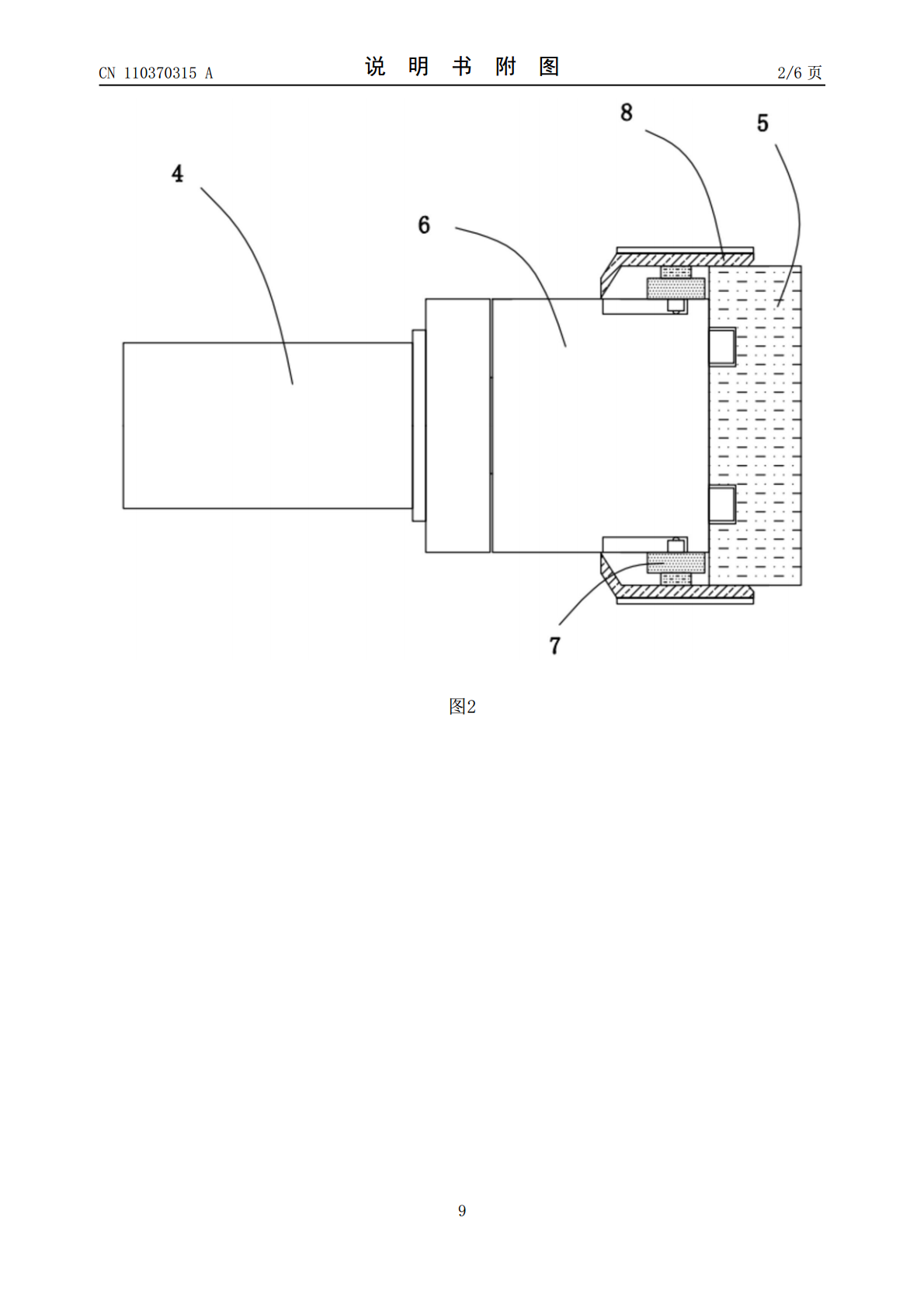
本发明提供一种关节机器人精度标定装置。关节机器人精度标定装置,包括:机器人;两个幕布,两个所述幕布分别位于所述机器人的两侧;两个相机,两个所述相机分别与两个所述幕布相适配;两个光源,两个所述光源均位于所述机器人上;两个支撑座,两个所述支撑座分别与两个所述光源相连接,且两个所述支撑座均与所述机器人固定连接;两个安装座,两个所述安装座分别与两个所述支撑座相连接,且所述安装座与相对应的所述光源相连接;两个第一支撑管,两个所述第一支撑管分别滑动套设在两个所述安装座的外侧,本发明提供的关节机器人精度标定装置具有使用
一种关节机器人精度调节装置.pdf
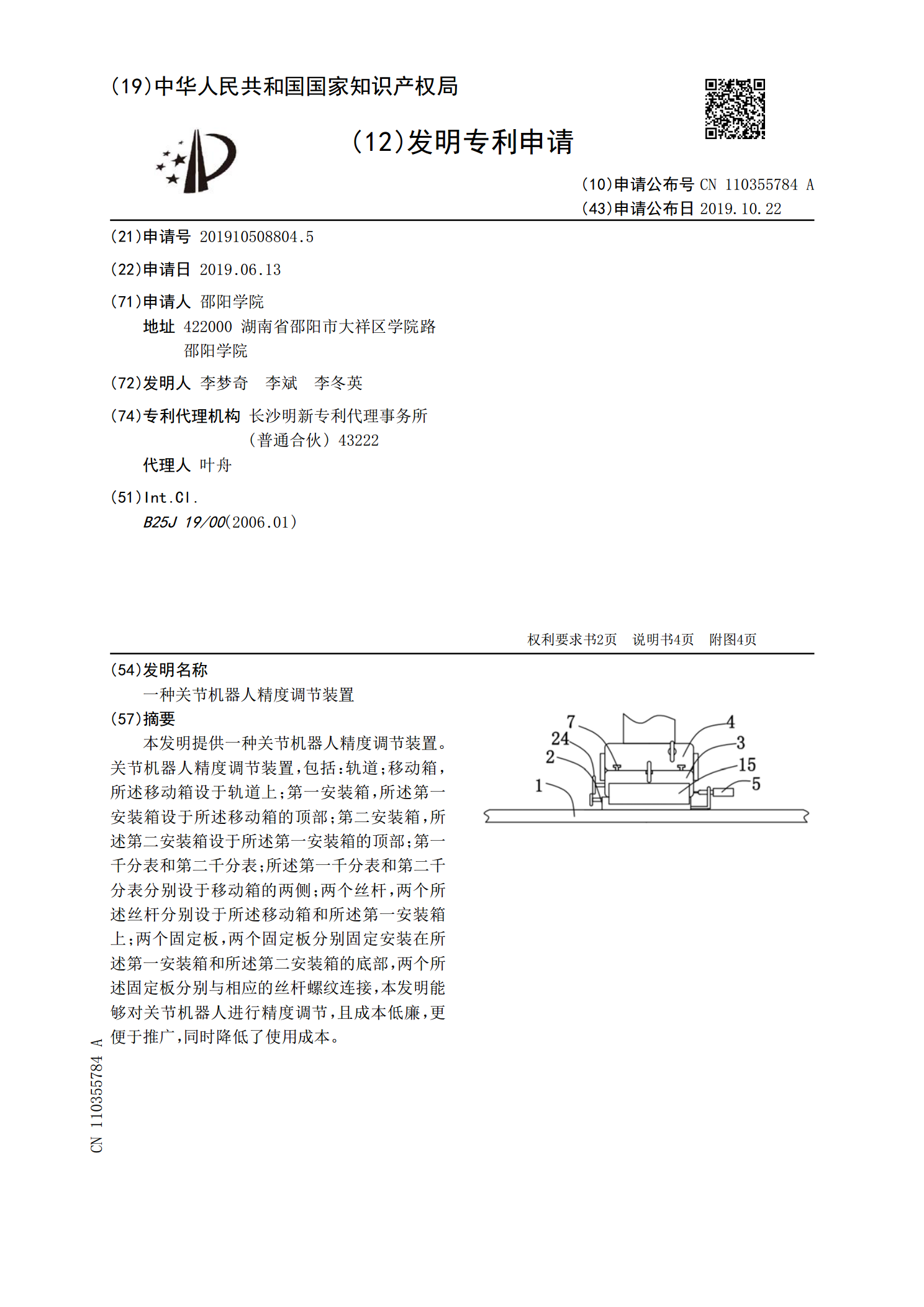
本发明提供一种关节机器人精度调节装置。关节机器人精度调节装置,包括:轨道;移动箱,所述移动箱设于轨道上;第一安装箱,所述第一安装箱设于所述移动箱的顶部;第二安装箱,所述第二安装箱设于所述第一安装箱的顶部;第一千分表和第二千分表;所述第一千分表和第二千分表分别设于移动箱的两侧;两个丝杆,两个所述丝杆分别设于所述移动箱和所述第一安装箱上;两个固定板,两个固定板分别固定安装在所述第一安装箱和所述第二安装箱的底部,两个所述固定板分别与相应的丝杆螺纹连接,本发明能够对关节机器人进行精度调节,且成本低廉,更便于推广,

机器人关节角度测量装置的设计及标定方法.docx
机器人关节角度测量装置的设计及标定方法标题:机器人关节角度测量装置的设计及标定方法摘要:随着机器人技术的快速发展,对于机器人关节角度的精准测量日益成为研究的热点之一。本文针对机器人关节角度测量装置的设计与标定方法展开研究,提出了一种基于传感器的角度测量方案,并给出了详细的标定流程和方法。使用这种装置可以实现对机器人关节角度的高精度测量,为机器人的运动控制提供了重要的数据支持。关键词:机器人;关节角度测量;装置设计;标定方法;传感器1.引言机器人的关节角度测量是机器人运动控制中的重要环节,对于机器人操作的精

基于最小二乘法的关节机器人定位精度标定方法.docx
基于最小二乘法的关节机器人定位精度标定方法Title:AMethodforJointRobotCalibrationBasedontheLeastSquaresEstimationforPositioningAccuracyAbstract:Thispaperintroducesamethodforcalibratingthepositioningaccuracyofajointrobotusingtheleastsquaresestimationtechnique.Roboticmanipulators

一种标定多普勒海流计测速精度的装置.pdf
本发明提供一种标定多普勒海流计测速精度的装置,包括直立管、圆管、薄膜、锁紧环、格栅、吸流管、蠕动泵、出流管、控制电路、支架,直立管穿过立式循环水槽工作段的上部,圆管位于直立管的侧部,薄膜位于圆管的前部,锁紧环位于薄膜的外侧,格栅位于直立管的外部,吸流管位于薄膜的前部,蠕动泵的一端连接吸流管,蠕动泵的另一端连接出流管,控制电路连接蠕动泵的电源开关,支架位于直立管的内部;该标定多普勒海流计测速精度的装置,利用薄膜隔离水流对多普勒海流计的冲击,利用主动吸流技术减少薄膜前部的较高脉动压力,解决在测试过程中因多普勒