
一种LED自适应汽车前照灯控制系统及控制方法.pdf

佳晨****ng

1/6
2/6

3/6
4/6
5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种LED自适应汽车前照灯控制系统及控制方法.pdf
本发明涉及汽车的照明系统智能控制技术领域,尤其涉及一种LED自适应汽车前照灯控制系统,包括图像处理器、控制单元、左照明单元和右照明单元,控制单元包括CAN收发器、LDO稳压单元、MCU控制器、左LED驱动芯片、恒流回路控制模块和右LED驱动芯片,左照明单元为左LED光源模组,右照明单元为右LED光源模组,左LED光源模组和右LED光源模组均由矩阵式LED光源组成。本发明将ADB技术和LED光源矩阵技术相结合,用全电控调节方式替代了现有的机械调节方式,通过电子控制的方式来控制LED灯珠的亮或灭,实现自适应调

一种矩阵式LED自适应汽车前照灯控制系统及方法.pdf
本发明属于汽车电子照明智能控制领域,具体涉及一种矩阵式LED自适应汽车前照灯控制系统及方法,系统包括:将采集的汽车外部图像转化成控制报文的外部图像处理器;CAN收发器;接收外部图像处理器发送的控制报文的微控制器;LED驱动芯片;微控制器对控制报文解析和计算,将计算结果进行协议转换后发送给LED驱动芯片。控制方法为:S1、控制系统自检;S2、外部图像处理器发送控制报文,使微控制器发出命令将LED光源矩阵按顺序点亮;S3、前照灯进入正常工作模式,分为主流程和子流程。本发明精度高,寿命长,能够对LED驱动芯片和

汽车前照灯弯道自适应控制系统及其控制方法.pdf
本发明提供了一种汽车前照灯弯道自适应控制系统及其控制方法,方向盘带动转角传感器转动产生变化的磁场,位置传感器通过感受变化的磁场获取汽车方向盘的转动角度,从而判定车轮的转动角度,并由微处理器自动控制前照灯随车轮的转弯而同步转动,解决了夜间行驶在转弯时弯道内侧待转方向形成“视觉盲区”而产生的安全隐患,提高了夜间行车的安全性,系统简单,可靠性高。
一种汽车前照灯弯道自适应控制的方法.pdf
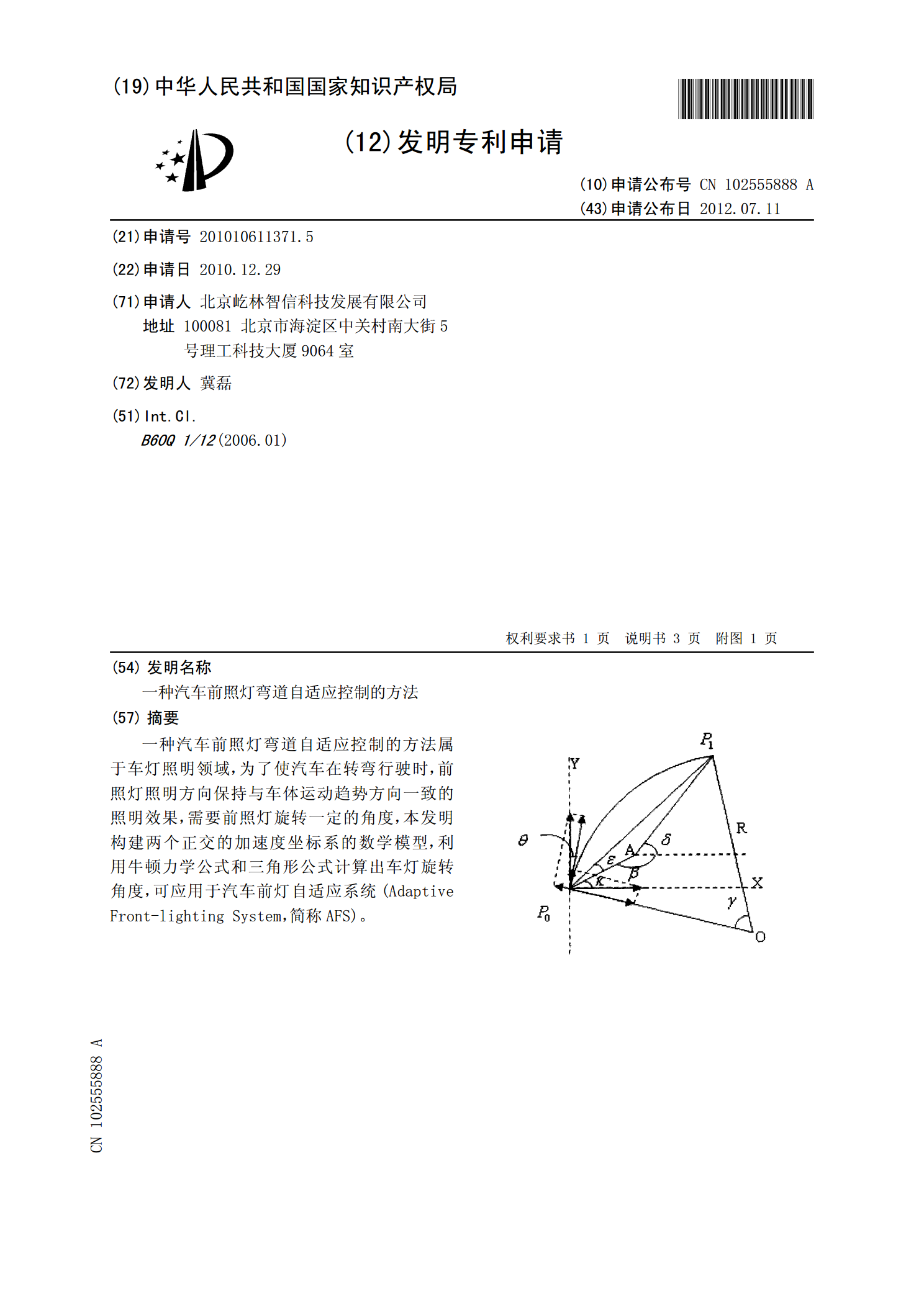
一种汽车前照灯弯道自适应控制的方法属于车灯照明领域,为了使汽车在转弯行驶时,前照灯照明方向保持与车体运动趋势方向一致的照明效果,需要前照灯旋转一定的角度,本发明构建两个正交的加速度坐标系的数学模型,利用牛顿力学公式和三角形公式计算出车灯旋转角度,可应用于汽车前灯自适应系统(Adaptive?Front-lighting?System,简称AFS)。

自适应控制的汽车前照灯结构及控制方法.pdf
本发明公开一种自适应控制的汽车前照灯结构及控制方法,灯座左右两侧面上各固定连接一根第一转轴,每个六棱柱沉孔底部处设有一个六棱柱状的电磁铁,第二转轴和第三转轴的圆柱形深孔底部分别同轴固定连接一个横截面为三角形的伸缩杆,伸缩杆同轴固定连接外形呈六棱柱的衔铁,第三转轴外同轴套有和第一齿轮相啮合的第二齿轮,第一齿轮同轴套在第四转轴外,第一齿轮正下方是摆锤,右侧的第一转轴右端外同轴固定套有第一锥齿轮,第一锥齿轮与中心轴前后水平的第二锥齿轮相啮合,第一锥齿轮固定连接步进电机的输出轴,第二转轴和第三转轴外套接轴承,第二