
一种基于磁场的水下仿生动力推进装置.pdf

An****99

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于磁场的水下仿生动力推进装置.pdf
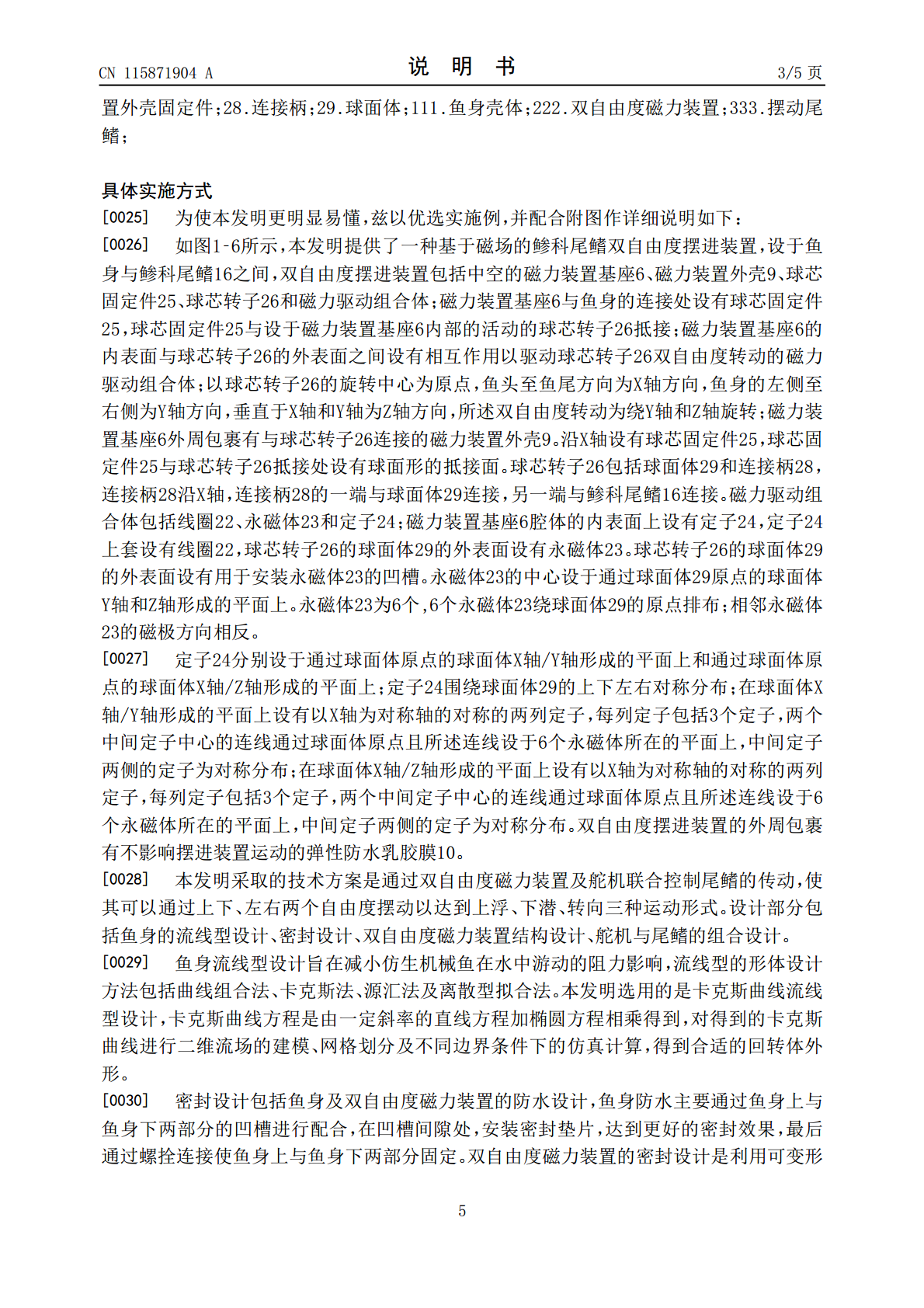
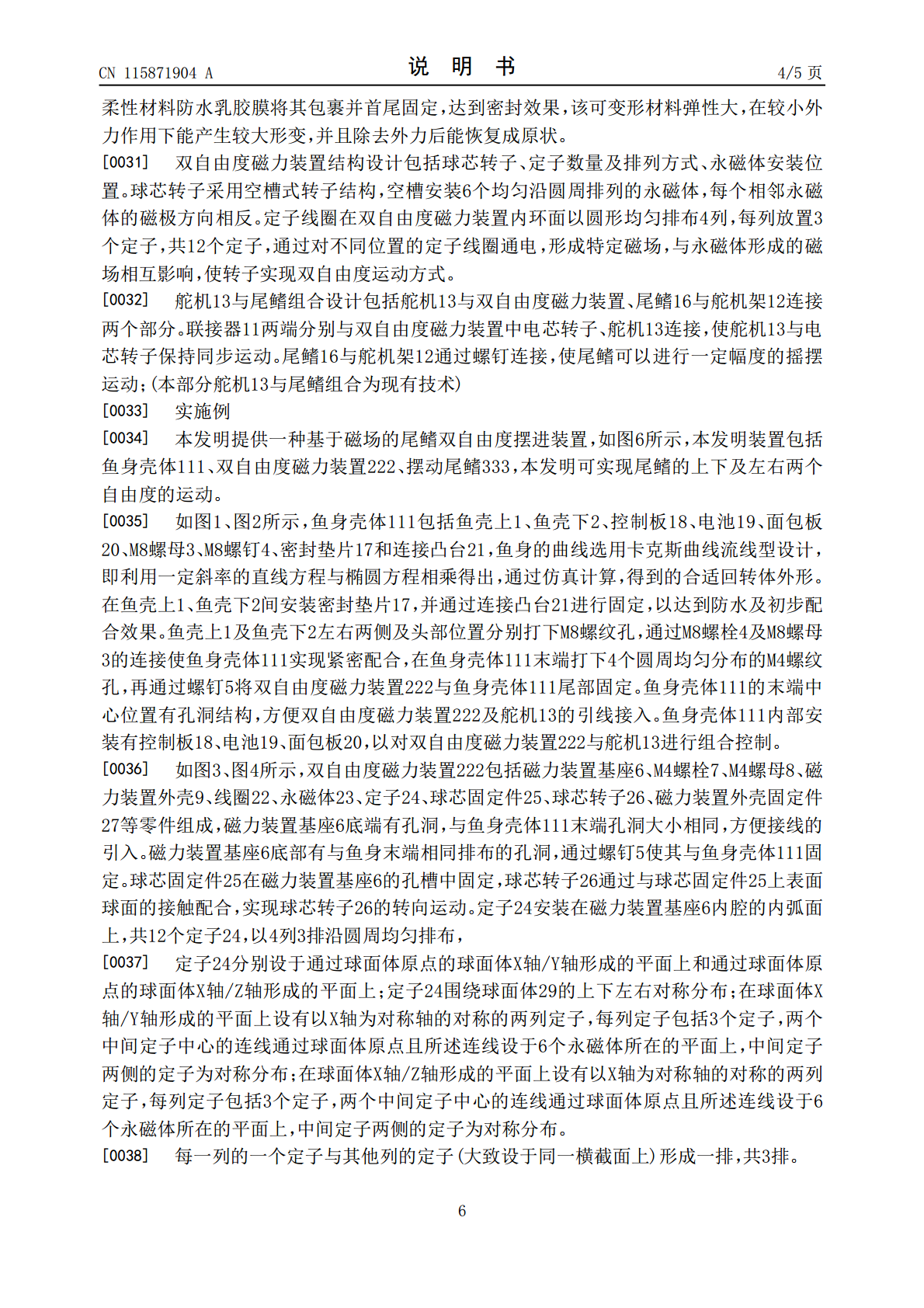
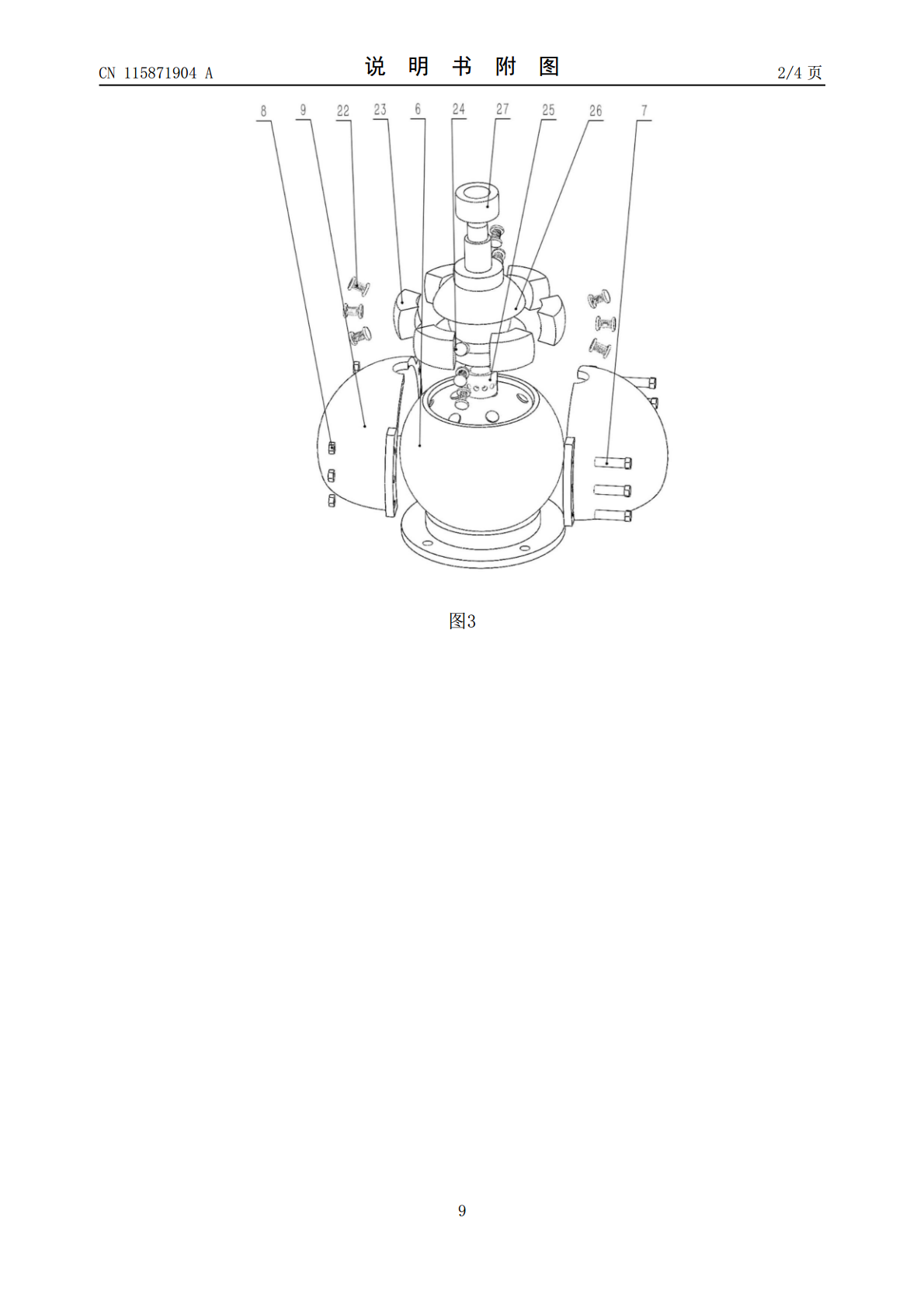
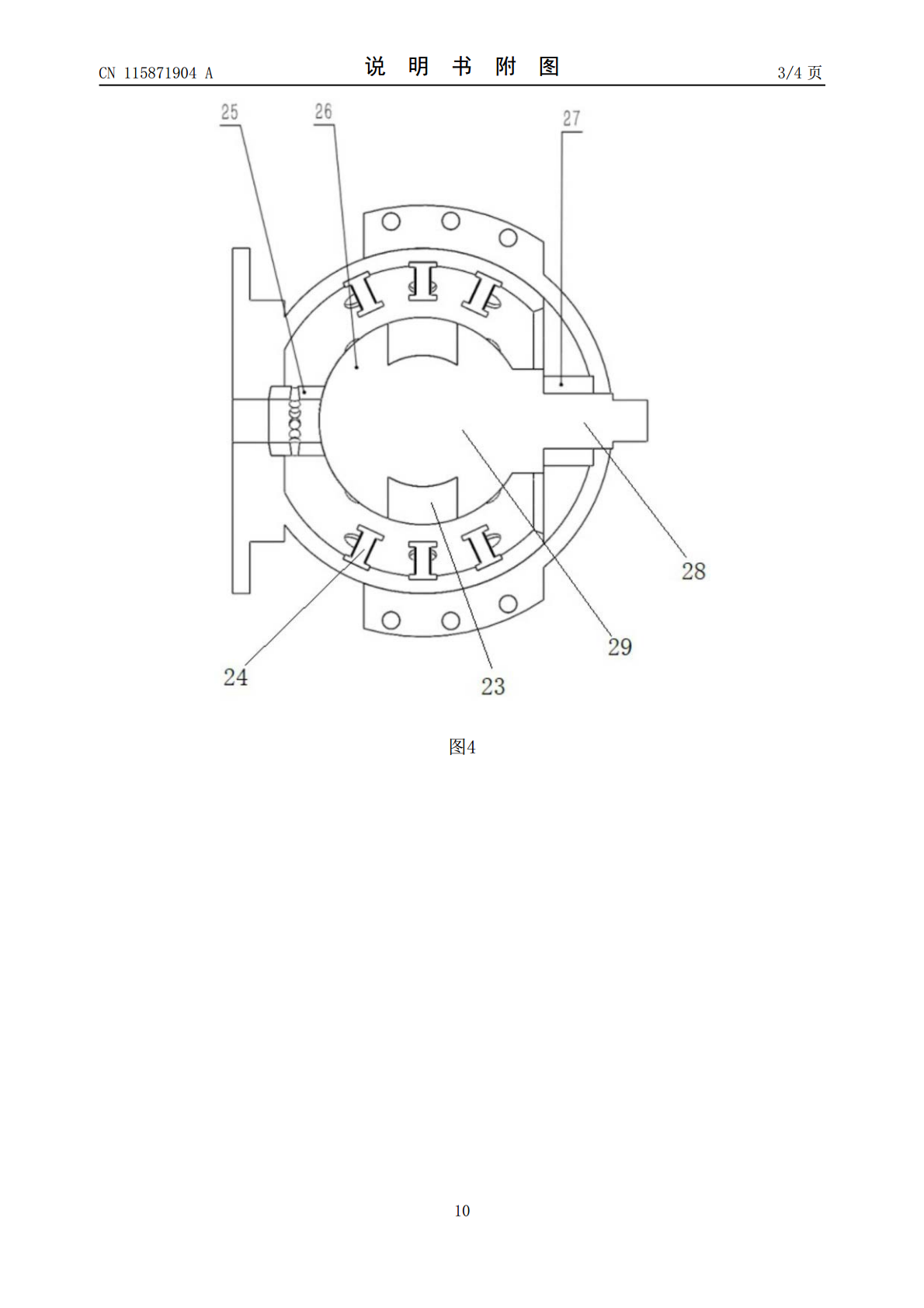
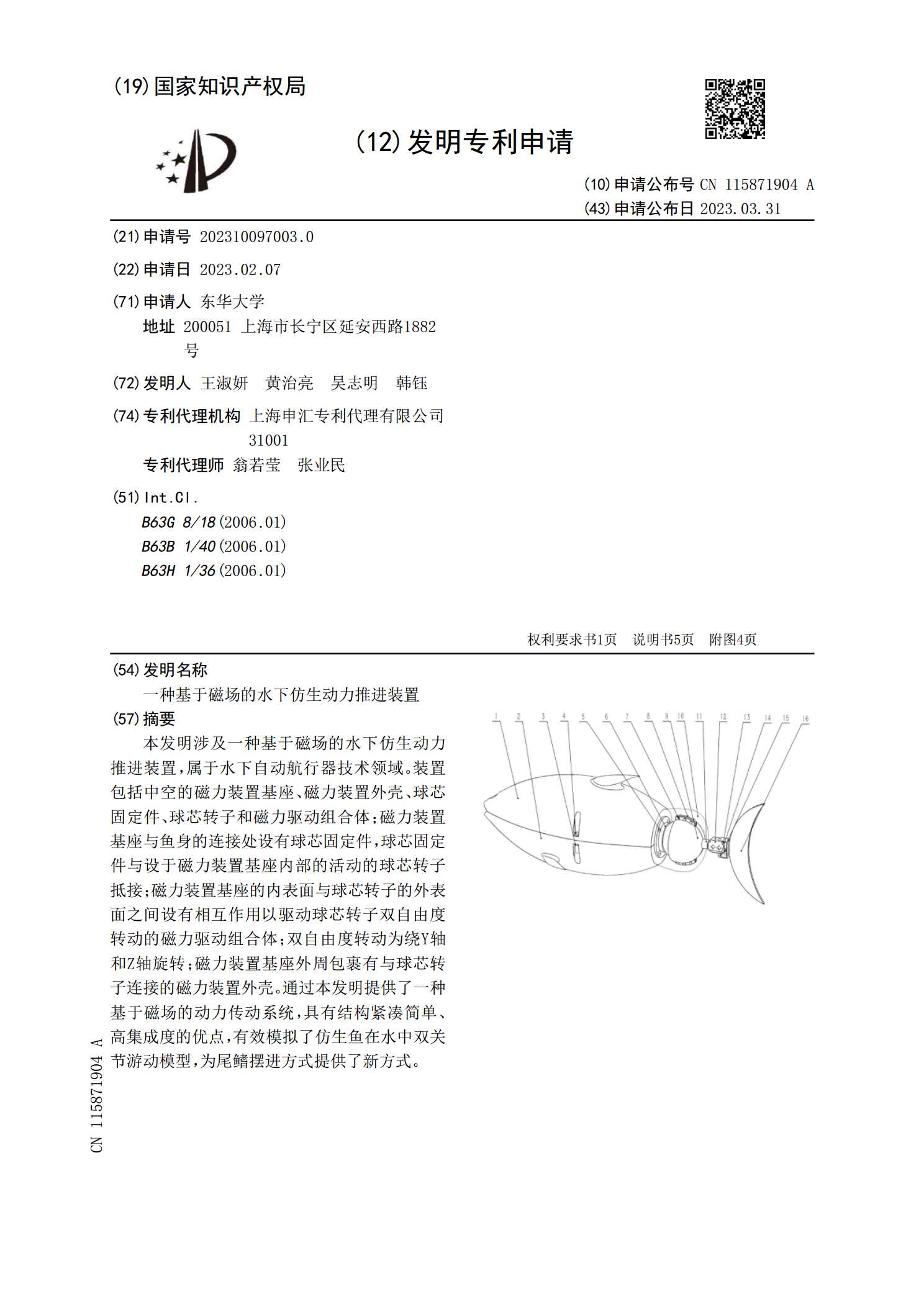
本发明涉及一种基于磁场的水下仿生动力推进装置,属于水下自动航行器技术领域。装置包括中空的磁力装置基座、磁力装置外壳、球芯固定件、球芯转子和磁力驱动组合体;磁力装置基座与鱼身的连接处设有球芯固定件,球芯固定件与设于磁力装置基座内部的活动的球芯转子抵接;磁力装置基座的内表面与球芯转子的外表面之间设有相互作用以驱动球芯转子双自由度转动的磁力驱动组合体;双自由度转动为绕Y轴和Z轴旋转;磁力装置基座外周包裹有与球芯转子连接的磁力装置外壳。通过本发明提供了一种基于磁场的动力传动系统,具有结构紧凑简单、高集成度的优点,
一种基于蝠鲼仿生水下扑翼推进装置.pdf
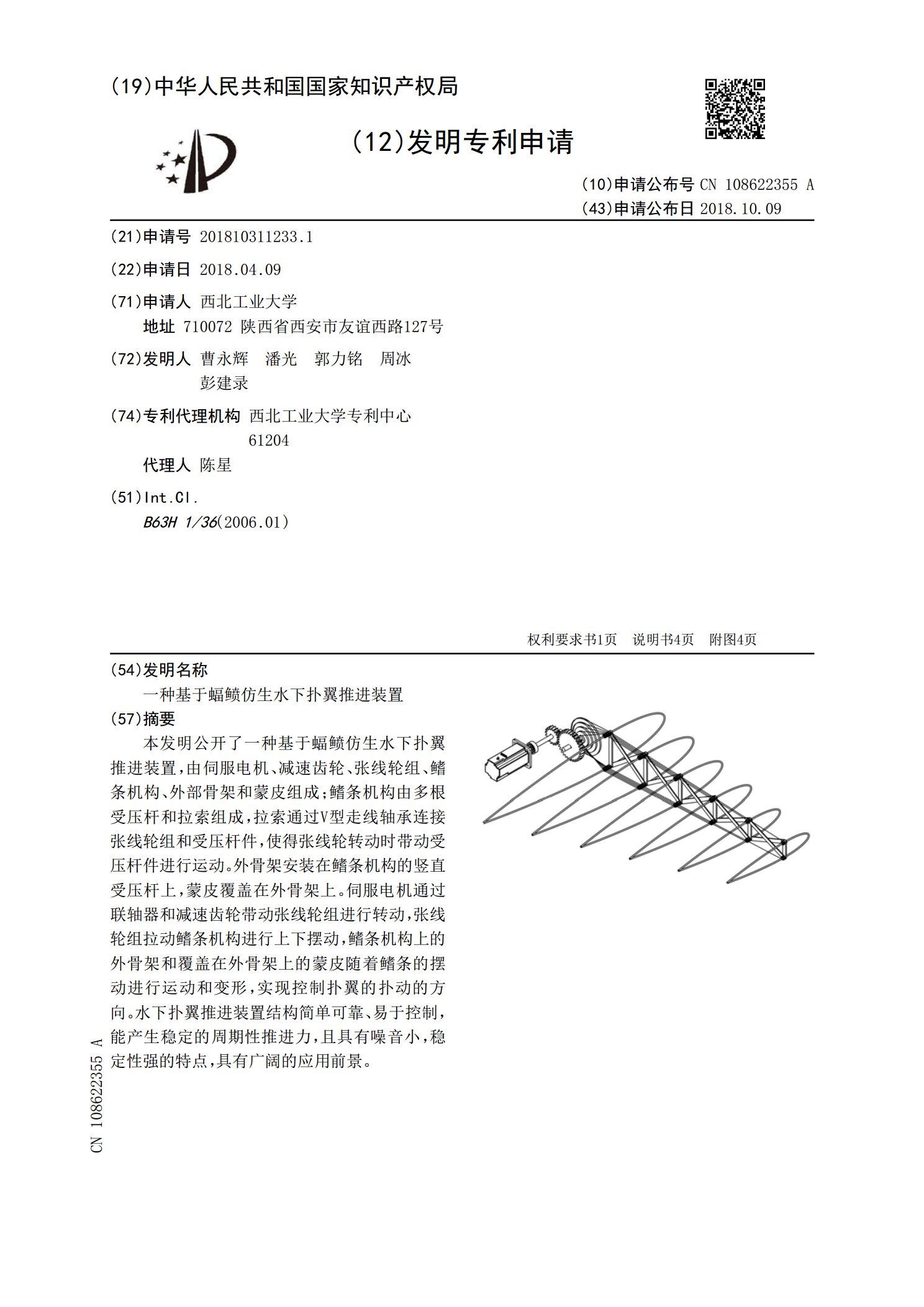
本发明公开了一种基于蝠鲼仿生水下扑翼推进装置,由伺服电机、减速齿轮、张线轮组、鳍条机构、外部骨架和蒙皮组成;鳍条机构由多根受压杆和拉索组成,拉索通过V型走线轴承连接张线轮组和受压杆件,使得张线轮转动时带动受压杆件进行运动。外骨架安装在鳍条机构的竖直受压杆上,蒙皮覆盖在外骨架上。伺服电机通过联轴器和减速齿轮带动张线轮组进行转动,张线轮组拉动鳍条机构进行上下摆动,鳍条机构上的外骨架和覆盖在外骨架上的蒙皮随着鳍条的摆动进行运动和变形,实现控制扑翼的扑动的方向。水下扑翼推进装置结构简单可靠、易于控制,能产生稳定的
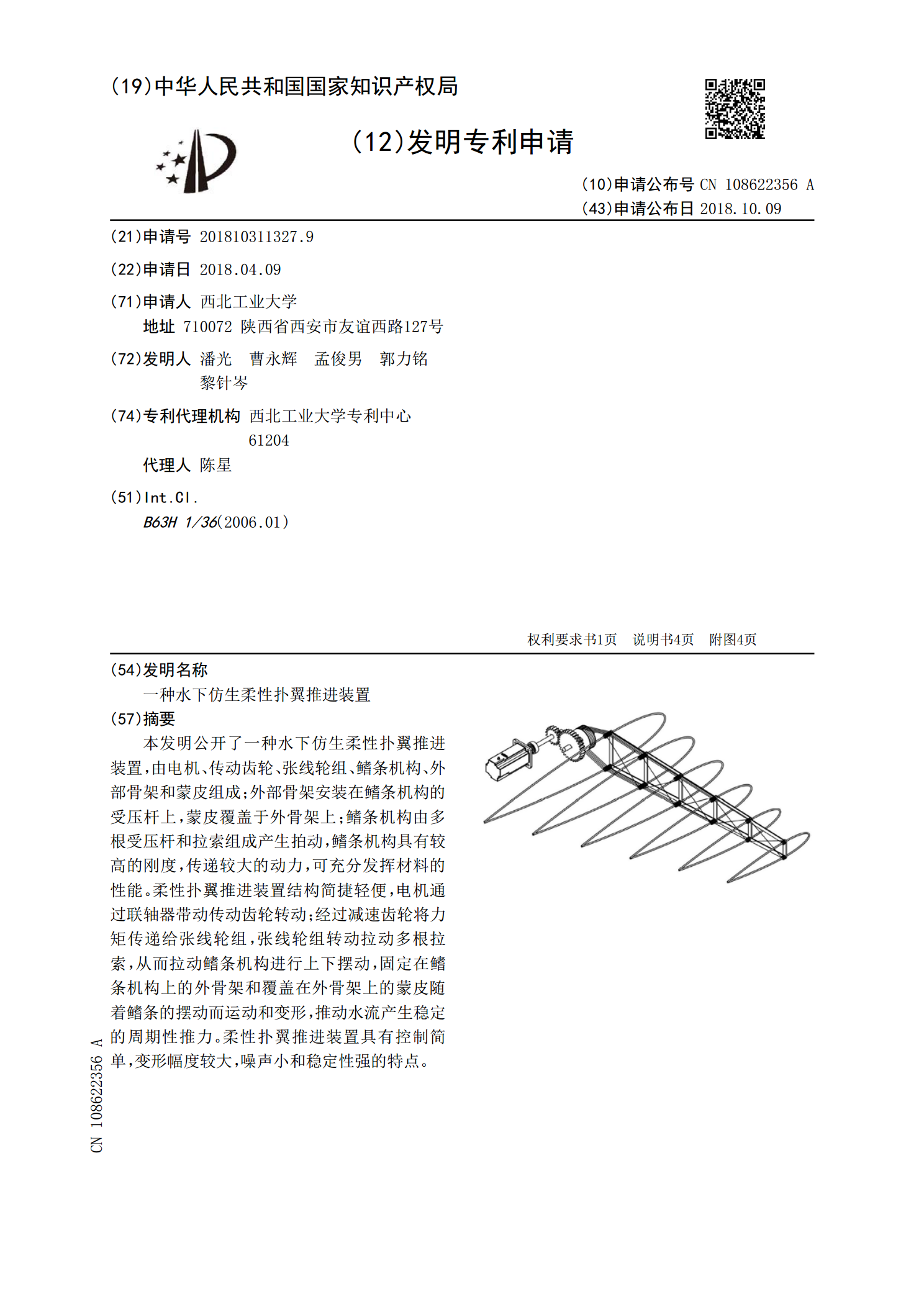
一种水下仿生柔性扑翼推进装置.pdf
本发明公开了一种水下仿生柔性扑翼推进装置,由电机、传动齿轮、张线轮组、鳍条机构、外部骨架和蒙皮组成;外部骨架安装在鳍条机构的受压杆上,蒙皮覆盖于外骨架上;鳍条机构由多根受压杆和拉索组成产生拍动,鳍条机构具有较高的刚度,传递较大的动力,可充分发挥材料的性能。柔性扑翼推进装置结构简捷轻便,电机通过联轴器带动传动齿轮转动;经过减速齿轮将力矩传递给张线轮组,张线轮组转动拉动多根拉索,从而拉动鳍条机构进行上下摆动,固定在鳍条机构上的外骨架和覆盖在外骨架上的蒙皮随着鳍条的摆动而运动和变形,推动水流产生稳定的周期性推力
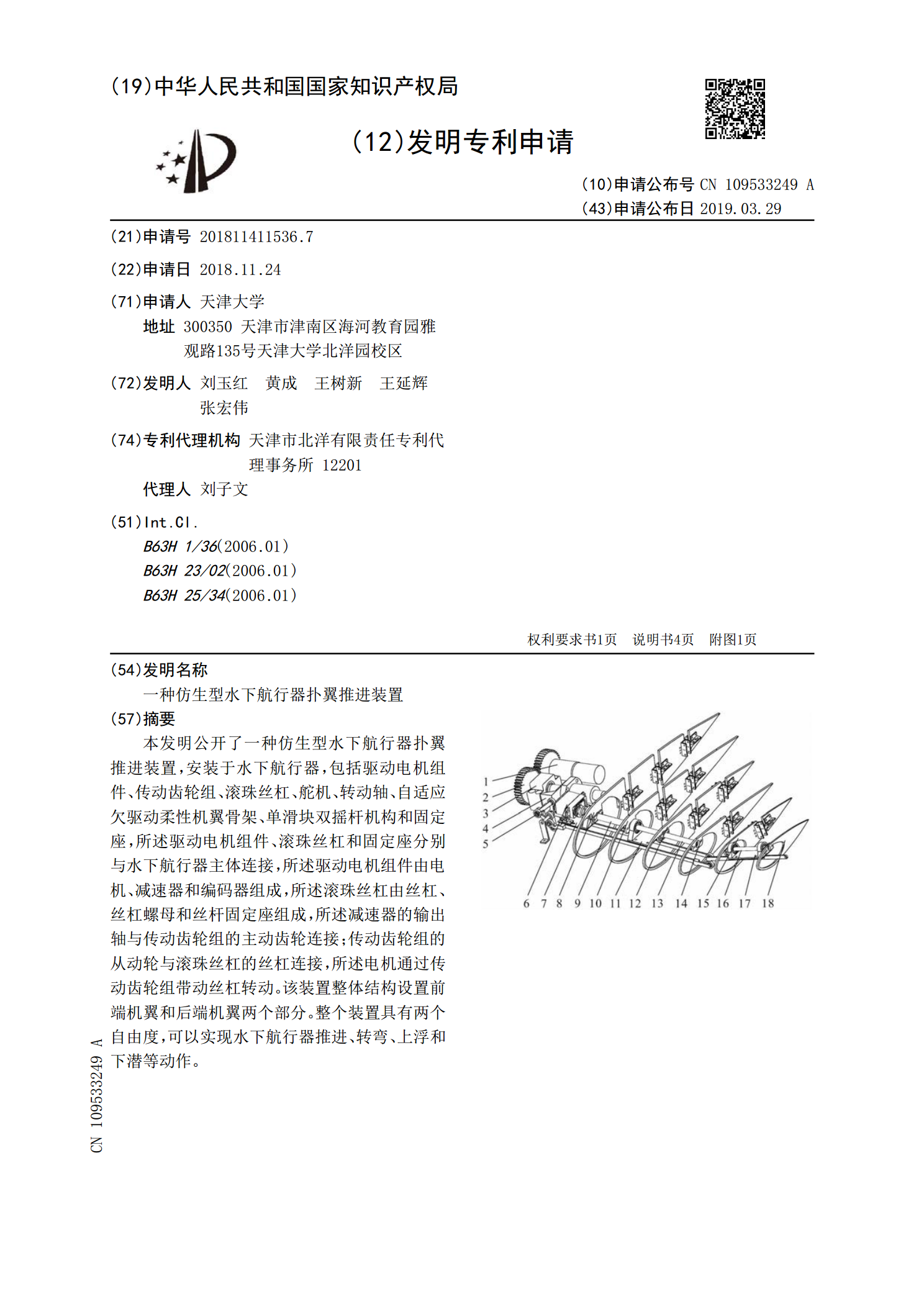
一种仿生型水下航行器扑翼推进装置.pdf
本发明公开了一种仿生型水下航行器扑翼推进装置,安装于水下航行器,包括驱动电机组件、传动齿轮组、滚珠丝杠、舵机、转动轴、自适应欠驱动柔性机翼骨架、单滑块双摇杆机构和固定座,所述驱动电机组件、滚珠丝杠和固定座分别与水下航行器主体连接,所述驱动电机组件由电机、减速器和编码器组成,所述滚珠丝杠由丝杠、丝杠螺母和丝杆固定座组成,所述减速器的输出轴与传动齿轮组的主动齿轮连接;传动齿轮组的从动轮与滚珠丝杠的丝杠连接,所述电机通过传动齿轮组带动丝杠转动。该装置整体结构设置前端机翼和后端机翼两个部分。整个装置具有两个自由度
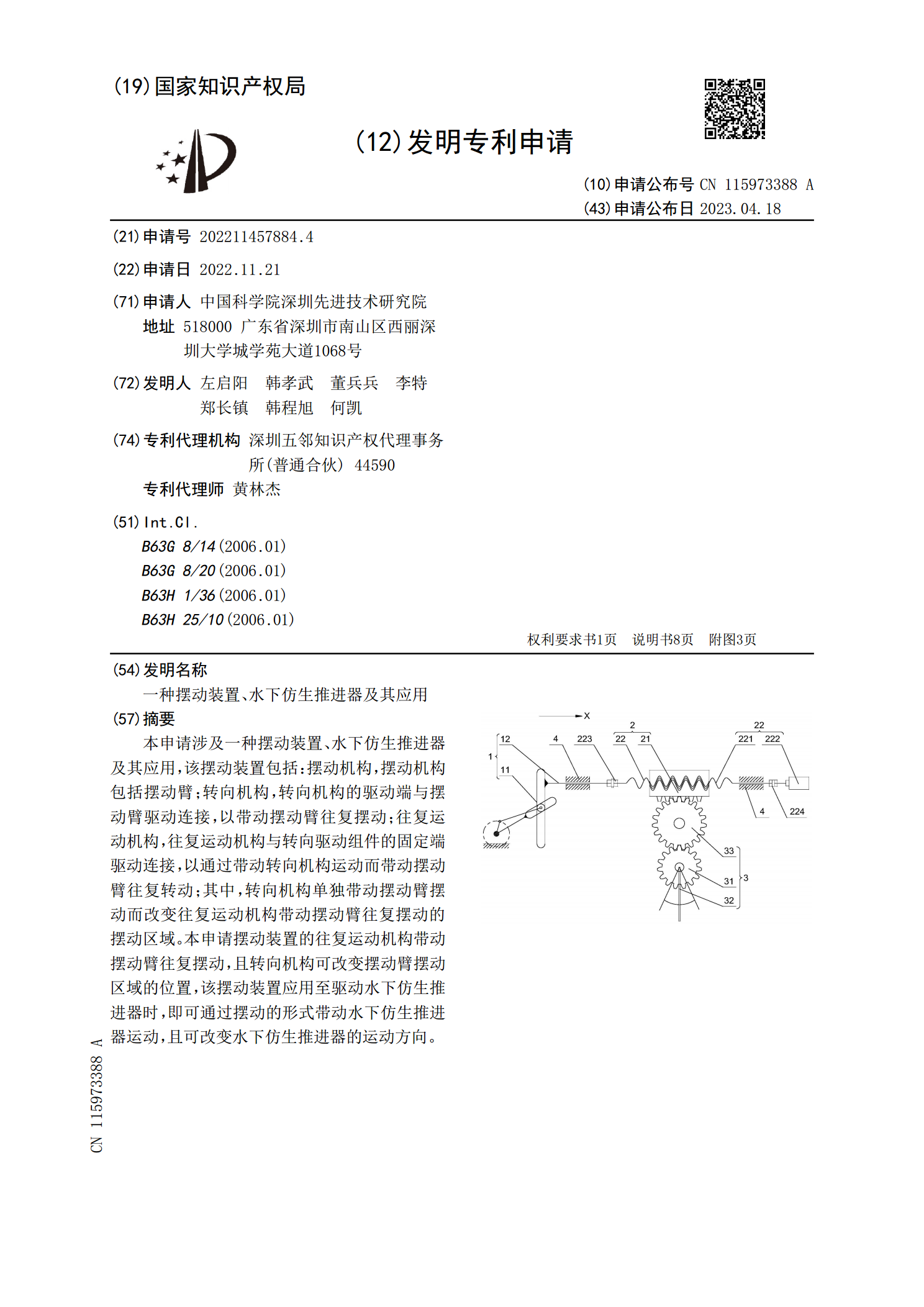
一种摆动装置、水下仿生推进器及其应用.pdf
本申请涉及一种摆动装置、水下仿生推进器及其应用,该摆动装置包括:摆动机构,摆动机构包括摆动臂;转向机构,转向机构的驱动端与摆动臂驱动连接,以带动摆动臂往复摆动;往复运动机构,往复运动机构与转向驱动组件的固定端驱动连接,以通过带动转向机构运动而带动摆动臂往复转动;其中,转向机构单独带动摆动臂摆动而改变往复运动机构带动摆动臂往复摆动的摆动区域。本申请摆动装置的往复运动机构带动摆动臂往复摆动,且转向机构可改变摆动臂摆动区域的位置,该摆动装置应用至驱动水下仿生推进器时,即可通过摆动的形式带动水下仿生推进器运动,且