
一种仿生型水下航行器扑翼推进装置.pdf

Wi****m7


1/7

2/7

3/7

4/7
5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种仿生型水下航行器扑翼推进装置.pdf
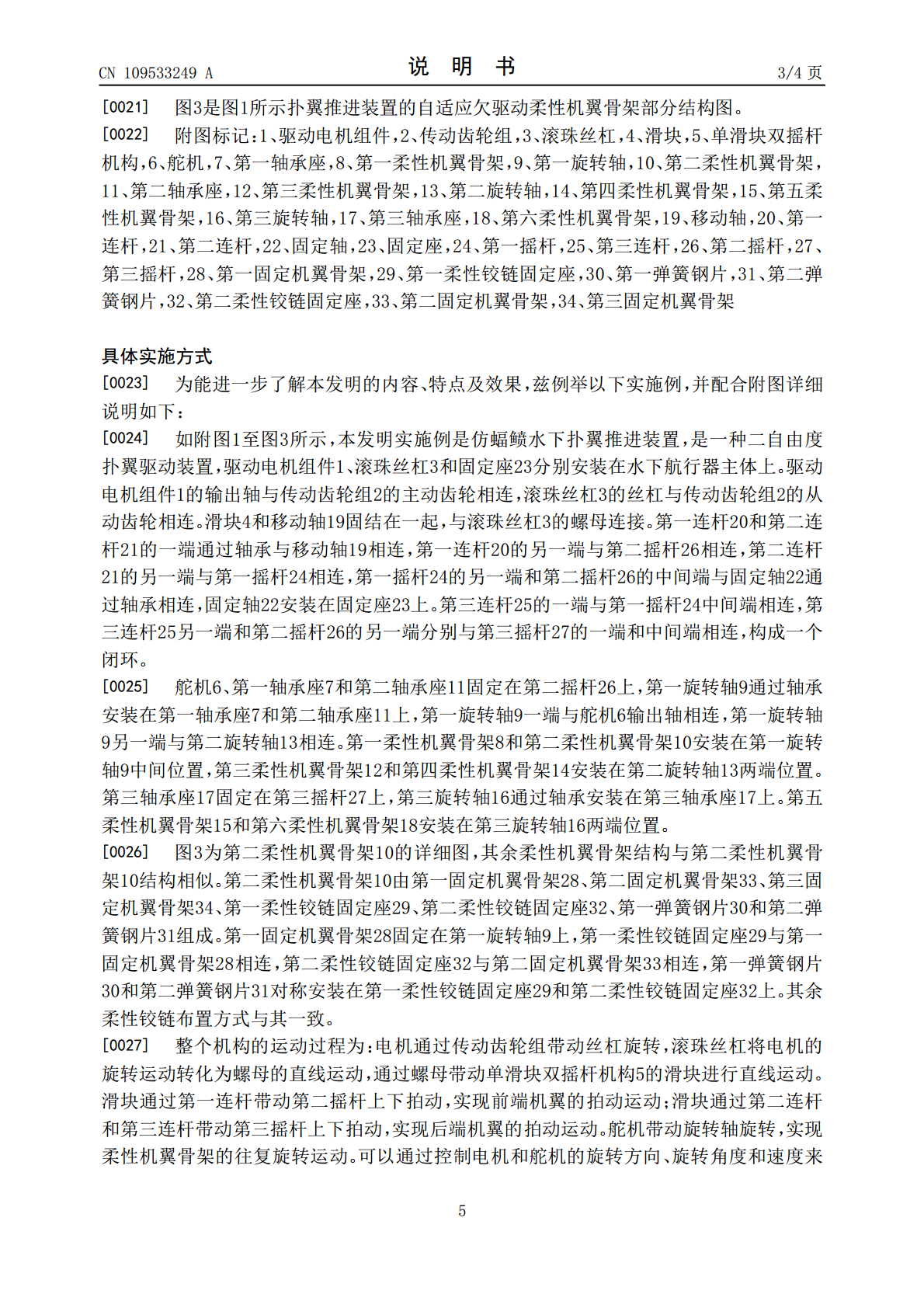
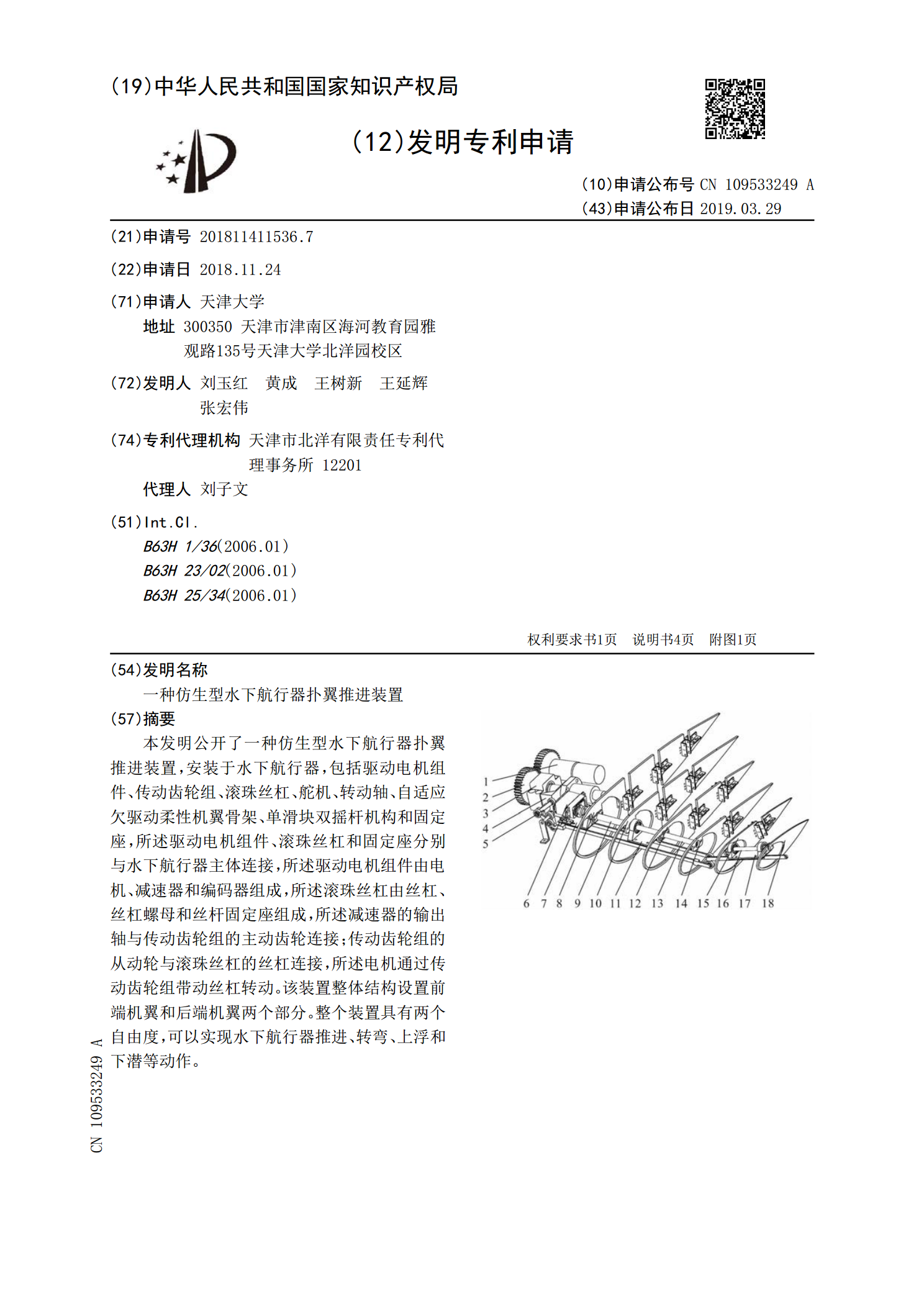
本发明公开了一种仿生型水下航行器扑翼推进装置,安装于水下航行器,包括驱动电机组件、传动齿轮组、滚珠丝杠、舵机、转动轴、自适应欠驱动柔性机翼骨架、单滑块双摇杆机构和固定座,所述驱动电机组件、滚珠丝杠和固定座分别与水下航行器主体连接,所述驱动电机组件由电机、减速器和编码器组成,所述滚珠丝杠由丝杠、丝杠螺母和丝杆固定座组成,所述减速器的输出轴与传动齿轮组的主动齿轮连接;传动齿轮组的从动轮与滚珠丝杠的丝杠连接,所述电机通过传动齿轮组带动丝杠转动。该装置整体结构设置前端机翼和后端机翼两个部分。整个装置具有两个自由度
一种水下仿生柔性扑翼推进装置.pdf
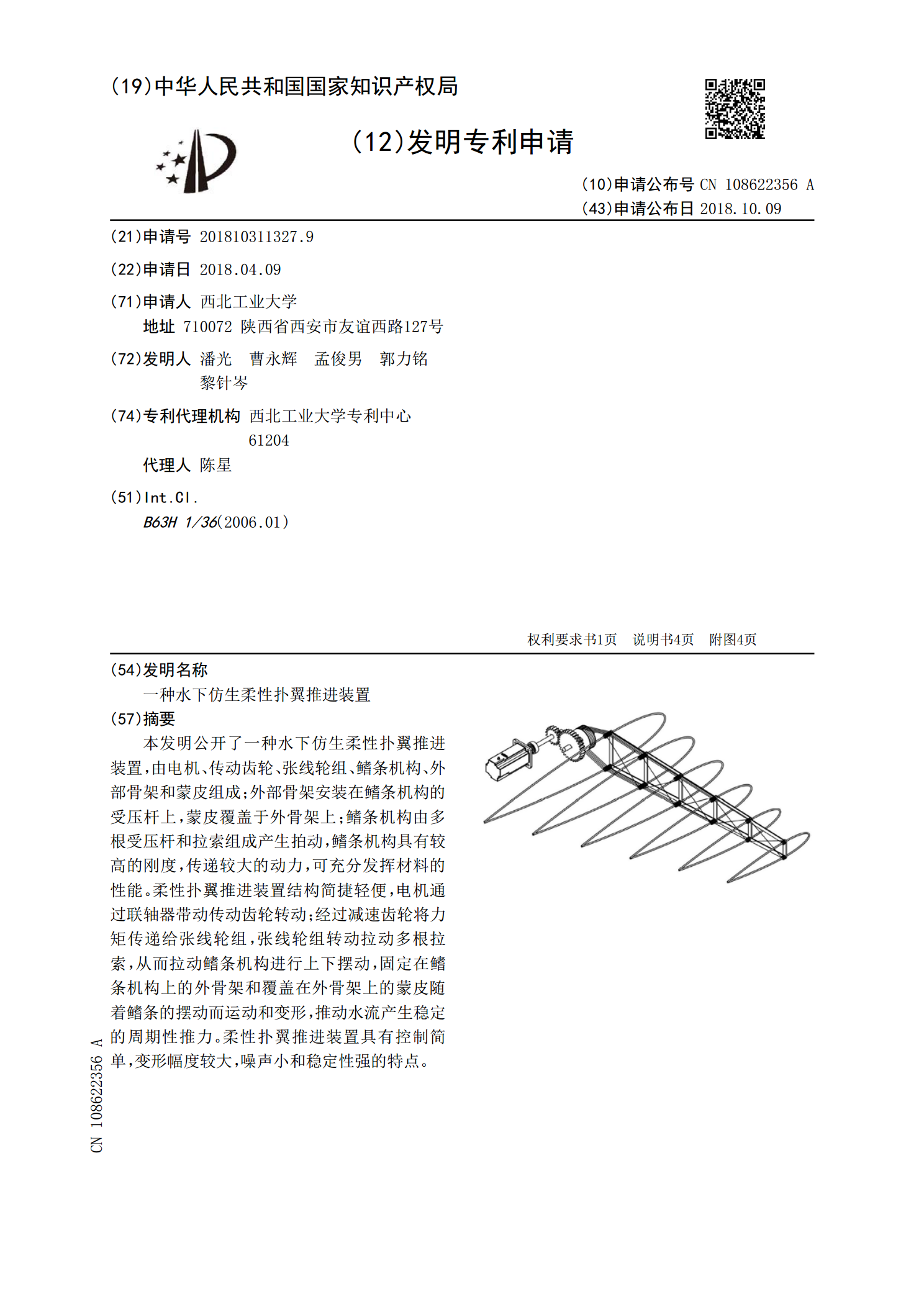
本发明公开了一种水下仿生柔性扑翼推进装置,由电机、传动齿轮、张线轮组、鳍条机构、外部骨架和蒙皮组成;外部骨架安装在鳍条机构的受压杆上,蒙皮覆盖于外骨架上;鳍条机构由多根受压杆和拉索组成产生拍动,鳍条机构具有较高的刚度,传递较大的动力,可充分发挥材料的性能。柔性扑翼推进装置结构简捷轻便,电机通过联轴器带动传动齿轮转动;经过减速齿轮将力矩传递给张线轮组,张线轮组转动拉动多根拉索,从而拉动鳍条机构进行上下摆动,固定在鳍条机构上的外骨架和覆盖在外骨架上的蒙皮随着鳍条的摆动而运动和变形,推动水流产生稳定的周期性推力
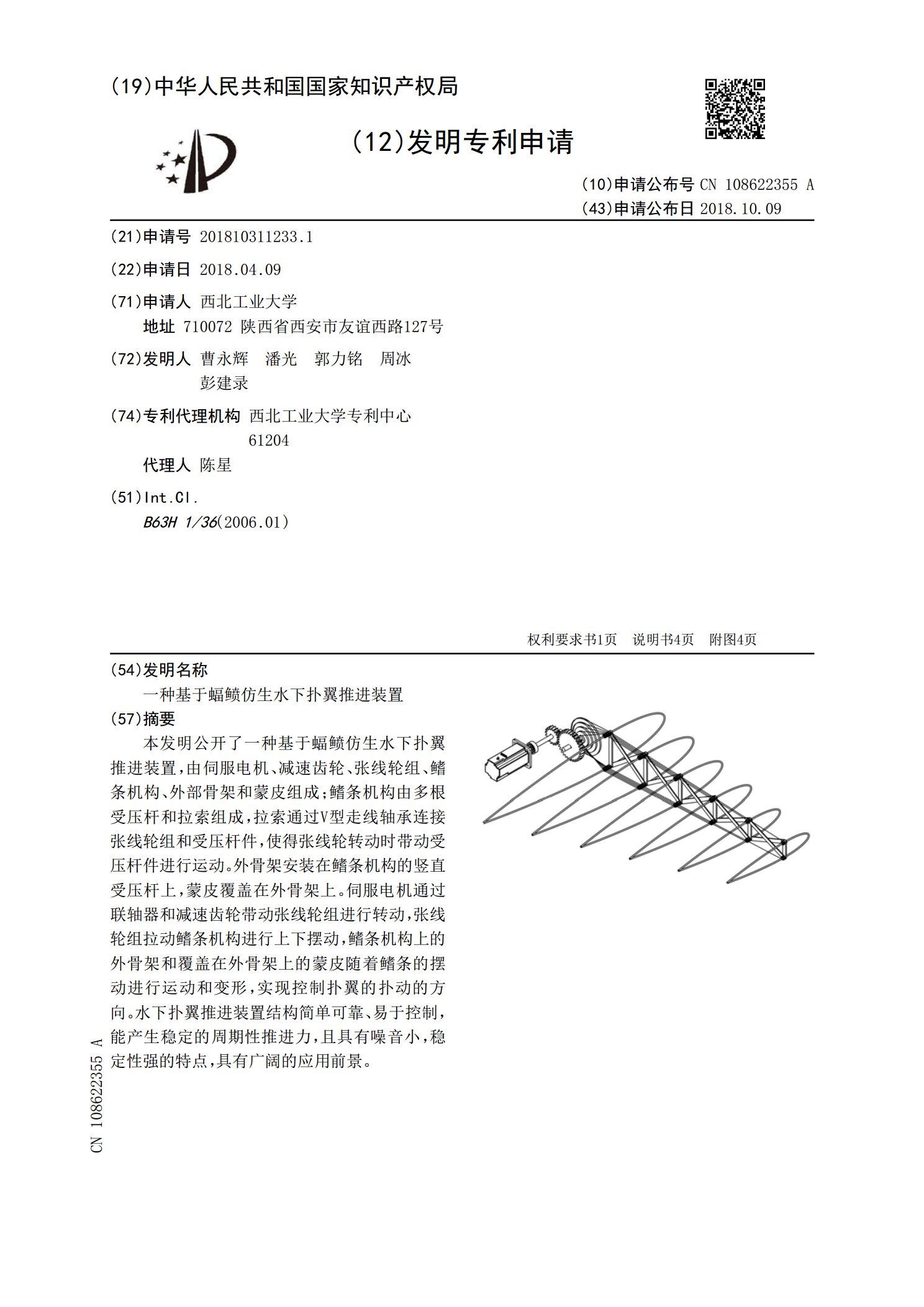
一种基于蝠鲼仿生水下扑翼推进装置.pdf
本发明公开了一种基于蝠鲼仿生水下扑翼推进装置,由伺服电机、减速齿轮、张线轮组、鳍条机构、外部骨架和蒙皮组成;鳍条机构由多根受压杆和拉索组成,拉索通过V型走线轴承连接张线轮组和受压杆件,使得张线轮转动时带动受压杆件进行运动。外骨架安装在鳍条机构的竖直受压杆上,蒙皮覆盖在外骨架上。伺服电机通过联轴器和减速齿轮带动张线轮组进行转动,张线轮组拉动鳍条机构进行上下摆动,鳍条机构上的外骨架和覆盖在外骨架上的蒙皮随着鳍条的摆动进行运动和变形,实现控制扑翼的扑动的方向。水下扑翼推进装置结构简单可靠、易于控制,能产生稳定的
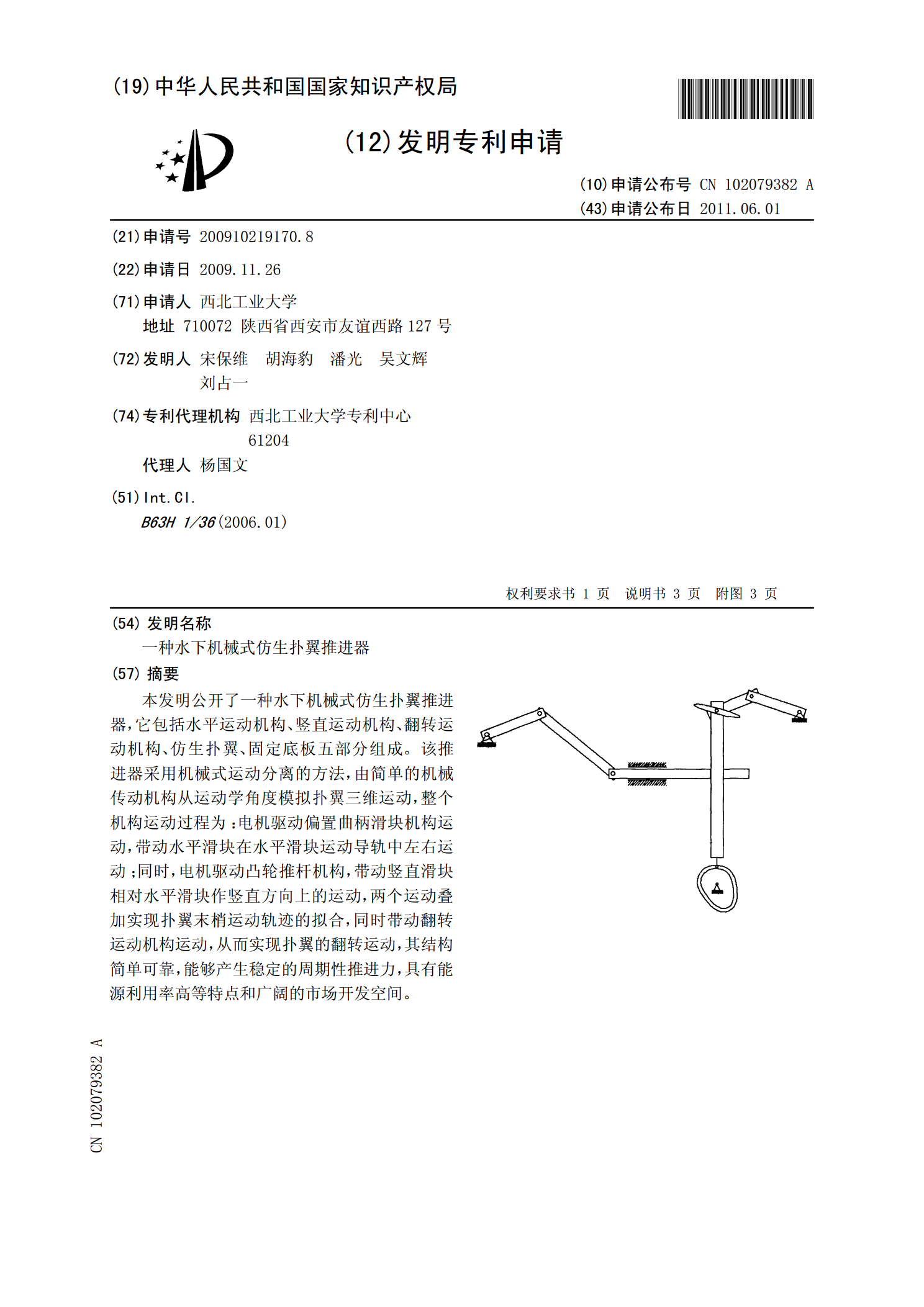
一种水下机械式仿生扑翼推进器.pdf
本发明公开了一种水下机械式仿生扑翼推进器,它包括水平运动机构、竖直运动机构、翻转运动机构、仿生扑翼、固定底板五部分组成。该推进器采用机械式运动分离的方法,由简单的机械传动机构从运动学角度模拟扑翼三维运动,整个机构运动过程为:电机驱动偏置曲柄滑块机构运动,带动水平滑块在水平滑块运动导轨中左右运动;同时,电机驱动凸轮推杆机构,带动竖直滑块相对水平滑块作竖直方向上的运动,两个运动叠加实现扑翼末梢运动轨迹的拟合,同时带动翻转运动机构运动,从而实现扑翼的翻转运动,其结构简单可靠,能够产生稳定的周期性推进力,具有能源
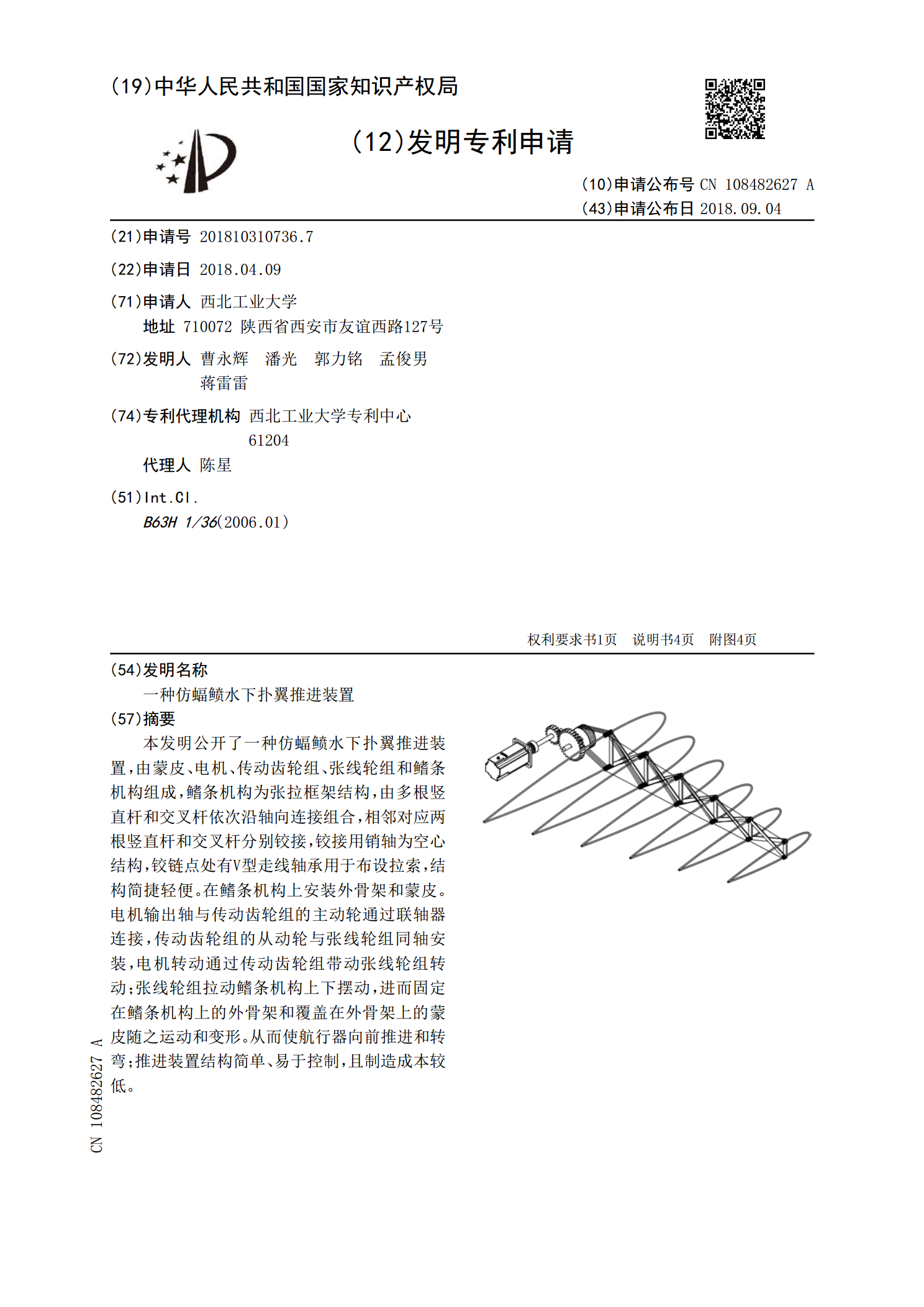
一种仿蝠鲼水下扑翼推进装置.pdf
本发明公开了一种仿蝠鲼水下扑翼推进装置,由蒙皮、电机、传动齿轮组、张线轮组和鳍条机构组成,鳍条机构为张拉框架结构,由多根竖直杆和交叉杆依次沿轴向连接组合,相邻对应两根竖直杆和交叉杆分别铰接,铰接用销轴为空心结构,铰链点处有V型走线轴承用于布设拉索,结构简捷轻便。在鳍条机构上安装外骨架和蒙皮。电机输出轴与传动齿轮组的主动轮通过联轴器连接,传动齿轮组的从动轮与张线轮组同轴安装,电机转动通过传动齿轮组带动张线轮组转动;张线轮组拉动鳍条机构上下摆动,进而固定在鳍条机构上的外骨架和覆盖在外骨架上的蒙皮随之运动和变形