
基于北斗卫星导航的边坡变形放大装置.pdf

依波****bc

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于北斗卫星导航的边坡变形放大装置.pdf
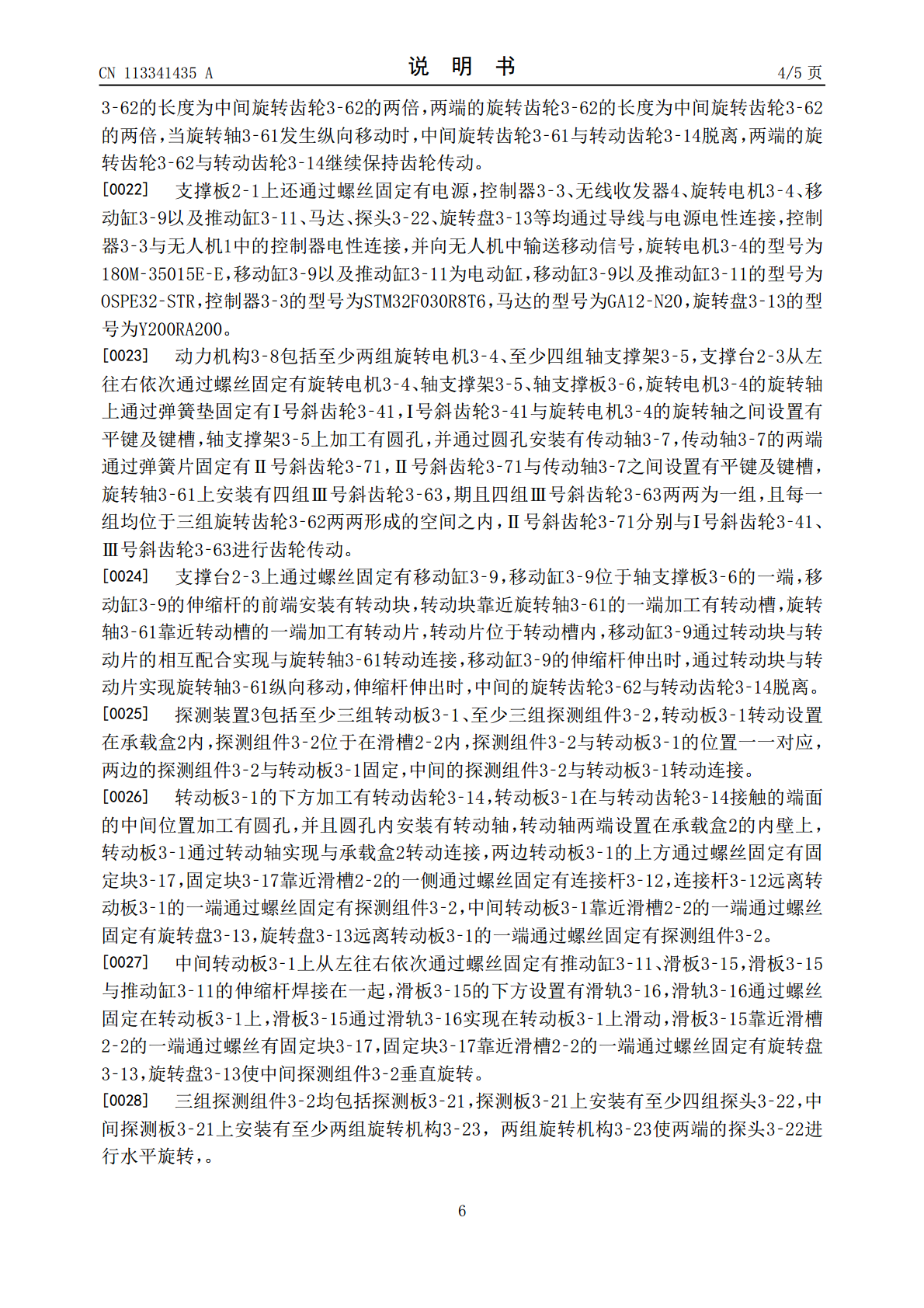
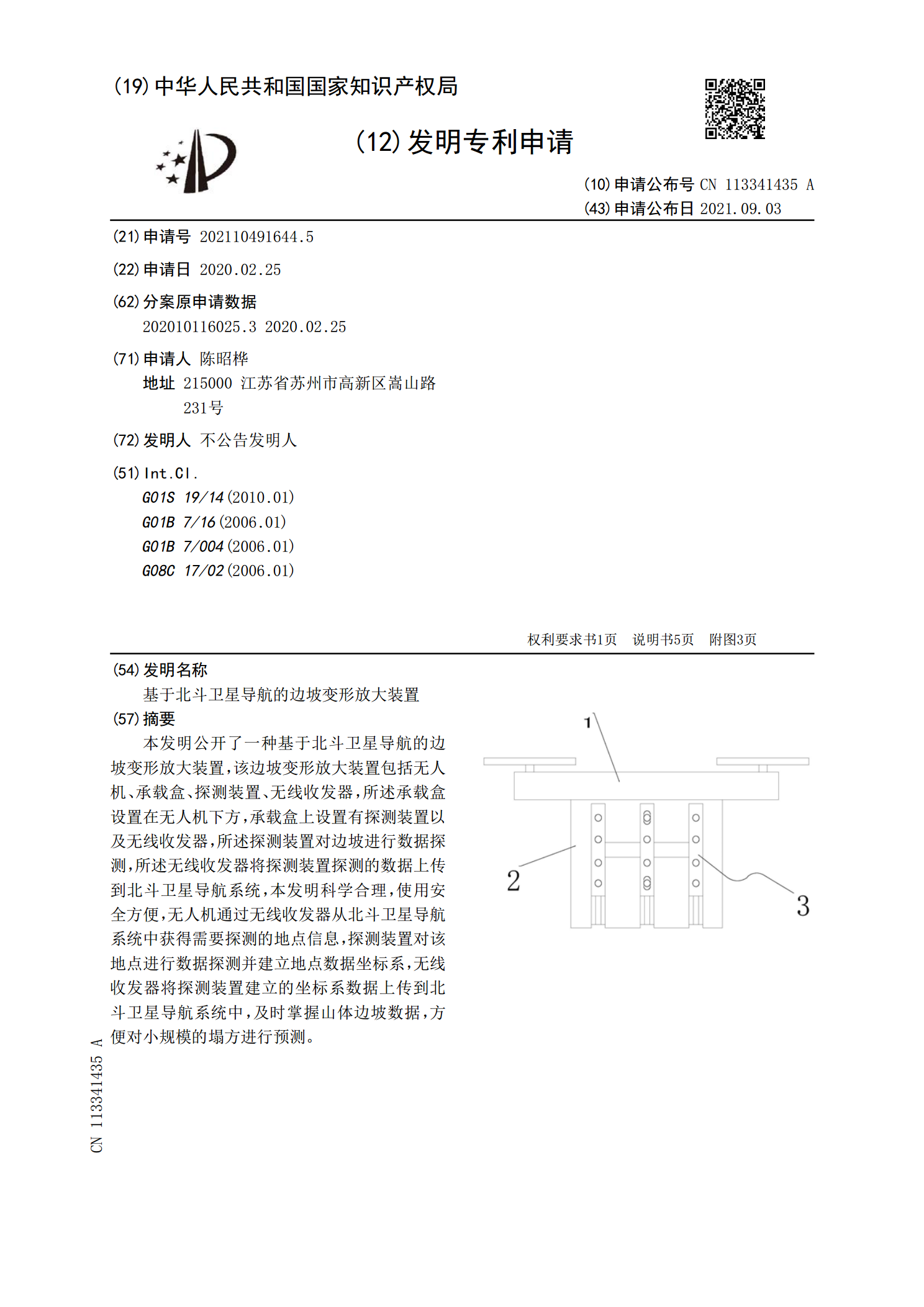
本发明公开了一种基于北斗卫星导航的边坡变形放大装置,该边坡变形放大装置包括无人机、承载盒、探测装置、无线收发器,所述承载盒设置在无人机下方,承载盒上设置有探测装置以及无线收发器,所述探测装置对边坡进行数据探测,所述无线收发器将探测装置探测的数据上传到北斗卫星导航系统,本发明科学合理,使用安全方便,无人机通过无线收发器从北斗卫星导航系统中获得需要探测的地点信息,探测装置对该地点进行数据探测并建立地点数据坐标系,无线收发器将探测装置建立的坐标系数据上传到北斗卫星导航系统中,及时掌握山体边坡数据,方便对小规模的
一种基于北斗卫星导航的边坡变形放大装置.pdf
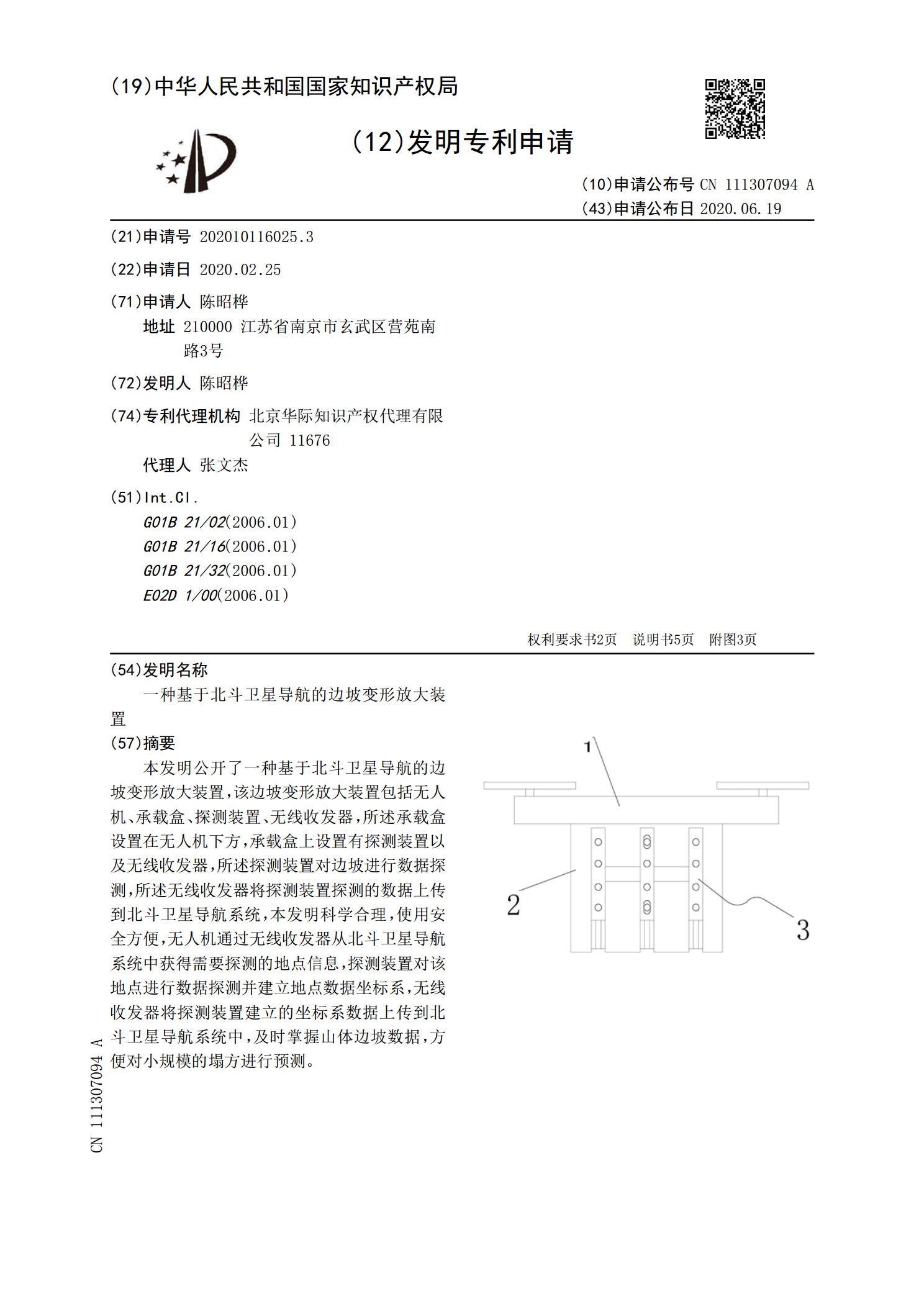
本发明公开了一种基于北斗卫星导航的边坡变形放大装置,该边坡变形放大装置包括无人机、承载盒、探测装置、无线收发器,所述承载盒设置在无人机下方,承载盒上设置有探测装置以及无线收发器,所述探测装置对边坡进行数据探测,所述无线收发器将探测装置探测的数据上传到北斗卫星导航系统,本发明科学合理,使用安全方便,无人机通过无线收发器从北斗卫星导航系统中获得需要探测的地点信息,探测装置对该地点进行数据探测并建立地点数据坐标系,无线收发器将探测装置建立的坐标系数据上传到北斗卫星导航系统中,及时掌握山体边坡数据,方便对小规模的
一种基于北斗卫星导航的边坡变形放大装置.pdf
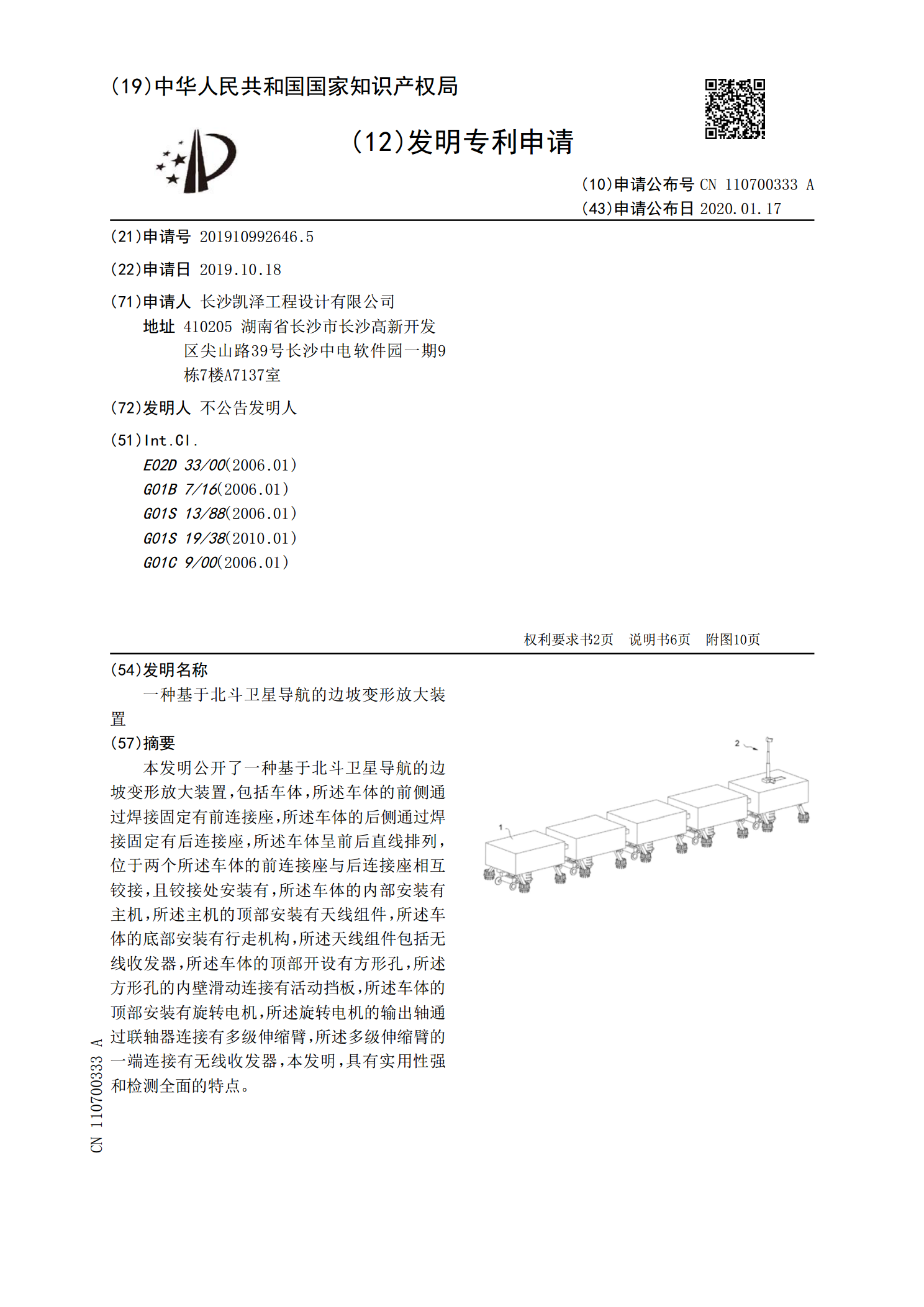
本发明公开了一种基于北斗卫星导航的边坡变形放大装置,包括车体,所述车体的前侧通过焊接固定有前连接座,所述车体的后侧通过焊接固定有后连接座,所述车体呈前后直线排列,位于两个所述车体的前连接座与后连接座相互铰接,且铰接处安装有,所述车体的内部安装有主机,所述主机的顶部安装有天线组件,所述车体的底部安装有行走机构,所述天线组件包括无线收发器,所述车体的顶部开设有方形孔,所述方形孔的内壁滑动连接有活动挡板,所述车体的顶部安装有旋转电机,所述旋转电机的输出轴通过联轴器连接有多级伸缩臂,所述多级伸缩臂的一端连接有无线

一种基于北斗卫星导航系统的边坡形变放大机构.pdf
本发明提供了一种基于北斗卫星导航系统的边坡形变放大机构。包括放大机构部分、拉线连接部分、监测桩主体部分和位移探测部分;监测桩主体部分包括立柱和支撑底座,立柱底端固定在支撑底座上;放大机构部分包括固定底座和转动天线支架;固定底座还包括底座、压紧弹簧、限位板、拉紧弹簧;转动天线支架还包括支杆、吊环螺栓、定位天线、滑动螺母、定位螺栓、拉线卡环;位移探测部分包括探测体和调节环;拉线连接部分包括拉线头部和拉线尾部;拉线头部包括拉线头、拉线、空心螺柱、拉线支座和拉线套;拉线尾部包括刚性管、开口盖、实心螺柱。本发明具有

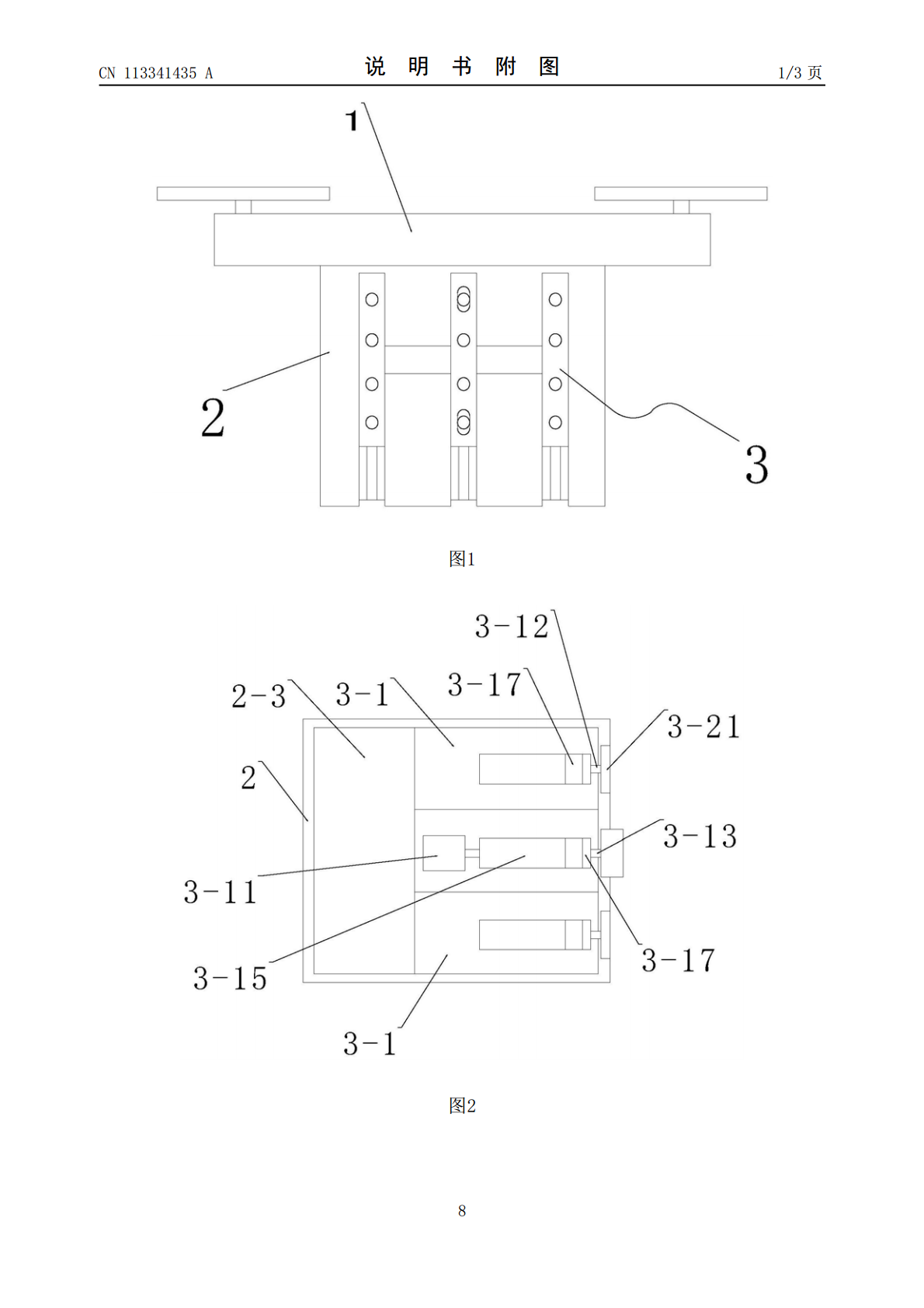
基于北斗卫星的边坡变形监测系统应用研究.docx
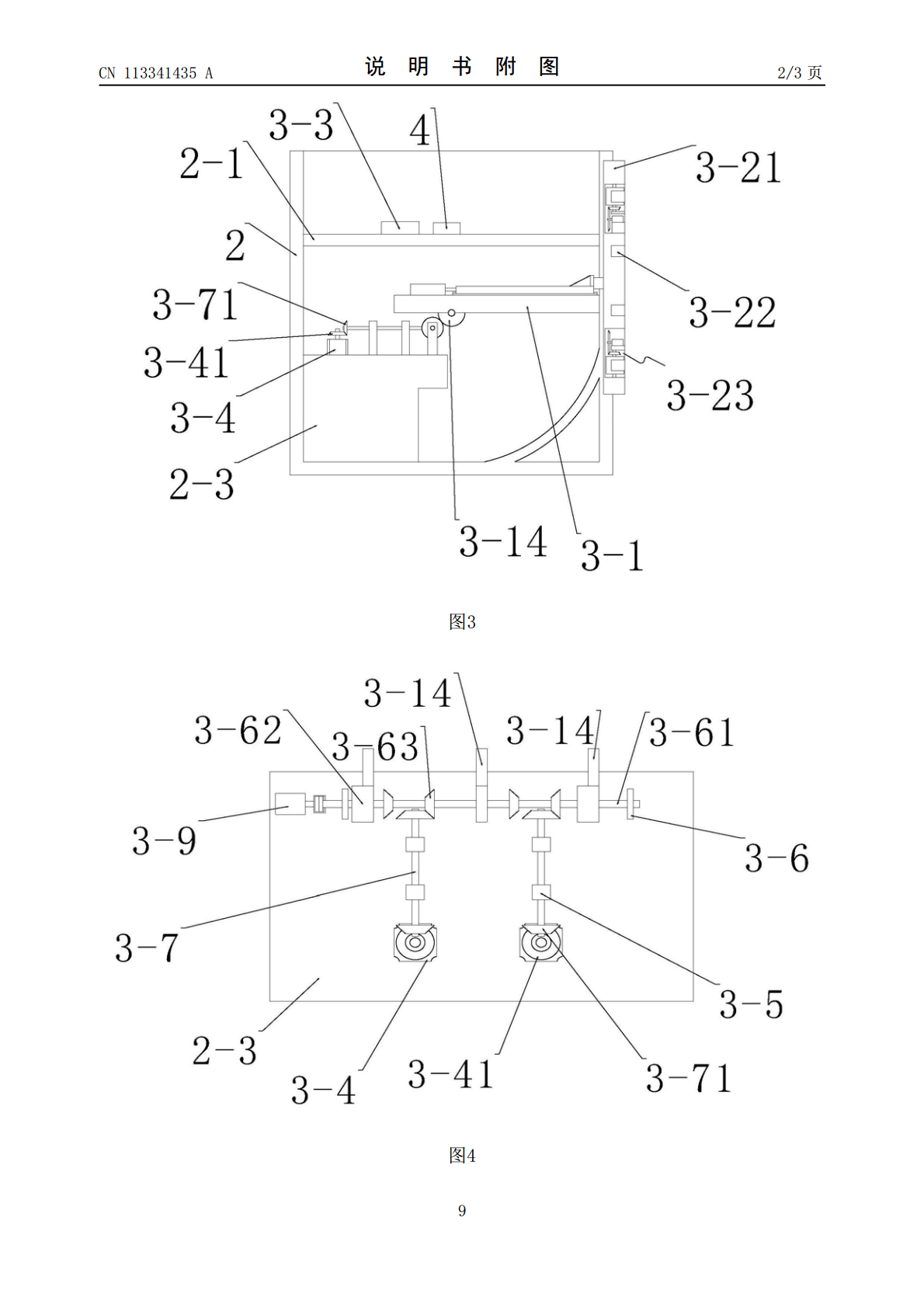
基于北斗卫星的边坡变形监测系统应用研究基于北斗卫星的边坡变形监测系统应用研究摘要:随着经济的发展和城市化进程的加快,边坡工程在现代社会中越来越重要。然而,边坡变形监测的精度和实时性一直是一个挑战。本研究基于北斗卫星系统,设计了一种边坡变形监测系统,并对其进行了应用研究。通过对实际边坡进行监测和分析,本研究验证了北斗卫星系统在边坡变形监测中的可行性和有效性。1.引言边坡变形监测是边坡工程中至关重要的一环。准确地监测边坡的变形情况可以帮助评估边坡的稳定性,及时采取相应的措施避免发生灾害。然而,传统的边坡变形监