
数字钥匙定位系统和定位方法.pdf

书生****ma


1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
数字钥匙定位系统和定位方法.pdf
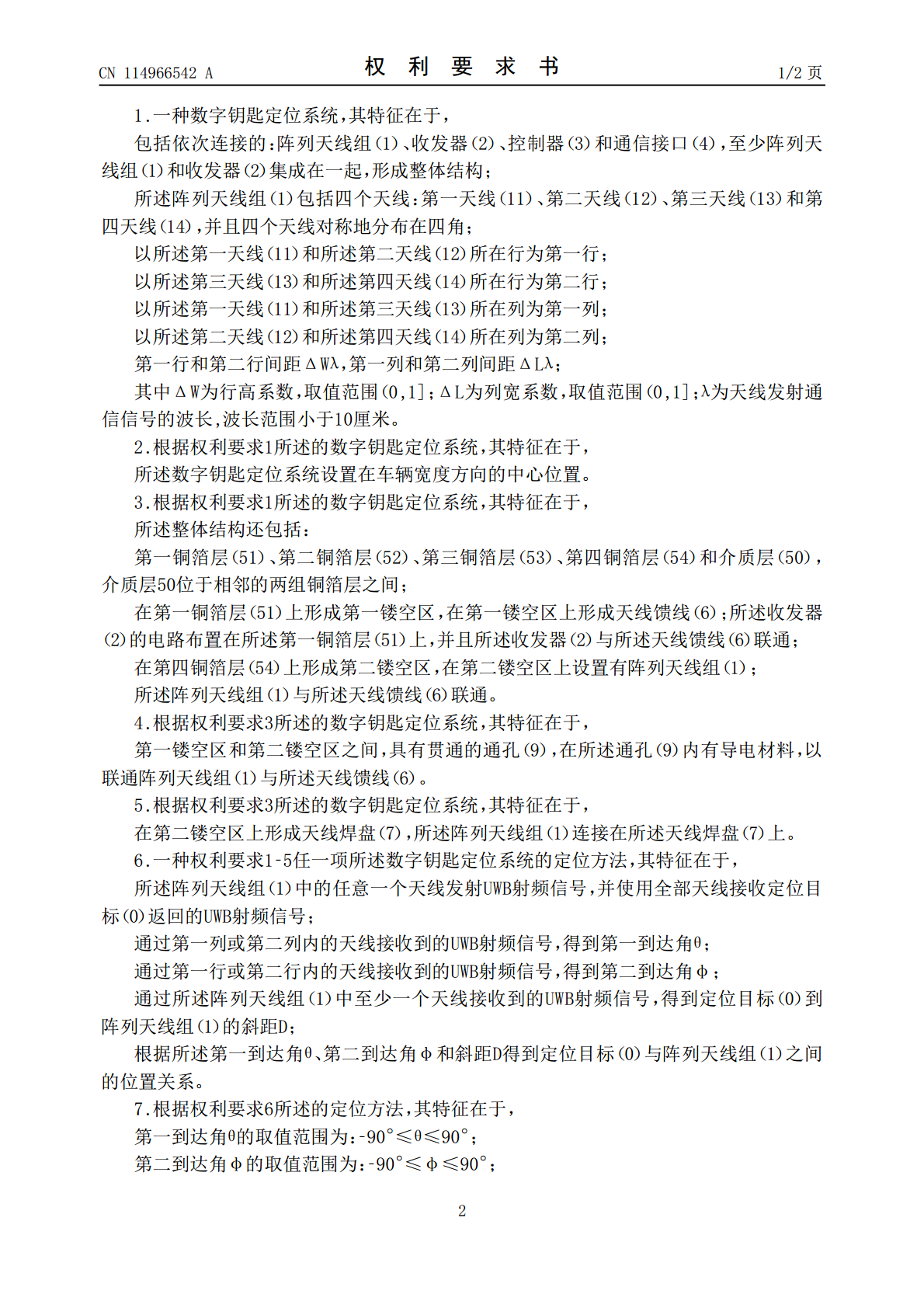
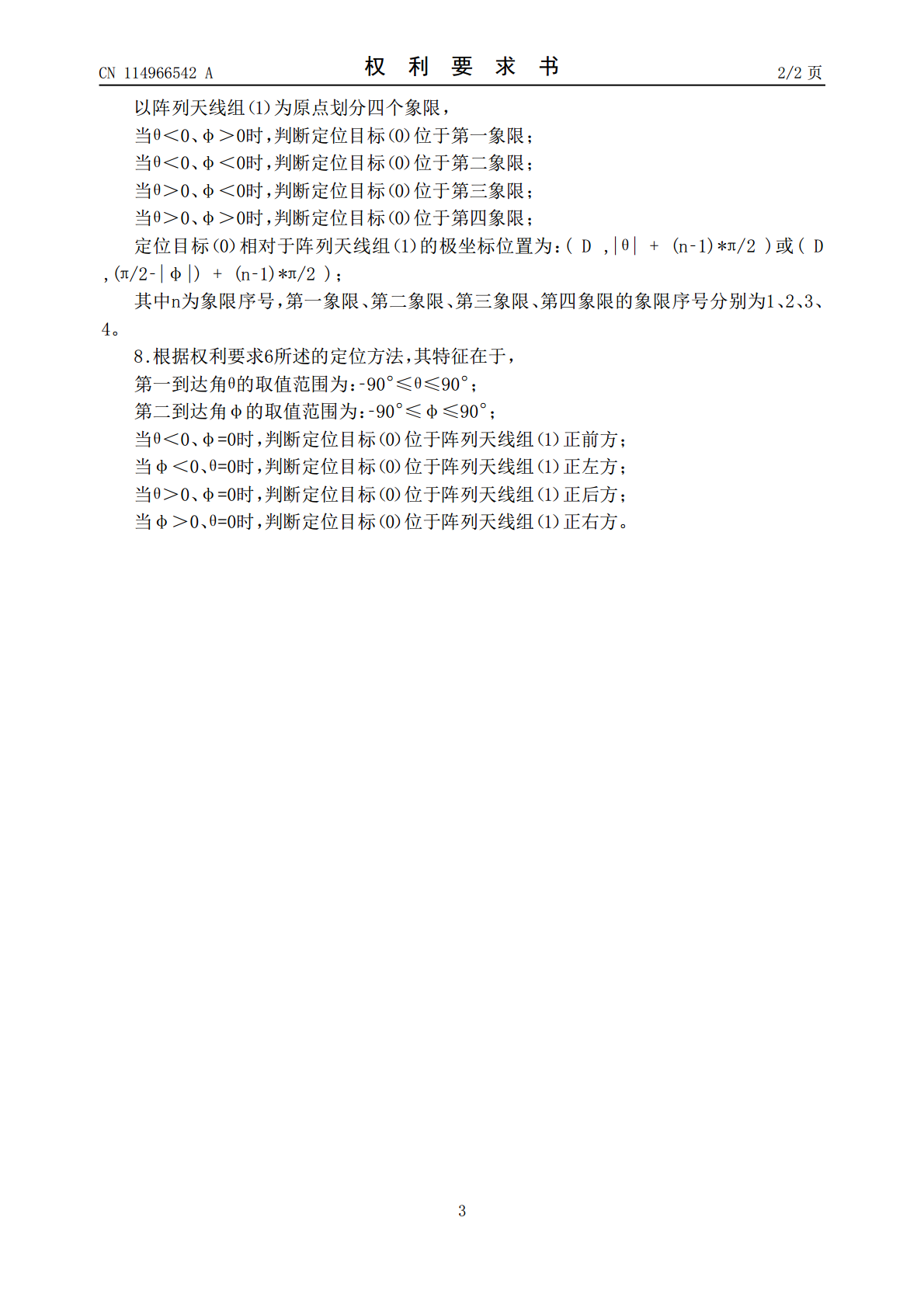
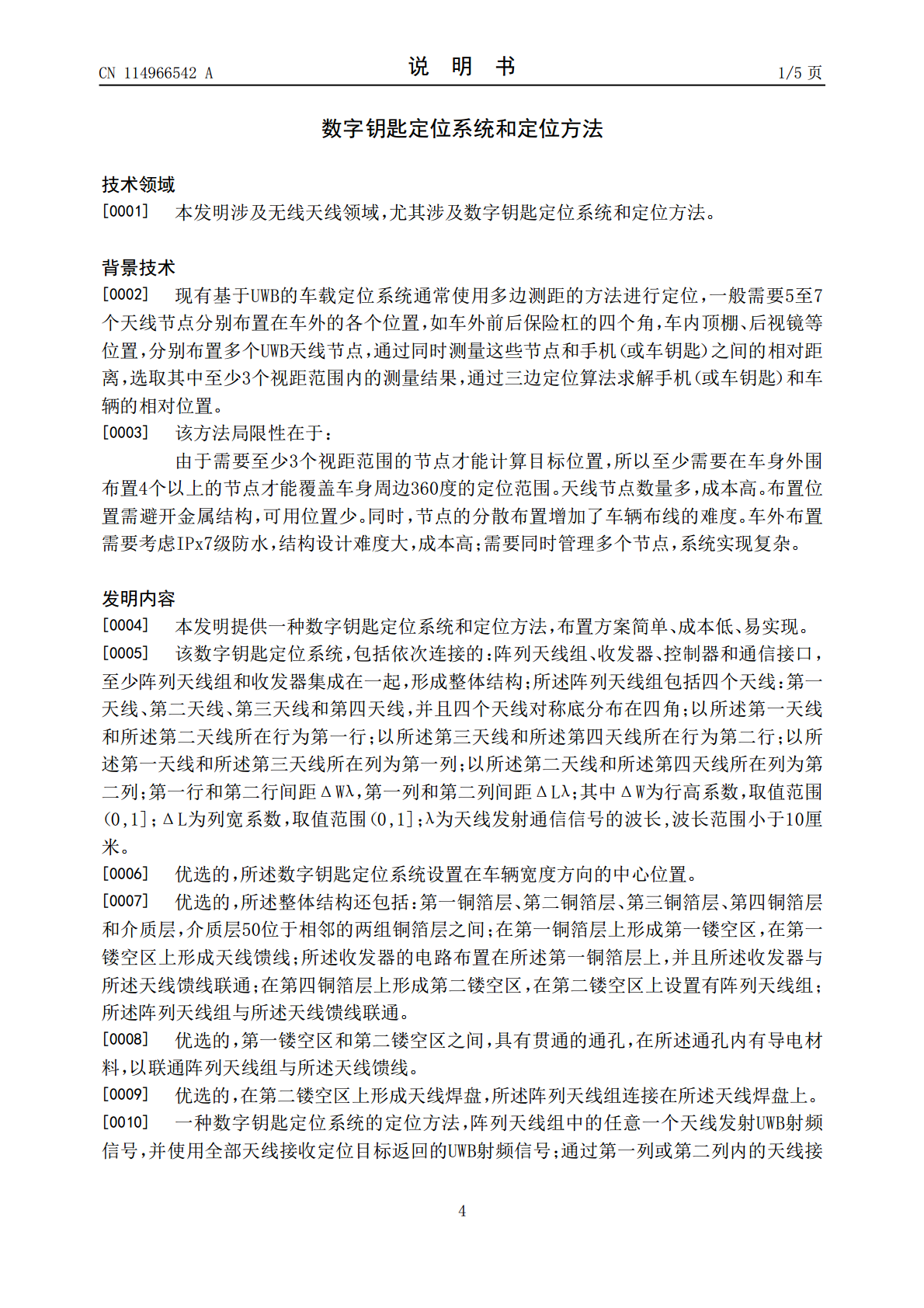
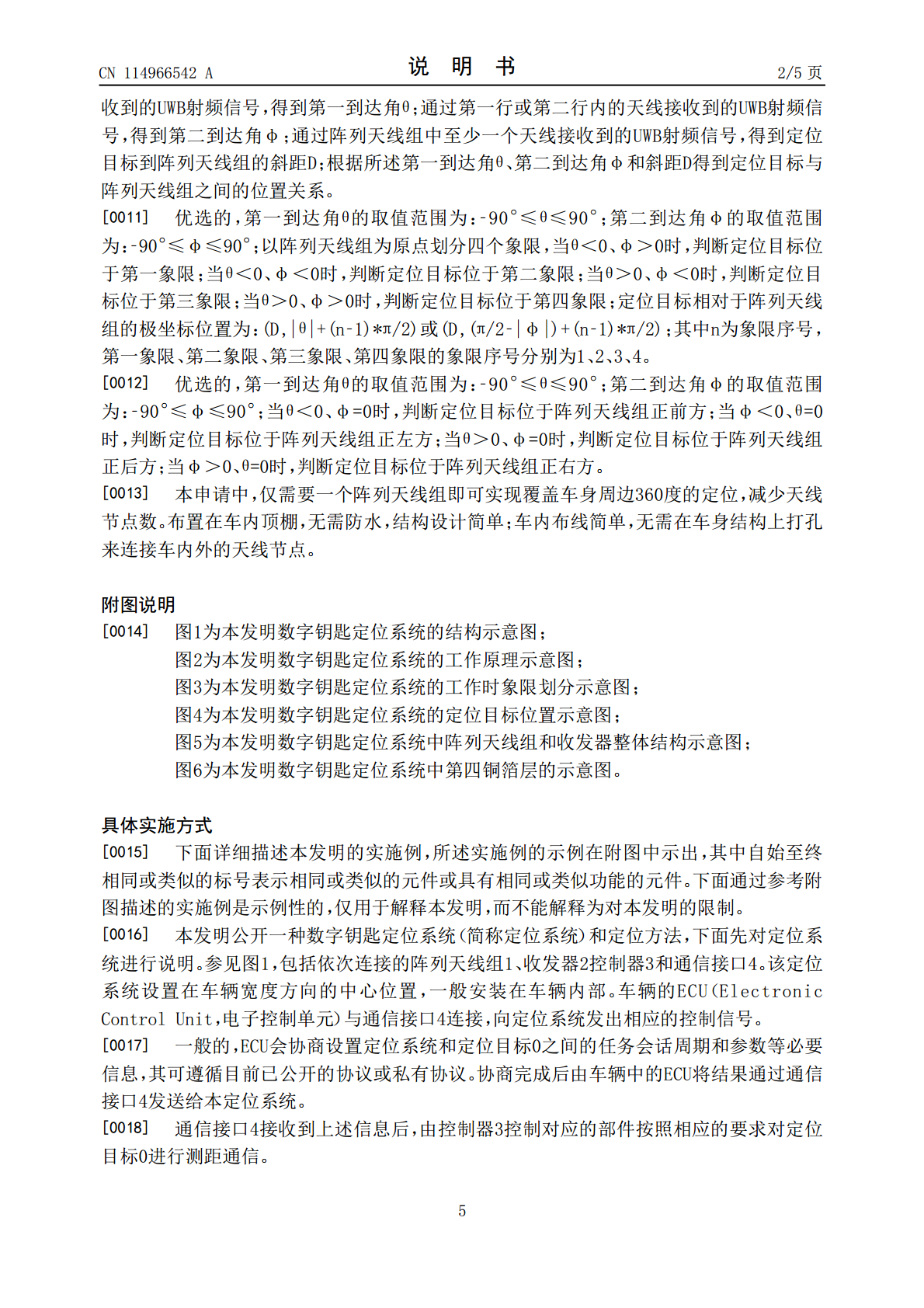
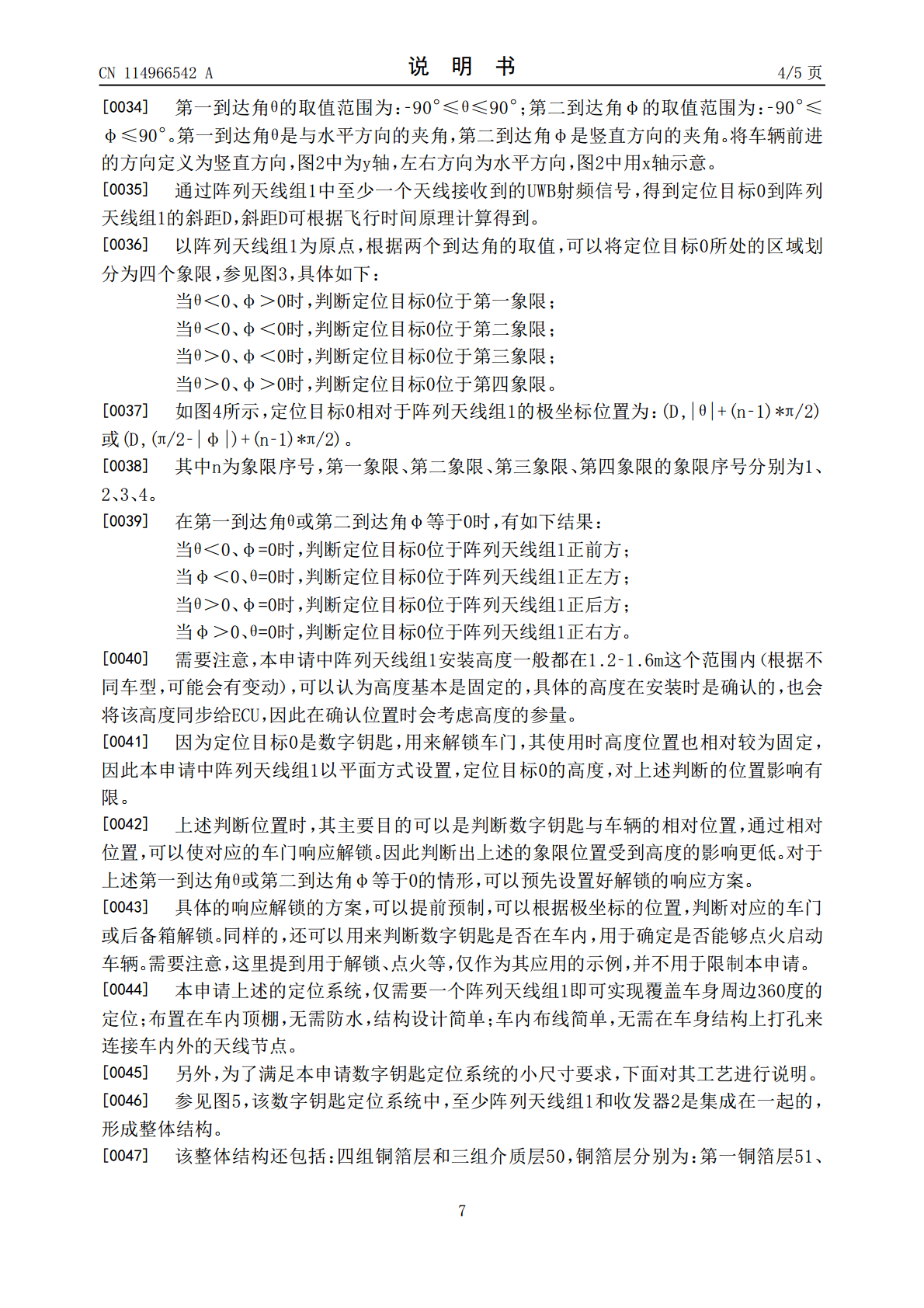
本发明公开了数字钥匙定位系统和定位方法,系统包括依次连接的:阵列天线组、收发器控制器和通信接口;阵列天线组包括四个天线:第一天线、第二天线、第三天线和第四天线,定位方法是阵列天线组中的任意一个天线发射射频信号,并使用全部天线接收定位目标返回的射频信号;通过天线接收到的射频信号,得到第一到达角、第二到达角、定位目标到阵列天线组的斜;根据第一到达角、第二到达角和斜距得到定位目标与阵列天线组之间的位置关系。本申请中,仅需要一个阵列天线组即可实现覆盖车身周边的定位,减少天线节点数。布置在车内顶棚,无需防水,结构设
数字钥匙定位天线模块.pdf
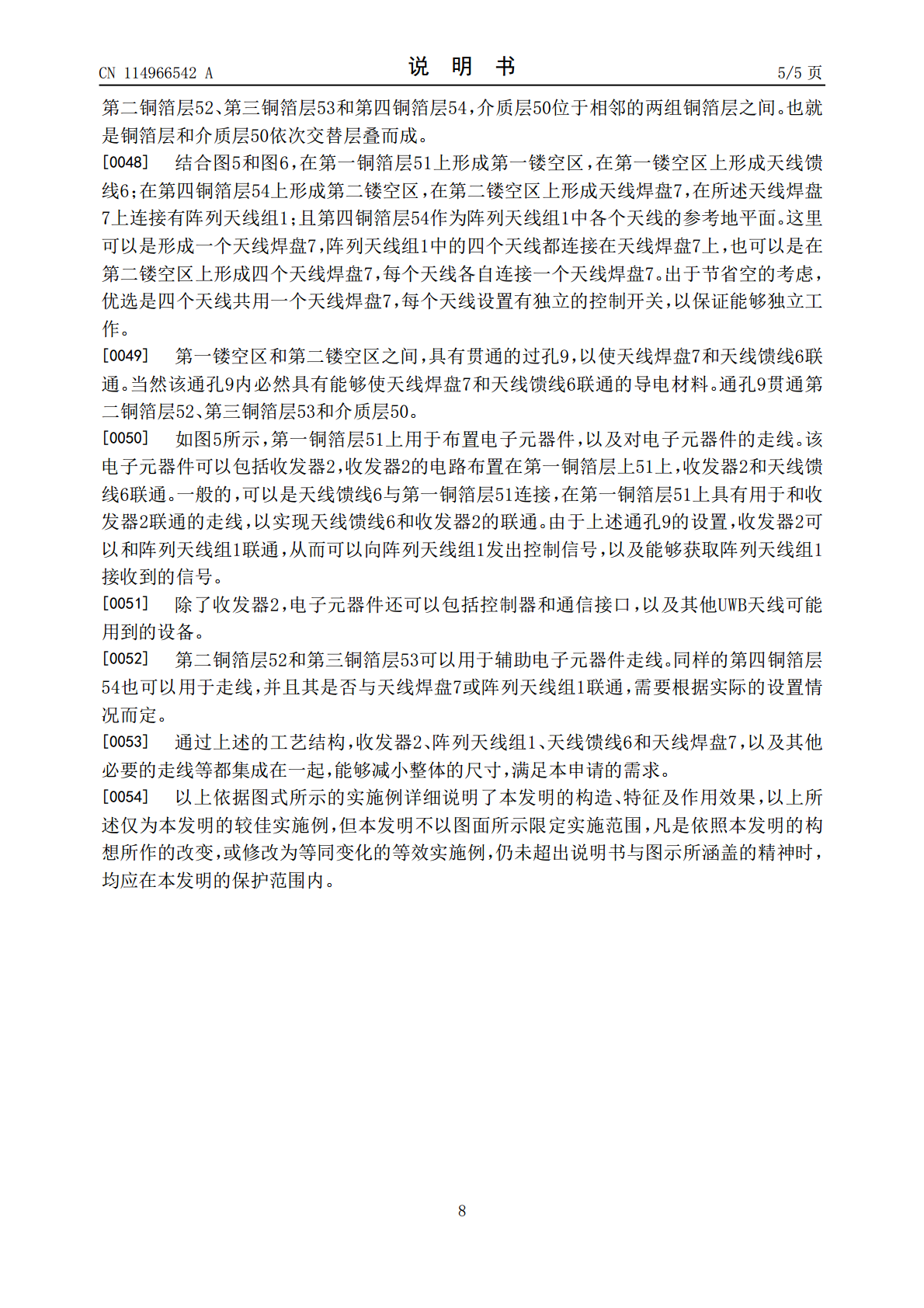
本发明公开了数字钥匙定位天线模块,包括四组铜箔层,分别为:第一铜箔层、第二铜箔层、第三铜箔层和第四铜箔层,在每组铜箔层之间,具有介质层;在第一铜箔层上形成第一镂空区,在第一镂空区上形成天线馈线;在第四铜箔层上形成第二镂空区,在第二镂空区上形成天线焊盘,在天线焊盘上连接有UWB天线;且第四铜箔层作为UWB天线的参考地平面;在第一镂空区和第二镂空区之间,具有贯通的过孔,以使天线焊盘和天线馈线联通。本申请数字钥匙定位天线模块中,四组铜箔层与介质层组成的整体PCB中,UWB天线和天线馈线分别位于两侧,相比现有天线
终端的定位方法和定位系统.pdf
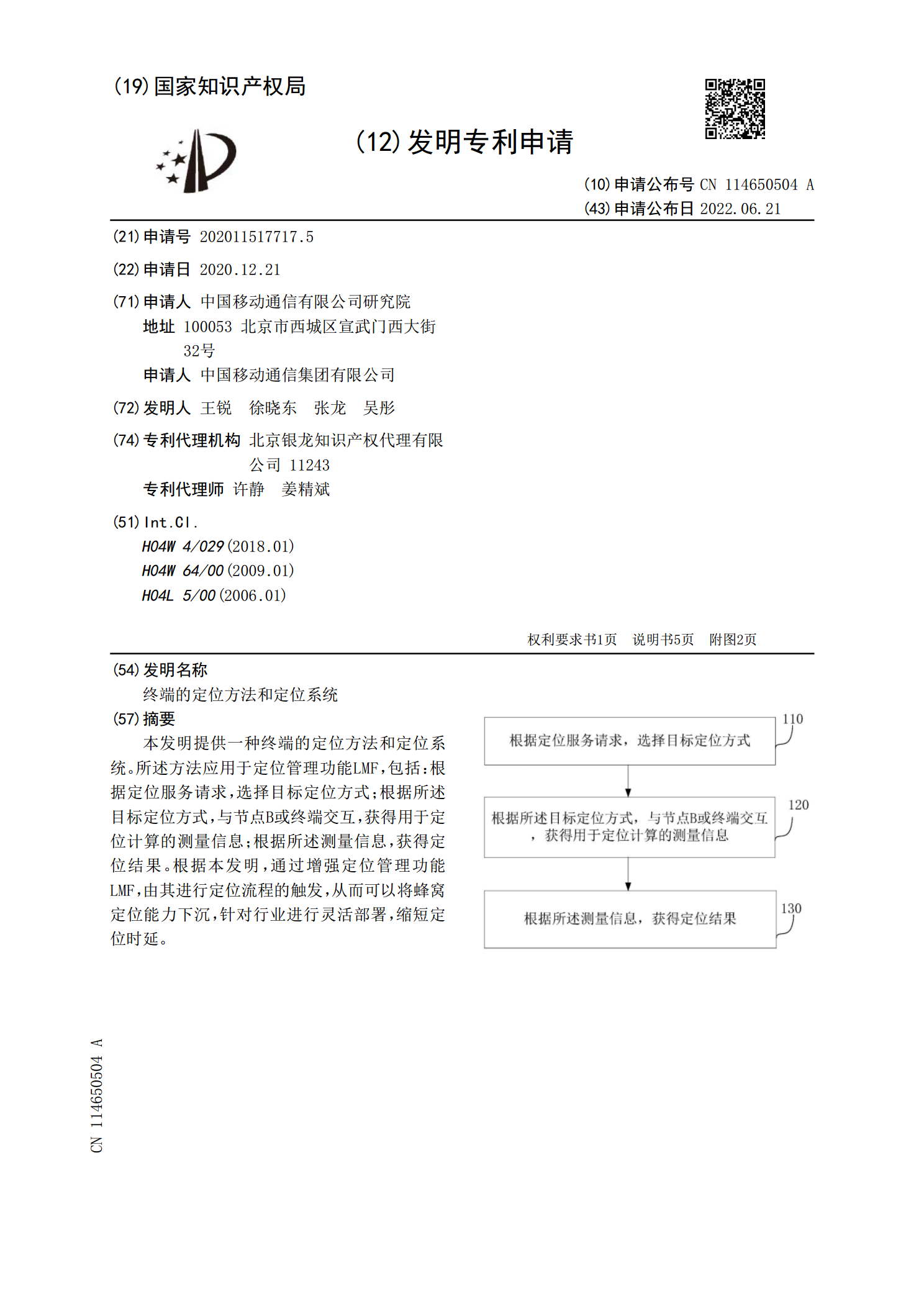
本发明提供一种终端的定位方法和定位系统。所述方法应用于定位管理功能LMF,包括:根据定位服务请求,选择目标定位方式;根据所述目标定位方式,与节点B或终端交互,获得用于定位计算的测量信息;根据所述测量信息,获得定位结果。根据本发明,通过增强定位管理功能LMF,由其进行定位流程的触发,从而可以将蜂窝定位能力下沉,针对行业进行灵活部署,缩短定位时延。
儿童定位系统和定位方法.pdf
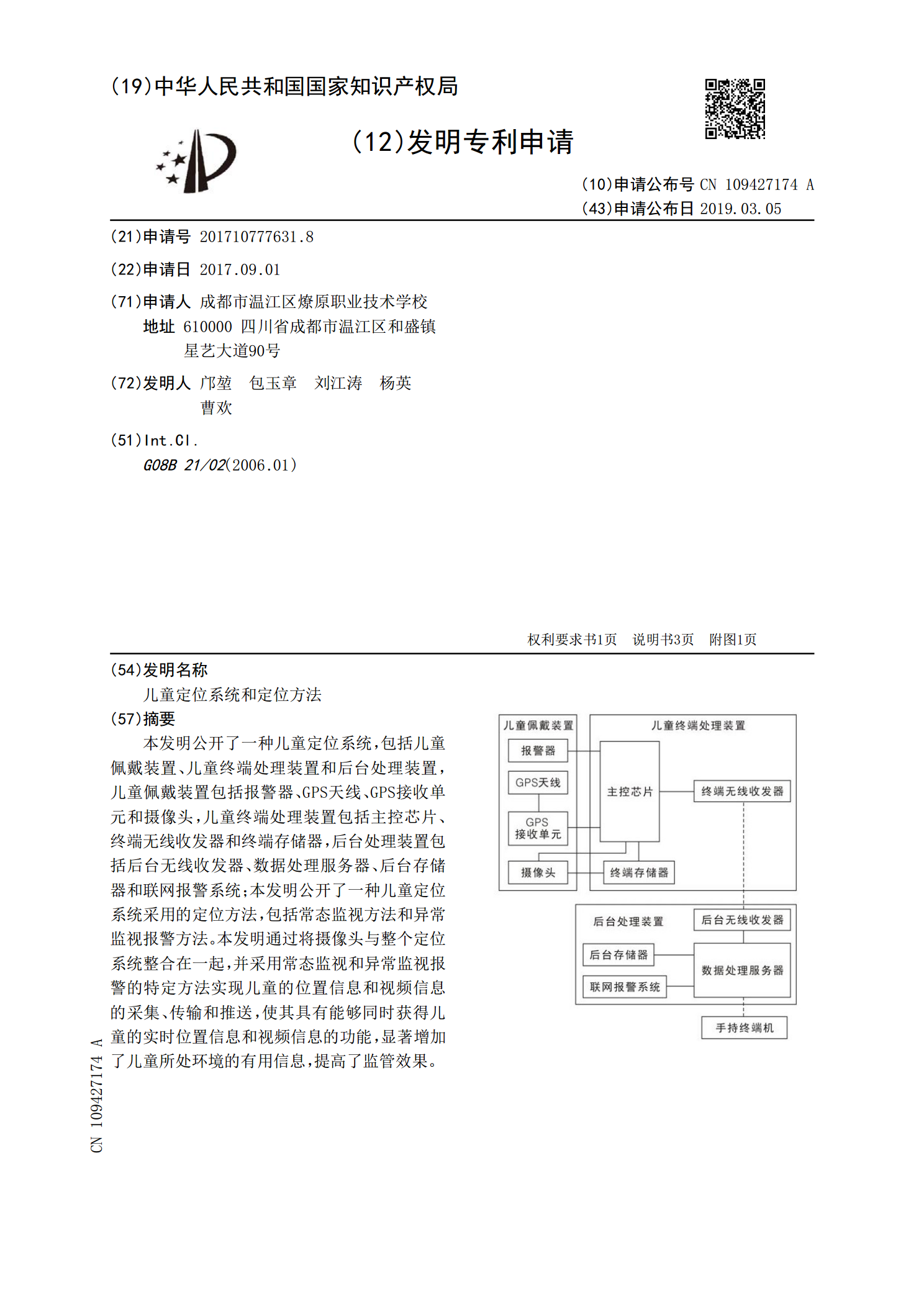
本发明公开了一种儿童定位系统,包括儿童佩戴装置、儿童终端处理装置和后台处理装置,儿童佩戴装置包括报警器、GPS天线、GPS接收单元和摄像头,儿童终端处理装置包括主控芯片、终端无线收发器和终端存储器,后台处理装置包括后台无线收发器、数据处理服务器、后台存储器和联网报警系统;本发明公开了一种儿童定位系统采用的定位方法,包括常态监视方法和异常监视报警方法。本发明通过将摄像头与整个定位系统整合在一起,并采用常态监视和异常监视报警的特定方法实现儿童的位置信息和视频信息的采集、传输和推送,使其具有能够同时获得儿童的实
定位的方法、装置和定位系统.pdf
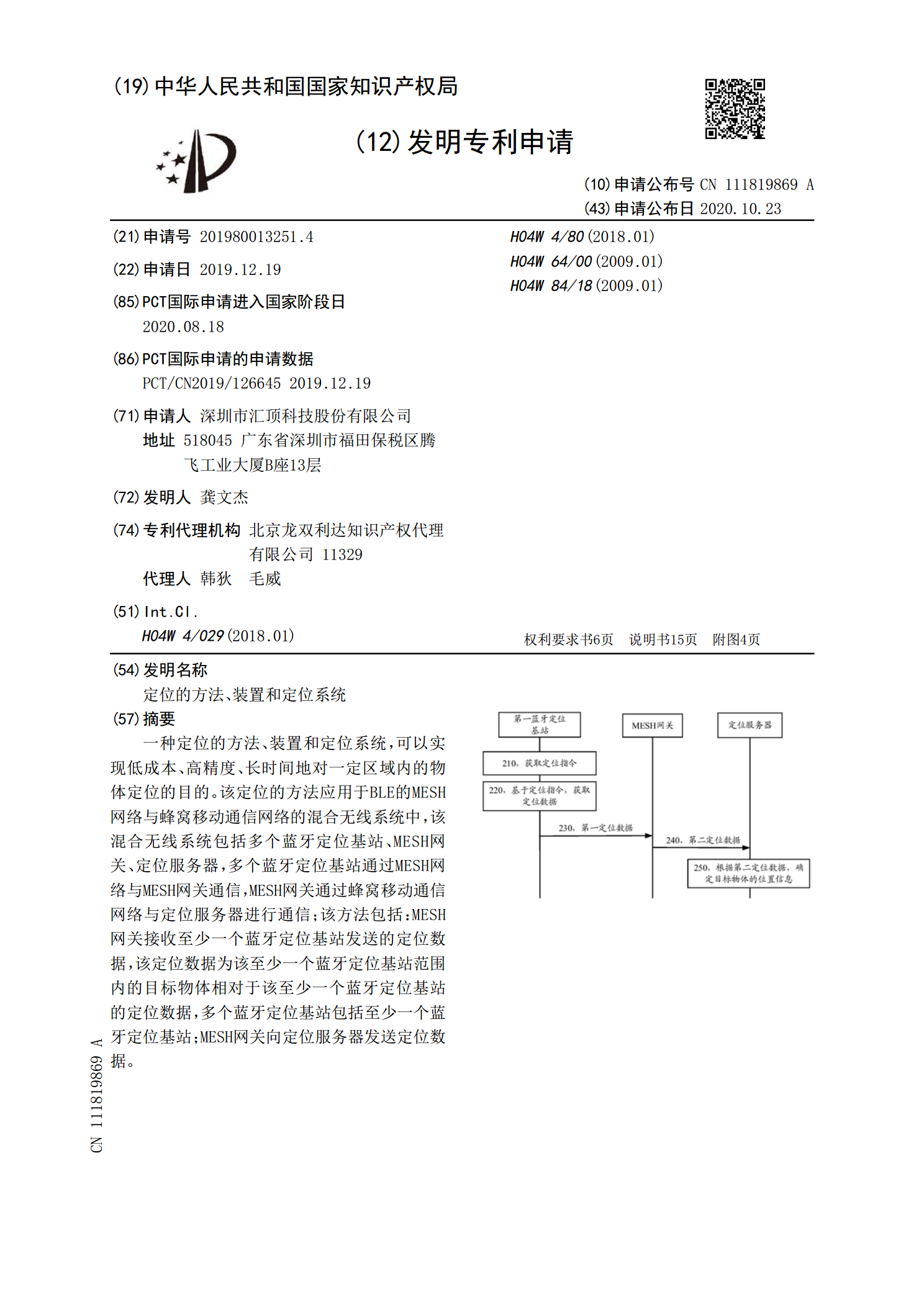
一种定位的方法、装置和定位系统,可以实现低成本、高精度、长时间地对一定区域内的物体定位的目的。该定位的方法应用于BLE的MESH网络与蜂窝移动通信网络的混合无线系统中,该混合无线系统包括多个蓝牙定位基站、MESH网关、定位服务器,多个蓝牙定位基站通过MESH网络与MESH网关通信,MESH网关通过蜂窝移动通信网络与定位服务器进行通信;该方法包括:MESH网关接收至少一个蓝牙定位基站发送的定位数据,该定位数据为该至少一个蓝牙定位基站范围内的目标物体相对于该至少一个蓝牙定位基站的定位数据,多个蓝牙定位基站包括